Робот iRobot Braava 380t: устройство для сухой и влажной протирки гладких полов
Робот для сухой и влажной протирки гладких полов Компания iRobot предлагает, пожалуй, самый широкий спектр бытовых роботов, предназначенных для уборки пола. Это роботы-пылесосы Roomba (например, iRobot Roomba 880, моющие роботы Scooba (текущая модель — iRobot Scooba 450) и, наконец, герой данного обзора, робот для протирки пола — iRobot Braava 380t.
Содержание: Паспортные характеристики, комплект поставки и цена Кинематическая система Два ведущих колеса Способ сбора мусора Сухая или влажная протирка тряпичной салфеткой Режимы очистки Четыре: сухая или влажная уборка, нормальный или быстрый цикл Эффективность очистки До 93 м² — сухая уборка (до 186 м² с дополнительными навигационными кубами NorthStar), до 32 м² — влажная уборка Датчики препятствий Механический передний/боковой бампер, ИК-датчик приближения и механические датчики перепада высоты Датчики ориентации Ориентация с помощью навигационных кубов NorthStar, датчики вращения ведущих колес Управление на корпусе Механические кнопки Оповещение Светодиодная индикация, звуковые сигналы Время автономной работы Сухая уборка до 4 часов, влажная — до 2,5 часов Время зарядки 2 часа на зарядной базе, 4 ч при прямой зарядке Способ зарядки От блока питания или на базе Источник автономного питания Аккумулятор Ni-MH 7,2 В, 2000 мА·ч Масса 1,8 кг Размеры 7×21 см Комплект поставки Робот Зарядная база Блок питания (100—240 В, 50/60 Гц на 12 В, 1 А) Навигационный куб NorthStar и комплект (2 шт.) щелочных элементов питания типа C (LR14) Руководство пользователя Панель Pro-Clean для влажной уборки Панель для сухой уборки Салфетки из микрофибры: голубая — для влажной уборки, белая — для сухой уборки Ссылка на сайт производителя www.irobot.ru Средняя цена по данным Яндекс.Маркет T-11924975 Предложения по данным Яндекс.Маркет L-11924975–10 Внешний вид и функционирование Упакован робот и все к нему небольшую коробку с пластиковой ручкой.
 Оформление коробки строгое, но насыщенное — фотографии, рисунки, схемы, перечисление комплектации и описание основных функций. Внутри коробки в качестве разделителей и защитных вставок используются элементы из экологически безопасного гофрированного картона. Упаковочного пластика немного.
Оформление коробки строгое, но насыщенное — фотографии, рисунки, схемы, перечисление комплектации и описание основных функций. Внутри коробки в качестве разделителей и защитных вставок используются элементы из экологически безопасного гофрированного картона. Упаковочного пластика немного.
 Комплектация в случае данной модели — максимальная:
Комплектация в случае данной модели — максимальная:
 Робот квадратный. Такая форма, видимо, обусловлена стремлением разработчиков использовать максимально широкую и вынесенную вперед чистящую панель, чтобы робот протирал быстро по площади и без пропусков в углах.
Робот квадратный. Такая форма, видимо, обусловлена стремлением разработчиков использовать максимально широкую и вынесенную вперед чистящую панель, чтобы робот протирал быстро по площади и без пропусков в углах.
 Можно было бы закруглить заднюю часть, но ее плоскость тоже несет функциональную нагрузку — на нее робот ставится при зарядке на базе. Конечно, такая квадратность не может не создавать определенные трудности при маневрировании в тесных местах, но любое реальное устройство — это всегда компромисс. Робот относительно низкий и компактный, поэтому ему будет доступна большая часть площади обычной квартиры.
Можно было бы закруглить заднюю часть, но ее плоскость тоже несет функциональную нагрузку — на нее робот ставится при зарядке на базе. Конечно, такая квадратность не может не создавать определенные трудности при маневрировании в тесных местах, но любое реальное устройство — это всегда компромисс. Робот относительно низкий и компактный, поэтому ему будет доступна большая часть площади обычной квартиры.
