Роботы-насекомые: удивительные и перспективные проекты
Несмотря на существование магнитных микроботов, ученые продолжают искать компромисс — простое и функциональное решение в конструировании крошечных роботов. Они могут быть полезны в медицине, разведке и исследовании ареалов.
Под катом собрали перспективные проекты роботов-насекомых. Каких размеров и форм они бывают, как работают — рассказываем в подборке.
HAMR-F — робот-таракан
Миниатюризация приводит исследователей на стык электроники и «примитивных» механизмов. К первой группе относится последняя версия гарвардского робота-таракана HAMR-F, которая вышла в 2018 году.
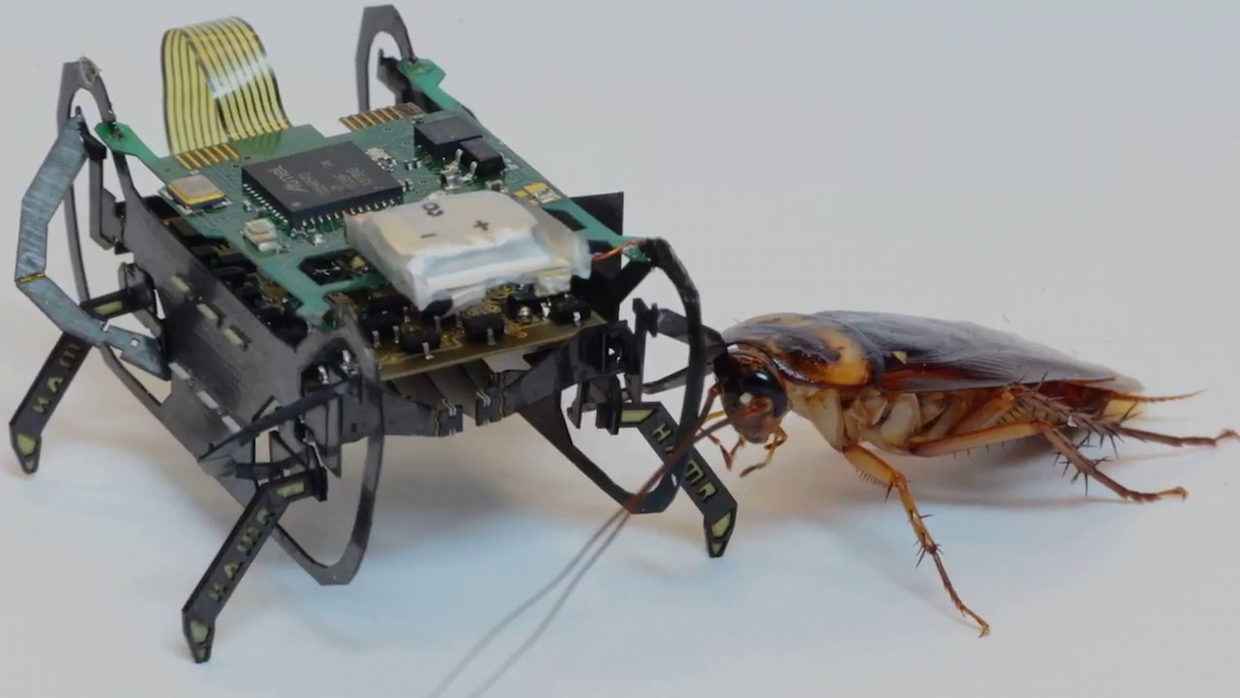
HAMR-F. Источник
Цель была проста — сделать мобильного и небольшого робота для исследования труднодоступных мест.
Устройство HAMR-F
На борту установлены два микроконтроллера, приводы для управления клешнями и литий-полимерная батарея на 8 мАч. Полностью собранный робот весит 2,8 грамма, а его длина — 4,5 см. Относительно следующих проектов это много. HAMR-F не только самый габаритный, но и самый тяжелый среди «насекомых».
Возможности и перспективы
Зато робот опережает конкурентов в скорости: HAMR-F может пробежать 17,2 см за секунду. Это почти в 4 раза больше его длины.
