Детский биоэлектрический протез. Часть 2
В конце прошлого года мы писали о наших планах по разработке детского биоэлектрического протеза. Подводим промежуточные итоги и делимся новой информацией.
1. Конструкция
2. Управление
3. Гильза
4. Дизайн
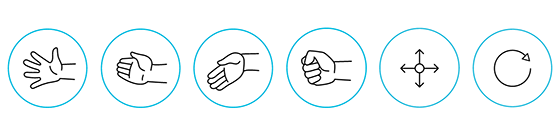
Мы начали с простого и доступного решения — однохватовая кисть с двумя мио-датчиками, которые распознают фантомное сжатие и разжатие кисти. Сила и скорость пропорциональны силе сигнала (т.н. пропорциональное управление).
Сила схвата 35 Н
Время полного раскрытия кисти 0,7 с
Ширина раскрытия кисти 44–62 мм
Ширина ладони 55–65 мм
Масса без оболочки с ротатором 155 г
Такой протез выполняет базовый функционал манипулятора. Можно держать достаточно тяжелые предметы, фиксировать схват и, в отличие от тягового протеза предплечья, нет необходимости в неестественных движениях локтя или плеча. Протез осуществляет схват в щепоть за счёт снятия электрического потенциала с мышц предплечья, пальцы двигаются вместе.
Более сложные модели — это многосхватные кисти. Можно выбирать жест и управлять пальцами по отдельности. Так работают современные биоэлектрические протезы BeBionic, ILimb, Michelangelo, Vincent, Taska, Keshen.
Детские размеры есть лишь у нескольких производителей, что связано с высокой стоимостью мотор-редукторов (нужны маленькие и мощные) и необходимостью частой замены по мере роста ребёнка. Средняя цена детского многосхватного протеза — €30 000. При этом международные исследования говорят о том, что чем раньше человек начинает пользоваться протезом, тем быстрее и проще проходит реабилитация и тем выше шанс, что протез будет использоваться в дальнейшем. Поэтому так важно развивать область детского протезирования.
Наша задача — сделать бионический детский протез доступным. После реализации модели однохватогово протеза, мы приступаем к созданию опытной серии детских многофункциональных биоэлектрических протезов. Проект поддержали Фонд Содействия Инновациям и Нейронет.
Стоит задача разработать предсерийный образец протеза и провести натурные испытания с 40 пользователями.
Чтобы каждый ребенок в России мог бесплатно и легко получить протез, обновляя его по мере роста, цена должна быть низкая, а функциональность и надежность — высокие.
Решение этой инженерной задачи требует нестандартных подходов как в железе, так и в процедурной стороне вопроса. Мы собираемся использовать самые дорогие микродвигатели, которые доступны на рынке — Maxon Motors. И для снижения конечной стоимости, предполагаем устанавливать мотор-редукторы повторно. То есть при замене протеза на вырост, старый будет разбираться и мотор-редукторы можно будет использовать для следующего протеза. Гарантийный срок службы Maxon — 10 лет. Эти же двигатели стоят сейчас в марсоходах и продемонстрировали свою надежность. «Оппортьюнити», который отправили на Марс в 2004 на три месяца, в 55 раз превысил запланированный срок своей работы, а «Кьюриосити«должен был закончить миссию ещё в 2014.