 Корпус в переходе от вертикальных плоскостей к верхней панели угловатый, однако есть выраженный скос вперед, с одной стороны так робот дальше продвинется вперед под что-то низкое, с другой — есть опасность и заклинить под этим низким препятствием. Корпус в основном изготовлен из практичного черного пластика без покрытия и с матовой поверхностью, за исключением верхней панели и верха бампера, которые имеют черное гладкое полуматовое покрытие, относительно устойчивое к появлению царапин. В центральной части верхней панели есть ромбовидный вырез, прикрытый окошком из тонированного прозрачного для ИК-излучения пластика с зеркально-гладкой поверхностью. Под этим окошком находятся датчики навигационной системы NorthStar. Ближе к передней части расположены кнопки управления (тоже ромбовидные) и почти на переднем ребре — три светодиодных индикатора. Также индикаторами режимов служат и подсвечиваемые снизу значки на кнопках. Цвет всех индикаторов в нормальном состоянии синий (это не лучший выбор), а красный цвет указывает на ошибку. На передней грани корпуса есть прямоугольное окошко тоже из тонированного пластика, за которым спрятаны ИК-датчики, определяющие наличие препятствия прямо по курсу.
Корпус в переходе от вертикальных плоскостей к верхней панели угловатый, однако есть выраженный скос вперед, с одной стороны так робот дальше продвинется вперед под что-то низкое, с другой — есть опасность и заклинить под этим низким препятствием. Корпус в основном изготовлен из практичного черного пластика без покрытия и с матовой поверхностью, за исключением верхней панели и верха бампера, которые имеют черное гладкое полуматовое покрытие, относительно устойчивое к появлению царапин. В центральной части верхней панели есть ромбовидный вырез, прикрытый окошком из тонированного прозрачного для ИК-излучения пластика с зеркально-гладкой поверхностью. Под этим окошком находятся датчики навигационной системы NorthStar. Ближе к передней части расположены кнопки управления (тоже ромбовидные) и почти на переднем ребре — три светодиодных индикатора. Также индикаторами режимов служат и подсвечиваемые снизу значки на кнопках. Цвет всех индикаторов в нормальном состоянии синий (это не лучший выбор), а красный цвет указывает на ошибку. На передней грани корпуса есть прямоугольное окошко тоже из тонированного пластика, за которым спрятаны ИК-датчики, определяющие наличие препятствия прямо по курсу.
 Переднюю часть робота с заходом на бока охватывает оснащенный датчиками подвижный бампер. Датчиков в бампере как минимум два, что позволяет роботу разделять боковое и фронтальное столкновение с препятствиями. Передняя часть бампера прикрыта защитной накладкой из мягкой резины, что уменьшает вероятность повреждения роботом предметов обстановки. Однако на уголках бампера есть выступы из твердого гладкого пластика, видимо, для того, чтобы при поворотах робот не цеплялся за предметы. На задней грани присутствуют контактные площадки для зарядки на базе и подпружиненная откидывающаяся вверх ручка для переноски робота.
Переднюю часть робота с заходом на бока охватывает оснащенный датчиками подвижный бампер. Датчиков в бампере как минимум два, что позволяет роботу разделять боковое и фронтальное столкновение с препятствиями. Передняя часть бампера прикрыта защитной накладкой из мягкой резины, что уменьшает вероятность повреждения роботом предметов обстановки. Однако на уголках бампера есть выступы из твердого гладкого пластика, видимо, для того, чтобы при поворотах робот не цеплялся за предметы. На задней грани присутствуют контактные площадки для зарядки на базе и подпружиненная откидывающаяся вверх ручка для переноски робота.
 Ручка это по очевидным причинам будет бесполезна при установке на зарядную базу. Перевернем робота днищем вверх.
Ручка это по очевидным причинам будет бесполезна при установке на зарядную базу. Перевернем робота днищем вверх.
 Видно, что резиновая накладка на бампере изнутри имеет выступы, смягчающие удар бампера о корпус робота. В передней части корпуса есть большое пространство для установки чистящей панели. Два цилиндрических выступа с резиновыми полусферами опускаются и поднимаются, следуя рельефу пола, помогая роботу определять значительный перепад высоты. По краям центральной перегородки на днище можно обнаружить коаксиальный разъем для прямой зарядки от блока питания и в противоположной стороне — резиновую заглушку, под которой спрятан разъем Mini-USB, предназначенный, видимо, для диагностики и обновления микропрограммы робота. Винт с головкой под плоскую отвертку фиксирует крышку отсека аккумулятора, который подключается к роботу с помощью разъема на проводах, что менее удобно, чем контактные площадки у аккумуляторов Scooba или Roomba.