Робот-муравей MicroTug

MicroTug. Источник
В 2015 году ученые из Стэнфорда создали робота, который может передвигать массу, превышающую его собственную в 2000 раз. Притом, что масса «муравья» составляет 12 г.
Демонстрация возможностей MicroTug
Устройство робота
Можно подумать, что брюшко робота прилегает вплотную к поверхности и создает вакуум, но это не совсем так.

На брюшке расположен механизм, который опускает клейкую основа до упора с поверхностью. Трос подтягивает груз и робот отцепляется от поверхности. Такие рывки робот продолжает делать, пока не доползет до пункта назначения. В остальном устройство робота напоминает HAMR-F.
Как и HAMR-F, робот может исследовать только наземные объекты. Но это не единственная «среда обитания» роботов-насекомых. Доказательство этому — проект RoboBee.
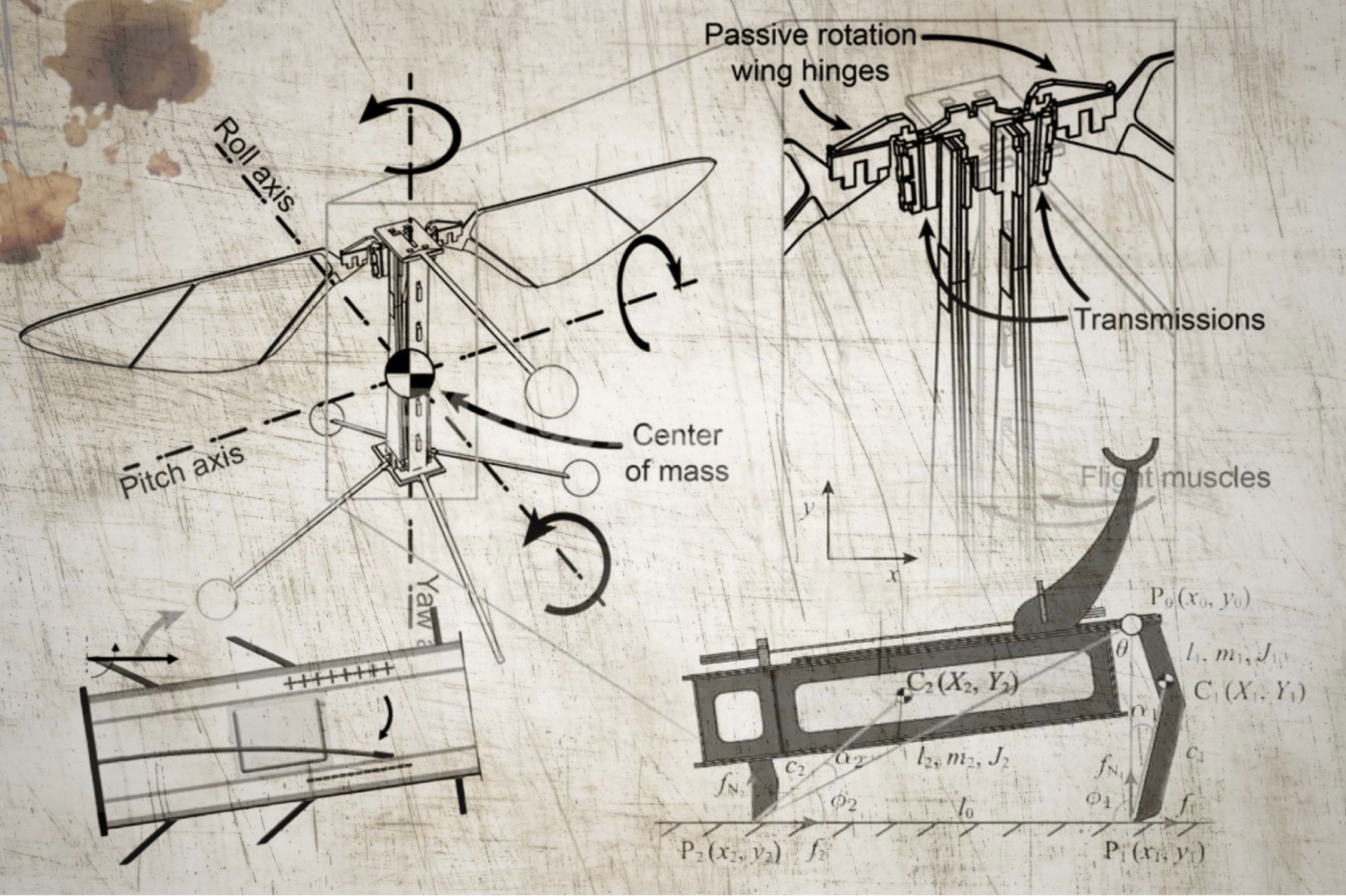
RoboBee — пчела-рыба
В 2013 году группа ученых из Гарвардского университета представила робота-пчелу.