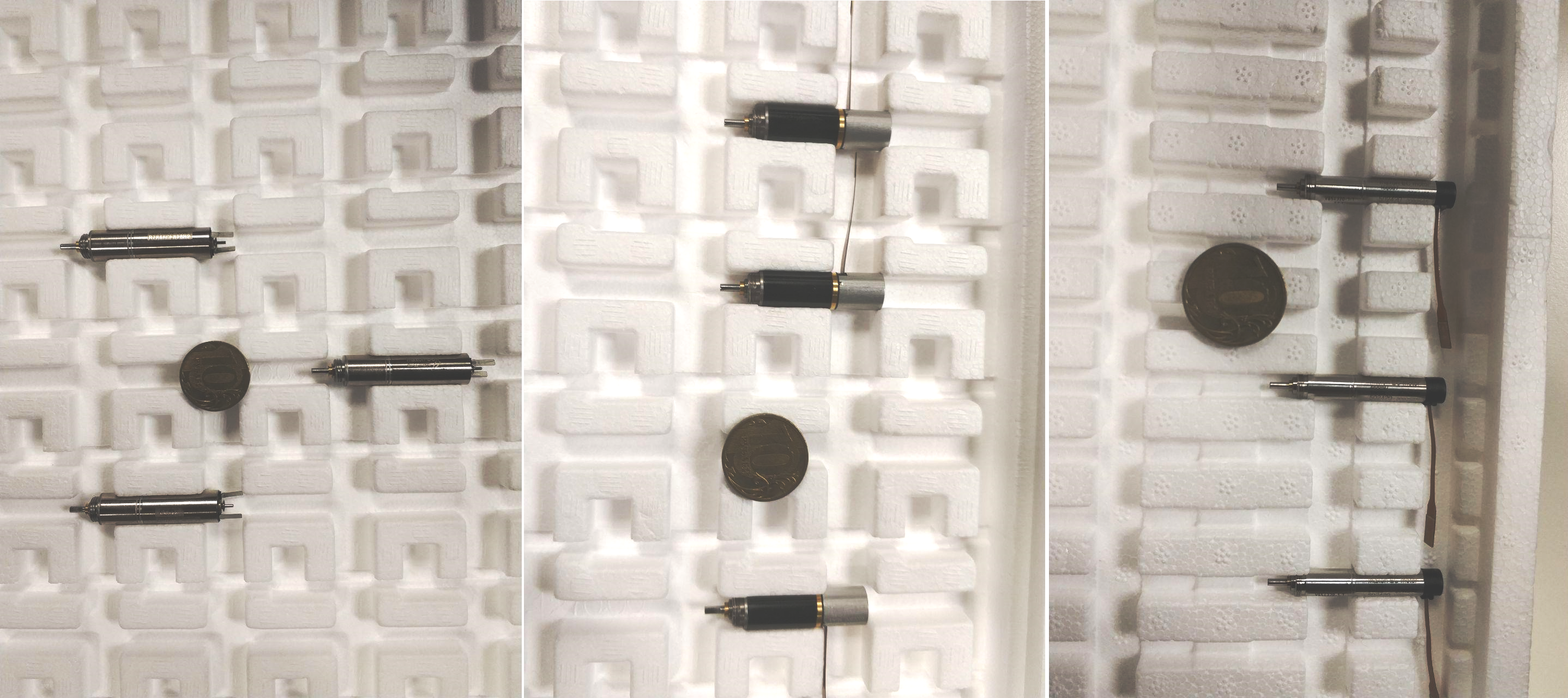
Микродвигатели Maxon
Конструкция
В прошлом году мы рассказывали о различных вариантах конструкции протеза — тентакли, четырехпалые кисти, барабанные палочки. Такие смелые решения импонируют нашей философии киборгизации и отвечают требованиям функциональности. Но антропоморфный вид универсален и предпочтителен большинству пользователей. Поэтому мы разрабатываем пятипалую робо-руку, напоминающую скорее перчатку супергероя. Необычные решения мы тоже обязательно реализуем в рамках fashion-проектов или коллаборации с крупными брендами.