Видно, что резиновая накладка на бампере изнутри имеет выступы, смягчающие удар бампера о корпус робота. В передней части корпуса есть большое пространство для установки чистящей панели. Два цилиндрических выступа с резиновыми полусферами опускаются и поднимаются, следуя рельефу пола, помогая роботу определять значительный перепад высоты. По краям центральной перегородки на днище можно обнаружить коаксиальный разъем для прямой зарядки от блока питания и в противоположной стороне — резиновую заглушку, под которой спрятан разъем Mini-USB, предназначенный, видимо, для диагностики и обновления микропрограммы робота. Винт с головкой под плоскую отвертку фиксирует крышку отсека аккумулятора, который подключается к роботу с помощью разъема на проводах, что менее удобно, чем контактные площадки у аккумуляторов Scooba или Roomba.
 Ведущие колесики робота жестко закреплены на платформе, но сама платформа может перемещаться вверх и вниз и наклоняться вправо-влево относительно внешнего корпуса робота. Такая подвеска, как и резиновые покрышки с мелким рисунком протектора обеспечивают некоторую минимальную проходимость робота — даже на гладких полах, для которых предназначен робот, могут встречаться неровности и небольшие препятствия. На корпусах редукторов ведущих колес есть канавка, которая соответствует прорези в корпусе платформы, такое сочетание упрощает удаление намотавшихся под колеса ниток и волос. На заднюю часть днища наклеены резиновые площадки, видимо, для предотвращения стука и скрежета при касании днищем пола. Заряжается робот от комплектного адаптера питания, который можно подключать непосредственно к разъему на днище робота, тогда аккумулятор заряжается за четыре часа.
Ведущие колесики робота жестко закреплены на платформе, но сама платформа может перемещаться вверх и вниз и наклоняться вправо-влево относительно внешнего корпуса робота. Такая подвеска, как и резиновые покрышки с мелким рисунком протектора обеспечивают некоторую минимальную проходимость робота — даже на гладких полах, для которых предназначен робот, могут встречаться неровности и небольшие препятствия. На корпусах редукторов ведущих колес есть канавка, которая соответствует прорези в корпусе платформы, такое сочетание упрощает удаление намотавшихся под колеса ниток и волос. На заднюю часть днища наклеены резиновые площадки, видимо, для предотвращения стука и скрежета при касании днищем пола. Заряжается робот от комплектного адаптера питания, который можно подключать непосредственно к разъему на днище робота, тогда аккумулятор заряжается за четыре часа.
 Второй вариант — подключить адаптер к базе, а на базу установить работа контактами к базе, тогда на зарядку потребуется всего два часа.
Второй вариант — подключить адаптер к базе, а на базу установить работа контактами к базе, тогда на зарядку потребуется всего два часа.
 В данном случае, никаких объективных причин, по которым на базе робот от того же адаптера с таким же разъемом заряжается быстрее, нет, это просто способ склонить пользователя к покупке модели 380t с базой в комплекте или к дополнительным расходам на базу в случае модели Braava 380 (впрочем, ее в списке официально поставляемых в Россию роботов iRobot мы не увидели). База ничего сложного из себя не представляет — небольшой корпус из черного пластика по бокам и снизу с матовой поверхностью и зеркально-гладкой неустойчивой поверхностью сверху.
В данном случае, никаких объективных причин, по которым на базе робот от того же адаптера с таким же разъемом заряжается быстрее, нет, это просто способ склонить пользователя к покупке модели 380t с базой в комплекте или к дополнительным расходам на базу в случае модели Braava 380 (впрочем, ее в списке официально поставляемых в Россию роботов iRobot мы не увидели). База ничего сложного из себя не представляет — небольшой корпус из черного пластика по бокам и снизу с матовой поверхностью и зеркально-гладкой неустойчивой поверхностью сверху.
 Снизу — четыре резиновые противоскользящие накладки, сверху — направляющие выступы и подпружиненные контактные площадки.
Снизу — четыре резиновые противоскользящие накладки, сверху — направляющие выступы и подпружиненные контактные площадки.
 А внутри — геркон, замыкающий цепь на контакты при установке робота (у него сзади в ручке спрятан магнит), и светодиод.
А внутри — геркон, замыкающий цепь на контакты при установке робота (у него сзади в ручке спрятан магнит), и светодиод.