Невооруженным взглядом робота сложно отличить от летающего полосатого насекомого. Хотя, кажется, робот больше напоминает стрекозу.

RoboBee. Источник
Его габариты соответствующие: длина — 3 см, масса — 80 мг. Даже звук от крыльев напоминает шелест крыльев стрекозы. Притом частота взмахов стрекозинных крыльев меньше, чем у RoboBee: 80 Гц против 120 Гц.
Взлет RoboBee
Устройство RoboBee
Системы управления RoboBee были разработаны с нуля. Крошечный робот использует пьезоэлектрические приводы, которые расширяются и сжимаются при воздействии электромагнитного поля. Пьезоэлектрический моторочик — одна из немногих миниатюрных альтернатив электромагнитных двигателей.
Корпус RoboBee выполнен из углеродистого волокна. Это придает роботу легкость и прочность. Крылья могут вращаться как синхронно, так и по отдельности.

Конструкция RoboBee. Источник
Конкретно у первой модели есть проблемы с питанием. По аналогии с роботом-оригами Mori, о котором мы писали в предыдущей статье, к роботу через медный кабель подключен внешний источник питания. Оттого полеты RoboBee могут напоминать игру с воздушным змеем.
Полеты под водой
В 2015 году разработчики доработали проект и заявили, что робот может перемещаться под водой. Но не все так однозначно: вторая версия RoboBee способна лишь на переход из воздушной среды в воду. RoboBee переходит из воздуха в воду
Робот не может сделать обратный переход из воды в воздух. Это связано с тем, что плотность воды в 100 раз больше плотности воздуха. Когда робот помещается в воду, частота взмахов тут же снижается до 9–13 Гц. Набрать обороты заново проблематично.
Решения проблем
Третья версия
В 2017 году инженеры показали миру третью версию RoboBee, которая умеет выныривать из воды. Робот стал меньше по длине (2 см), но тяжелее в два раза (175 мг).
Результата удалось достичь с помощью новых элементов в конструкции, которые помогают роботу на каждом этапе выныривания:
- Робот плывет к поверхности и собирает воду в воздушное отделение.
- Электролитическая пластина преобразует воду в газ, который выталкивает робота из воды. Угловые поплавки помогают роботу стабилизироваться.
RoboBee вылетает из воды. Источник
Четвертая версия
Через два года разработчики выпустили последнюю на сегодняшний день версию RoboBee. Робот может летать без подключения ко внешним источникам питания.

RoboBee 4*. Источник
Инженеры добились компромисса между массой и мощностью. Они разместили на борту пчелы аккумулятор, электронику и солнечные батареи для подзарядки «на лету». Кроме того, была добавлена вторая пара крыльев. Это нужно для увеличения грузоподъемности робота. Новая версия весит около 259 мг.
Однако робот не приспособлен к работе в водной среде, как и третья версия не может работать автономно. Появится ли универсальная версия — открытый вопрос. Если получится, проект подойдет для разведки любых местностей и завалов.

Трехногий муравей DEAnsect
В некоторых задачах важно, чтобы робот мог выдержать, например, удар мухобойкой. DEAnsect, удар мухобойкой
На это способен эластичный робот DEAnsect, разработанный в 2019 году учеными из политехнического университета Лозанны. Вернее, инженеры выпустили две модели DEAnsect, одна из которых — эластичная.

Модели проекта
Модель с батарейкой
Робот с аккумулятором, микросхемой и фотодиодами, благодаря которым он может двигаться по начерченному узору.