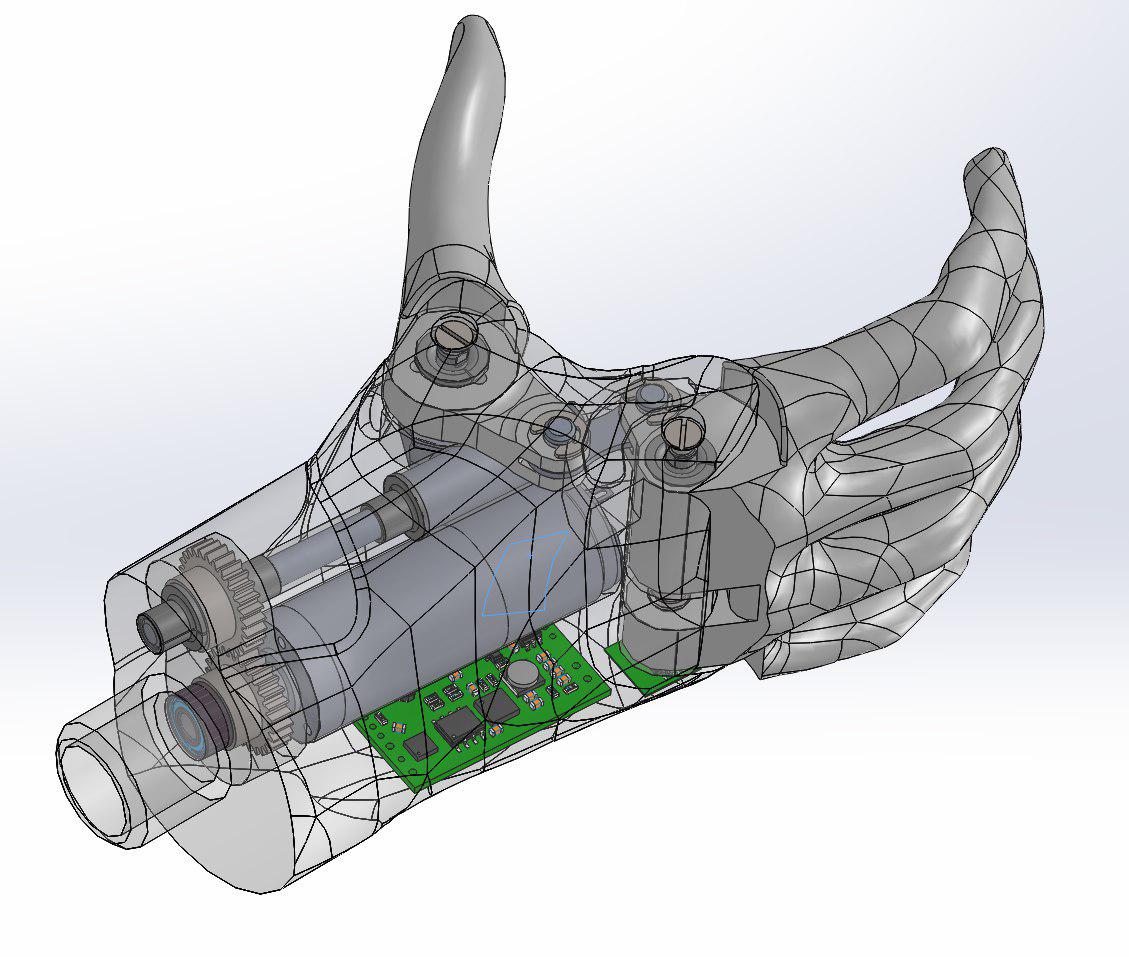
Для маленьких детей мы планируем делать протез с однофаланговыми пальцами. Это с одной стороны обеспечит бОльшую надежность, с другой это вынужденный шаг. На рынке просто нет необходимых по силовым и прочностным параметрам микроредукторов, которые бы могли поместиться в одну фалангу детского пальца.
Для данной конструкции подобраны оптимальные по техническим характеристикам двигатели, редукторы и червячные передачи наименьших габаритов. Расположение привода непосредственно в фалангах дает возможность реализовать протез, как всей кисти, так и для сложных травм при отсутствии нескольких пальцев.

1 — Геометрия пальца 2 — Двигатель (Maxon EC4, brushless); 3 — Редуктор (Maxon Planetary Gearhead); 4 — червячная передача (сустав); 5 — Двигатель (Maxon EC 6); 6 — Редуктор (Maxon Planetary Gearhead)
Как видно из верхнего рисунка, минимальный размер пальца составляет 42 мм. Это приблизительно соответствует возрасту ребенка от 2,5 лет.
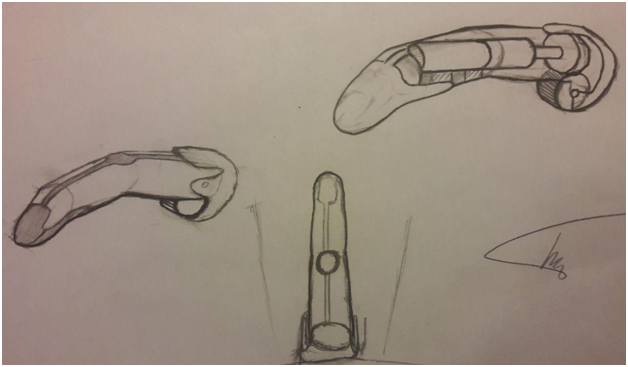
При длине пальца порядка 70 мм (приблизительно с 7 лет), может быть применена уже двухфаланговая конструкция.