В комплект поставки включены две панели — для сухой и для влажной уборки. Закрепляются панели на днище робота в передней его части, при этом выступающие датчики перепада высоты служат направляющими, помогающими правильно сориентировать панель, а на месте панель фиксируется с помощью магнитных держателей.
 Нижняя часть обеих панелей прикрыта накладкой из пористого мягкого пластика с рельефом в виде ромбиков-пупырышков.
Нижняя часть обеих панелей прикрыта накладкой из пористого мягкого пластика с рельефом в виде ромбиков-пупырышков.
 На панели для сухой уборки салфетка фиксируется путем подворачивания ее длинных краев под голубые фиксаторы. Одна половинка такого фиксатора жесткая, вторая упругая, край салфетки подсовывается под жесткую часть фиксатора и поджимается упругой. Такой механизм позволяет использовать в принципе любые много- или одноразовые салфетки подходящего размера. В комплекте поставки есть одна многоразовая белая салфетка из микрофибры.
На панели для сухой уборки салфетка фиксируется путем подворачивания ее длинных краев под голубые фиксаторы. Одна половинка такого фиксатора жесткая, вторая упругая, край салфетки подсовывается под жесткую часть фиксатора и поджимается упругой. Такой механизм позволяет использовать в принципе любые много- или одноразовые салфетки подходящего размера. В комплекте поставки есть одна многоразовая белая салфетка из микрофибры.
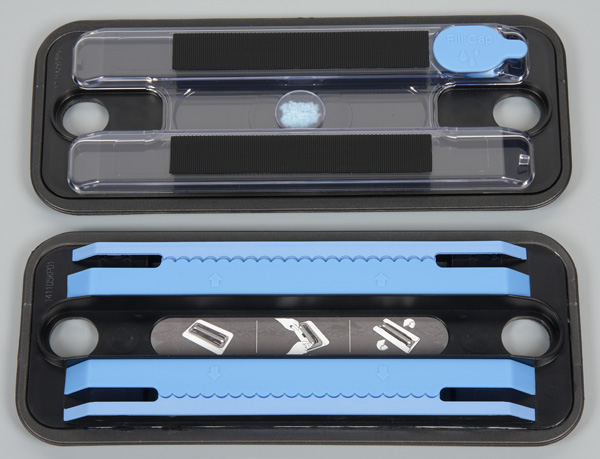 Устройство панели для влажной уборки чуть более сложное, так как она оснащена резервуаром для жидкости, изготовленным из прозрачного пластика. Заполняется этот резервуар через отверстие сверху, закрывающееся заглушкой из упругого пластика. На салфетку жидкость потихоньку просачивается по фитилю, который закреплен в резиновой заглушке, вставленной в нижнее центральное отверстие в резервуаре. Для влажной уборки используется многоразовая голубая салфетка из микрофибры, края которой цепляются за две площадки с микрокрючками.
Устройство панели для влажной уборки чуть более сложное, так как она оснащена резервуаром для жидкости, изготовленным из прозрачного пластика. Заполняется этот резервуар через отверстие сверху, закрывающееся заглушкой из упругого пластика. На салфетку жидкость потихоньку просачивается по фитилю, который закреплен в резиновой заглушке, вставленной в нижнее центральное отверстие в резервуаре. Для влажной уборки используется многоразовая голубая салфетка из микрофибры, края которой цепляются за две площадки с микрокрючками.
 В данном случае производитель настаивает на использовании оригинальной салфетки. Добавим, что в резервуар заливается порядка 100 мл жидкости, в качестве которой производитель рекомендует использовать просто воду, или, например, фирменные разбавленные средства iRobot Hard Floor Cleaner и Scooba Natural Enzyme Hard Floor Cleaner, и не рекомендует растворы уксуса, аммиака, отбеливателя, что-то напоминающее мыло, воск и средства для полировки. В любом случае моющее средство должно быть совместимым с тем типом напольного покрытия, на котором используется робот.
В данном случае производитель настаивает на использовании оригинальной салфетки. Добавим, что в резервуар заливается порядка 100 мл жидкости, в качестве которой производитель рекомендует использовать просто воду, или, например, фирменные разбавленные средства iRobot Hard Floor Cleaner и Scooba Natural Enzyme Hard Floor Cleaner, и не рекомендует растворы уксуса, аммиака, отбеливателя, что-то напоминающее мыло, воск и средства для полировки. В любом случае моющее средство должно быть совместимым с тем типом напольного покрытия, на котором используется робот.