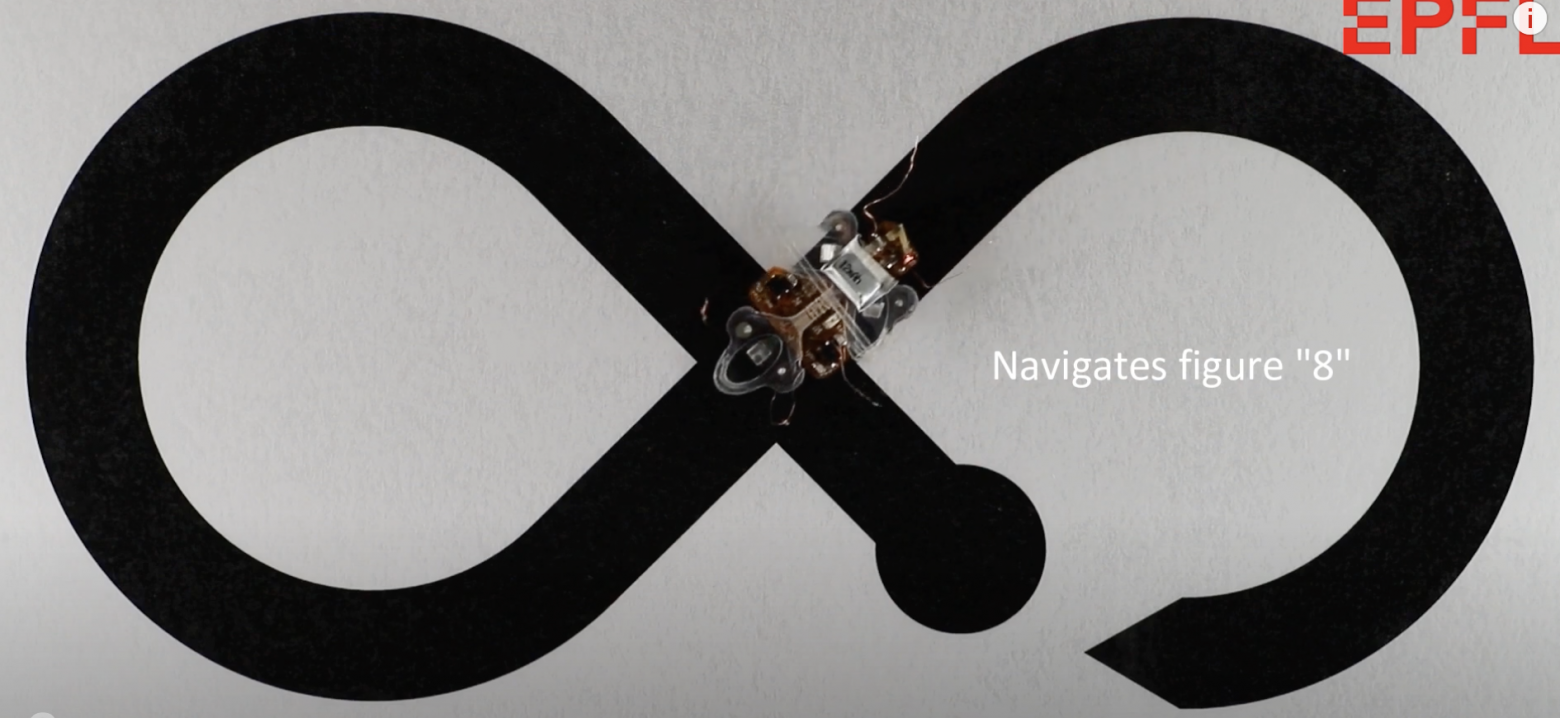
Движение DEAnsect по траектории. Источник
В автономном режиме DEAnsect 1* может работать до 14 минут. Длина робота составляет всего 40 мм, а масса — 190 мг.
Проводная, без платы и фотодиодов
DEAnsect 2* — более «живучая» модель, так как текстолитовое основание заменено на упругую диэлектрическую подложку. На робота можно даже наступить, и ему ничего не будет.