Робот будет эффективным на гладком и ровном полу с покрытием из дерева, ламината, плитки, линолеума и т.д. Не стоит запускать Braava на полах с грубой поверхностью, за которую будет цепляться салфетка. Отметим, что этот робот пол не натирает, не моет и не убирает с пола крупный мусор, Braava пол только протирает, то есть удаляет с него пыль, прочий незначительный мусор и может оттереть несильное загрязнение. Также перед запуском Braava стоит убедиться, что на полу нет предметов, которые, попав под салфетку, смогут поцарапать поверхность пола при перемещениях робота.
Ориентироваться роботу в помещении помогает собственная навигационная система NorthStar. Путеводной звездой для робота служат метки, проецируемые на потолок помещения с помощью навигационного куба. Куб этот представляет собой небольшое устройство с корпусом из черного матового снаружи пластика. Верхняя панель куба — из тонированного зеркально-гладкого прозрачного для ИК-излучения пластика.
 На днище — четыре резиновые накладки по углам.
На днище — четыре резиновые накладки по углам.
 На переднем вертикальном ребре в верхней его части есть индикатор состояния (синий), а напротив него на ребре сзади — кнопка включения. Работает куб от двух элементов питания типа C, что придает ему вес и достаточную устойчивость. При работе в паре с роботом куб следует установить на каком-нибудь возвышении (чтобы робот его не сдвинул) и направить в центр помещения. Метки на потолок проецируются с помощью ИК-излучения, поэтому их глазом не видно. Отметим, что такой способ разметки предъявляет определенные требования к потолку — он должен быть достаточно светлым, не очень высоким, и, например, потолочный вентилятор может мешать правильной работе навигационной системы робота. Производитель упоминает, что поддерживается работа с несколькими навигационными кубами, что поможет расширить зону охвата за один цикл уборки, но для этого кубы должны иметь различающийся код (он указан на днище куба). В варианте с одним кубом по завершении одного цикла куб можно переставить в другое место/комнату и запустить робота там. Braava 380t поддерживает связь с кубом по беспроводному интерфейсу, за счет этого робот может контролировать удаленность от куба, а также включать его в начале уборки и выключать по завершении этого процесса. Робот может убирать и без куба, но заявляется, что в этом случае убираемая за цикл площадь сокращается, Braava не будет тщательно убирать по краям территории и не будет поддерживаться режим приостановки уборки (например, для смены салфетки). На самом деле тонкостям правильного использования системы NorthStar посвящен целый раздел в руководстве (плюс описание возможных проблем и того, как их устранять), пользователям Braava лучше его внимательно изучить, впрочем, как и другие разделы руководства, так как несмотря на кажущуюся простоту, есть и определенные особенности в использовании этого протирателя полов.
На переднем вертикальном ребре в верхней его части есть индикатор состояния (синий), а напротив него на ребре сзади — кнопка включения. Работает куб от двух элементов питания типа C, что придает ему вес и достаточную устойчивость. При работе в паре с роботом куб следует установить на каком-нибудь возвышении (чтобы робот его не сдвинул) и направить в центр помещения. Метки на потолок проецируются с помощью ИК-излучения, поэтому их глазом не видно. Отметим, что такой способ разметки предъявляет определенные требования к потолку — он должен быть достаточно светлым, не очень высоким, и, например, потолочный вентилятор может мешать правильной работе навигационной системы робота. Производитель упоминает, что поддерживается работа с несколькими навигационными кубами, что поможет расширить зону охвата за один цикл уборки, но для этого кубы должны иметь различающийся код (он указан на днище куба). В варианте с одним кубом по завершении одного цикла куб можно переставить в другое место/комнату и запустить робота там. Braava 380t поддерживает связь с кубом по беспроводному интерфейсу, за счет этого робот может контролировать удаленность от куба, а также включать его в начале уборки и выключать по завершении этого процесса. Робот может убирать и без куба, но заявляется, что в этом случае убираемая за цикл площадь сокращается, Braava не будет тщательно убирать по краям территории и не будет поддерживаться режим приостановки уборки (например, для смены салфетки). На самом деле тонкостям правильного использования системы NorthStar посвящен целый раздел в руководстве (плюс описание возможных проблем и того, как их устранять), пользователям Braava лучше его внимательно изучить, впрочем, как и другие разделы руководства, так как несмотря на кажущуюся простоту, есть и определенные особенности в использовании этого протирателя полов.