Устройство и движение
В основе устройства — искусственные мускулы из упругой диэлектрической мембраны (эластомера), которые заключены между парами гибких электродов. Механизм движения ножки DEAnsect
При подаче напряжения на электроды проводники притягиваются и стягивают мембраны. В результате мускулы вытягиваются и подтягивают за собой три ножки. При снятии напряжения мембраны возвращаются в исходное состояние, подтягивая уже тело к ножкам.

Толщина каждой из ножек не превышает 18 мкм. Это тоньше крыла стрекозы. Шаги у них соответствующие — всего 20 мкм.
Ученым удалось достичь скорости до 3 см/c. Для этого каждая ножка должна делать по 450 шагов в секунду.
Движение ножки DEAnsect
Необычная гусеница — Electrostatic crawler
В 2017 году группа исследователей из США и Китая представила робота, способного передвигаться под действием постоянного напряжения.
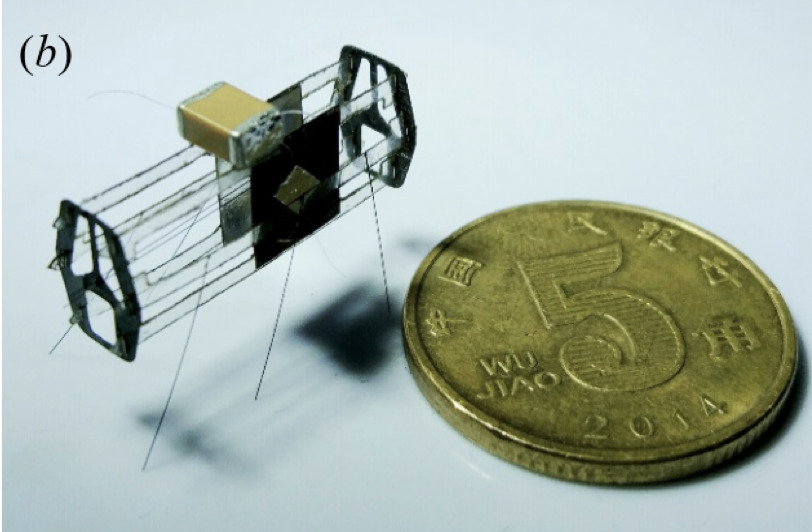
Робот всего 20 мм в длину, а его масса — 190 мг. Конструктивно он состоит из легкого пластикового корпуса, оснований из углеродного волокна, электродов, лапок, керамического конденсатора и консольной балки (проволоки).
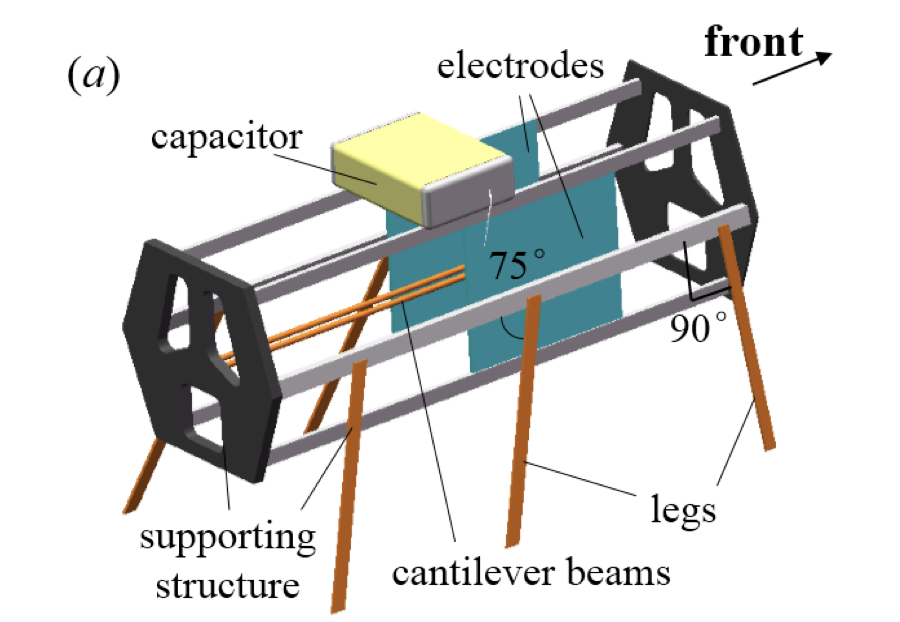
Электроды, конденсатор и проволока нужны в механизме автоколебаний, который «заставляет» гусеницу двигаться.