Робот может убирать в двух режимах — сухая и влажная уборка. Различаются режимы характером движения и ограничением на максимальную площадь за цикл. В режиме сухой уборки робот движется змейкой, в случае влажной — елочкой с возвратно-поступательным движение то вправо, то влево. Для влажной уборки площадь за цикл ограничена 32 квадратными метрами, чтобы хватило резервуара на увлажнение салфетки. Для каждого режима лучше использовать соответствующую панель и салфетку, но робот не определяет тип установленной панели (как и уровень жидкости в резервуаре, хотя, по идее, мог бы делать и то, и другое). В итоге пользователь должен в явном виде задать режим, нажав или на кнопку с веником (сухая уборка) или на кнопку с каплей (влажная уборка). Длительное нажатие на соответствующую кнопку включает вариант быстрой уборки (сухой или влажной), в котором робот убирает в основном по площади, уделяя меньше внимания областям впритык к предметам и близко к стенам.
Тестирование Тестирование этого робота для протирки полов было несколько поверхностным, так как у нас нет ни соответствующей методики, ни подходящего для серьезных тестов помещения. На пробу мы запустили робота в нескольких помещения в различных режимах. Видеофрагменты, приведенные ниже демонстрируют некоторые этапы этого тестирования.
Тест 1. Влажная уборка в ограниченном помещении (примерно 30 кв. м) с использованием NorthStar. Видеофрагмент с началом уборки и как робот выбирается из сложных мест:
Навигационный куб был установлен по центру короткой (3,62 м) стены на подоконник. На уборку этого помещения робот затратил 1 час 22 минуты. Пол не стал заметно чище (впрочем, он был очень грязным), но салфетка загрязнилась:
 Правда, мы совершили ошибку, так как салфетку нужно было увлажнить целиком до начала уборки (о чем написано в руководстве). Просачивающейся через фитиль жидкости хватает только на поддержание влажной изначально салфетки. Поэтому у нас влажной оставалась лишь центральная часть салфетки, как и след от робота. В качестве моющей жидкости мы использовали воду с добавлением фирменного средства iRobot Hard Floor Cleaner. В конце уборки в резервуаре осталось примерно 20 мл жидкости. С точки зрения охвата территории робот хорошо справился с задачей, так как на наш экспертный взгляд робот прошел всю поверхность пола со значительным перекрытием, не оставив без внимания прилегающие к стенам и предметам обстановки участки. Робот проявляет достаточную настойчивость в попытках забраться в тесные места и в большинстве случаев успешно оттуда выбирается. Но не всегда, поэтому за первые несколько уборок слишком узкие проходы нужно или расширить или наоборот заблокировать, чтобы робот туда даже и не совался. О завершении уборки робот сигнализирует звуковым сигналом, потом едет к месту старта, останавливается, поворачивается в то же положение, что и при старте и завершающим писком сигнализирует о полном окончании работ. Связь с кубом NorthStar сохранялась вплоть до противоположной стены (расстояние 8,35 м), но именно позиционирование по меткам на потолке происходило, скорее всего, на расстоянии не более двух метров от куба, на большем расстоянии робот ориентировался, видимо, по памяти, определяя свое положение по датчикам вращения ведущих колес, и периодически восстанавливая точную привязку, подъезжая ближе к кубу. Такая комбинированная система ориентации позволяет, в частности, роботу заезжать под столы, диваны и т. д., откуда он точно не может видеть метки на потолке.