Возможно, эти тексты тоже вас заинтересуют:→ Модульные роботы: проекты, за которыми стоит следить
→ Малые ядерные реакторы как один из путей решения энергетического кризиса: NuScale все ближе к цели
→ Ноутбуки с гибкими экранами: реальные устройства и концепты, которые предлагают разные компании
Автоколебания и движение
К одному основанию прикреплена никель-титановая (NiTi) консольная балка (проволока), у нее есть свободные электроны. Сама проволока находится между электродными пластинами, которые заряжаются от конденсатора емкостью 10 нФ. Постепенно на электроды подается напряжение (3кВ) и пластины разноименно заряжаются.
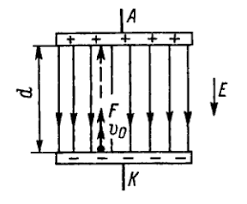
Электростатическое поле между анодом и катодом. Источник
Между электродными пластинами возникает напряжение и электрическое поле, которое «перемещает» проволоку со свободными электронами в сторону положительно заряженной пластины.
Коснувшись пластины, проволока «передает» на нее свободные электроны. Суммарный заряд проволоки становится положительным, а заряд пластины — «более нейтральным».
Теперь проволока двигается уже в сторону отрицательно заряженной пластины. При соприкосновении происходит то же самое. Стоит отметить, что конденсатор разряжается и компенсирует «похищенные» заряды на электродных пластинах.
Механизм автоколебаний микроконсоли подробно описан в отдельной статье.
В системе работает закон сохранения импульса. Когда проволока двигается, она изменяет суммарный импульс и отклоняет его от нуля.
Система стремится компенсировать отклонение, и робот начинает вращаться относительно задних ножек. Поворот происходит в стороны, противоположные направлениям движения проволоки. В результате гусеница движется по зигзагообразной траектории. Для наглядности покажем на схеме:

Робот может перемещаться со скоростью 2 мм/c в течение 10 секунд. Длительность жизненного цикла ограничивается лишь емкостью конденсатора. Если знаете менее массивные и более высокоемкие альтернативы керамического конденсатора — напишите в комментариях.
RoBeetle — жук на метаноле
Предыдущие проекты сильно зависели от электричества. Альтернативу предлагают изобретатели из Лаборатории автономных роботов Университета Южной Калифорнии, которые изобрели RoBeetle.
Это робот-жук, способный передвигаться более двух часов без внешних источников питания. Кроме того, робот получился небольшим, с массой 88 мг и длиной 15 мм.

RooBeetle. Источник
При чем здесь метанол
Долгосрочной автономности ученые добились с помощью жидкого топлива на метаноле, который питает искусственные мышцы из никель-титана.У сплава есть память формы. Мускулы растягиваются при нагреве и стягиваются при охлаждении. Также на поверхность мускул нанесен тонкий слой никеля.
На верхней стороне жука расположены отверстия, через которые испаряется метанол. Пары метанола при взаимодействии с нанесенным никелем приводят к окислению и нагреву никель-титановых проволок.
В результате мышца растягивается, вместе с ней движутся передние ноги RoBeetle. Одновременно с этим закрываются отверстия, через которые испаряется метанол. Проволока прекращает нагреваться и остывает, а мышца сокращается в обратную сторону и подтягивает за собой ноги с корпусом.
Движение робо-жука
Несмотря на то, что мышца нагревается за секунду до 100 ºС, она быстро охлаждается из-за небольших габаритов. Получается, чем быстрее нагрев и охлаждение мускулов, тем больше скорость передвижения RoBeetle.
Над чем стоит работать
Полный отказ от электроники — это преимущество и проклятие RoBeetle. Пока непонятно, как управлять роботом. Он умеет двигаться только вперед. Однако может нести на своих лапках груз массой 229 мг. Напомним, что сам робот весит 88 мг.
RooBeetle переносит груз. Источник