Правда, мы совершили ошибку, так как салфетку нужно было увлажнить целиком до начала уборки (о чем написано в руководстве). Просачивающейся через фитиль жидкости хватает только на поддержание влажной изначально салфетки. Поэтому у нас влажной оставалась лишь центральная часть салфетки, как и след от робота. В качестве моющей жидкости мы использовали воду с добавлением фирменного средства iRobot Hard Floor Cleaner. В конце уборки в резервуаре осталось примерно 20 мл жидкости. С точки зрения охвата территории робот хорошо справился с задачей, так как на наш экспертный взгляд робот прошел всю поверхность пола со значительным перекрытием, не оставив без внимания прилегающие к стенам и предметам обстановки участки. Робот проявляет достаточную настойчивость в попытках забраться в тесные места и в большинстве случаев успешно оттуда выбирается. Но не всегда, поэтому за первые несколько уборок слишком узкие проходы нужно или расширить или наоборот заблокировать, чтобы робот туда даже и не совался. О завершении уборки робот сигнализирует звуковым сигналом, потом едет к месту старта, останавливается, поворачивается в то же положение, что и при старте и завершающим писком сигнализирует о полном окончании работ. Связь с кубом NorthStar сохранялась вплоть до противоположной стены (расстояние 8,35 м), но именно позиционирование по меткам на потолке происходило, скорее всего, на расстоянии не более двух метров от куба, на большем расстоянии робот ориентировался, видимо, по памяти, определяя свое положение по датчикам вращения ведущих колес, и периодически восстанавливая точную привязку, подъезжая ближе к кубу. Такая комбинированная система ориентации позволяет, в частности, роботу заезжать под столы, диваны и т. д., откуда он точно не может видеть метки на потолке.
Тест 2. Сухая быстрая уборка в ограниченном помещении (примерно 30 кв. м) с использованием NorthStar. Видеофрагмент с началом уборки и как робот возвращается к месту запуска:
Ну уборку в этом режиме робот потратил 21 минуту 30 секунд. Салфетка явно собрала на себя часть грязи с пола:
 Тест 3 и 4. Сухая и влажная уборка в «прихожей» с коридором, поворачивающим под 90 градусов с использованием NorthStar.
На схеме ниже цветом обозначены площади, куда робот мог заехать в принципе, а именно желтым — убранная им площадь. Так же на схеме указано место установки навигационного куба:
Тест 3 и 4. Сухая и влажная уборка в «прихожей» с коридором, поворачивающим под 90 градусов с использованием NorthStar.
На схеме ниже цветом обозначены площади, куда робот мог заехать в принципе, а именно желтым — убранная им площадь. Так же на схеме указано место установки навигационного куба:
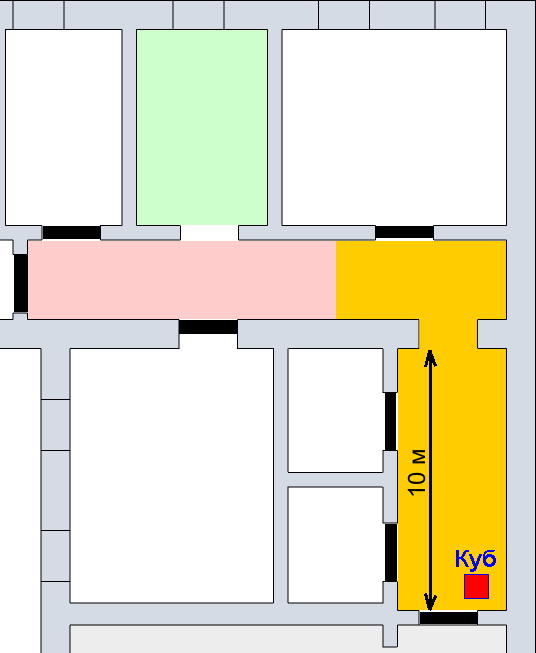 Видно, что робот забирался на какое-то расстояние за угол, где он точно не мог видеть метки от куба на потолке. Сухую уборку этой площади робот осуществил за примерно 27 минут, а влажную — за 38 минут, и в конце последней указал индикаторами на разряд батареи, то есть, может быть, убрал не до конца. Всего от одного заряда батареи в этих 4-х комбинированных тестах робот проработал примерно 2 часа 50 минут.
Видно, что робот забирался на какое-то расстояние за угол, где он точно не мог видеть метки от куба на потолке. Сухую уборку этой площади робот осуществил за примерно 27 минут, а влажную — за 38 минут, и в конце последней указал индикаторами на разряд батареи, то есть, может быть, убрал не до конца. Всего от одного заряда батареи в этих 4-х комбинированных тестах робот проработал примерно 2 часа 50 минут.
Тест 5. Сухая уборка в «коридоре» шириной 2,7 м без использования NorthStar. В этом тесте робот запускался без использования его фирменной навигационной системы. Место старта располагалось в торце коридора посередине и впереди было порядка 15 м относительно свободной площади. В этих условиях робот убирал 30 минут и забрался вперед от места старта на 10,6 м. С виду была охвачена почти вся площадь до указанного предела, но при уборке у робота явно немного сбилась ориентация, так как начинал он убирать змейкой параллельно стенам, а закончил под некоторым заметным углом. Ориентация, видимо, сбивалась при объезде препятствий в виде косяков дверей, существенных неровностей пола и пары предметов обстановки, когда ведущие колеса робота могли проскальзывать. Именно для восстановления ориентации роботу нужна периодическая сверка с метками на потолке от куба. Впрочем, как показал проведенный тест, и без куба робот неплохо справляется со своей работой.
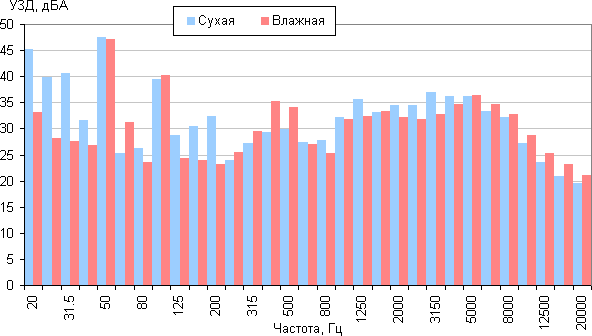
Уровень шума и энергетические характеристики. При работе робот шумит не очень сильно, а в сравнении с роботами-пылесосами Braava вообще можно считать очень тихим устройством. При этом основной вклад в шум вносит трение салфетки с налипшем на ней мусором о поверхность пола, поэтому к приведенным ниже данным нужно относиться как к ориентировочным и применимым только к конкретному тесту. Микрофон шумомера располагался примерно на высоте 1,2 м над работающим роботом:
Режим Уровень шума, дБА, усредненное значение Сухая уборка 46 Влажная уборка 45 И спектры по ⅓ октавам:
 При зарядке робота на базе потребление от электросети достигает максимум 14 Вт. Если Braava заряжен и подключен к блоку питания, то от сети потребляется 1,0 Вт. Блок питания включенный в сеть, но не подключенный к роботу потребляет 0,2 Вт. После уборки до сигнала о разряде батареи заряд аккумулятора при зарядке на базе восстанавливается за 2 часа. При этом блок питания нагревается до состояния тепло, и в любых режимах работы он не издает слышимых на расстоянии метра шумов. Если подключить БП непосредственно к роботу, то при зарядке от сети потребляется примерно 7,5 Вт, то есть следует ожидать увеличение времени зарядки до 4 часов.
При зарядке робота на базе потребление от электросети достигает максимум 14 Вт. Если Braava заряжен и подключен к блоку питания, то от сети потребляется 1,0 Вт. Блок питания включенный в сеть, но не подключенный к роботу потребляет 0,2 Вт. После уборки до сигнала о разряде батареи заряд аккумулятора при зарядке на базе восстанавливается за 2 часа. При этом блок питания нагревается до состояния тепло, и в любых режимах работы он не издает слышимых на расстоянии метра шумов. Если подключить БП непосредственно к роботу, то при зарядке от сети потребляется примерно 7,5 Вт, то есть следует ожидать увеличение времени зарядки до 4 часов.
Выводы Проведенные тесты убедили нас что iRobot Braava 380t хорошо справляется с поставленными перед ним задачами, а именно протирает полы в режиме сухой и влажной уборки. Сравнивать особо не с чем, поэтому вместо перечисления достоинств и недостатков выскажем осторожное мнение. В случае данной модели нам понравилась комплектация: есть два вида панелей, для сухой и для влажной уборки, база для ускоренной зарядки и навигационный куб. Впрочем, в коробке с роботом хотелось бы видеть больше многоразовых салфеток каждого вида, чтобы робот мог выполнять несколько циклов уборки подряд, без промежуточной стирки салфеток, да и флакон фирменного моющего средства также не помешал бы. И нам не очень понравилось то, что производитель необоснованно увеличил время зарядки при прямом подключении адаптера питания. Отметим, что Braava 380t может использоваться сам по себе, однако если в период между уборками на полу появляется относительно много мусора и грязи, то до запуска Braava рационально воспользоваться услугами робота-пылесоса или моющего робота, то есть, например, одной из моделей Roomba или Scooba этого же производителя, а Braava применять для финишной уборки пола.
Благодарим компанию «НоркПалм», являющуюся официальным партнером iRobot Corporation, за предоставленный на тестирование iRobot Braava 380t
Полный текст статьи читайте на iXBT