Размещение двигателя в концевой фаланге (объединенной средней и дистальной фаланг) обусловлено соответствующим диаметром пальцев, возможностью удобного размещения связующей тяги, приводящей в движение проксимальную фалангу.
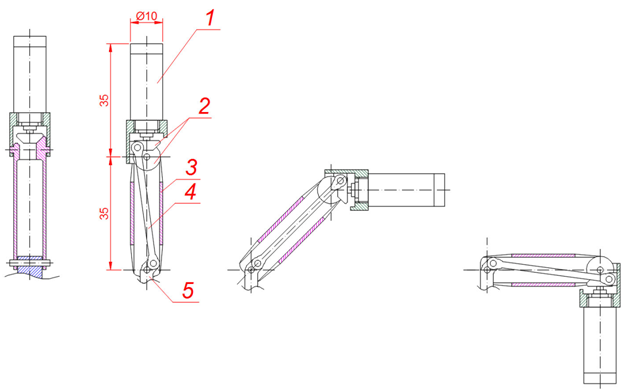
Принципиальная конструкция двухфалангового пальца:
1 — Мотор-редуктор (Двигатель: Maxon EC 10 flat; Редуктор: Maxon Planetary Gearhead); 2 — коническая передача (сустав); 3 — корпус проксимальной фаланги; 4 — тяга, приводящее в движение проксимальную фалангу; 5 — основание кисти (сустав)
Варианты исполнения двухфалангового пальца
При необходимости может быть применена комбинация однофоланговых и двухфаланговых пальцев.
Предварительная оценка момента на осях суставов составит 8,9 Н*см в однофаланговом пальце и 6,4 Н*см — в двухфаланговом (в суставе между концевой и проксимальной фалангами; в суставе между проксимальной фалангой и основанием кисти момент переменный, зависит от положения тяги). Время, необходимое для сжатия (разжатия) пальцев, составит порядка 0,3 секунды для однофалангового пальца и 0,7 секунды для двухфалангового. Масса представленных двигателей вместе с редуктором не превышает 10 г.
Третий вариант — это протез с запястным браслетом, где расположен микродвигатель. Это нестандартное решение, но применяемые в протезировании технологии практически не менялись на протяжении десятилетий. Область нуждается в экспериментах и модернизации.

Расположение в браслете не ограничивает мощность привода габаритами пальца. Это дает возможность обеспечить силу схвата, превосходящую компоновки с прочими вариантами расположения привода. Натяжение 5 гибких тяг обеспечивается с помощью мотор-редукторов, приводящих в действие винтовую передачу. Для минимальных размеров руки, мотор-редуктор Maxon состоит из редуктора GP 6 S c винтовой передачей и электродвигателя EC6. Диаметр мотор-редуктора составляет 6 мм.
Данную компоновку можно применять для запястий шириной от 24 мм, что соответствует возрасту 3–4 года. Максимальная сила, которую при этом может создать привод составляет 10 Н, таким образом можно обеспечить усилие на кончике пальца порядка 1–2Н для самых маленьких размеров. Недостатком компоновки является потеря энергии при преодолении сопротивления пружин, обеспечивающих разгибание пальца.
Управление
Управлять протезом можно с помощью: 1 — тяг; 2 — поверхностных мио-датчиков; 3 — вживления в мышечную ткань; 4 — считывания активности сенсомоторной коры головного мозга (через 7–8 лет).
- Механизм тяговых протезов довольно прост: согнул руку — сжались пальцы. Тяги можно настроить на движение кисти, локтя, плеча.
- Про мио-датчики расскажем ниже подробнее.
- Многообещающе выглядит инвазивное управление вкупе с возможностью посылать сигнал обратно по нервам для реализации «очувствления» протеза. Но отторжение материалов и сам метод инвиво пока не позволяют сделать инвазивные технологии общедоступными. Мы будем вести эксперименты совместно с ДВФУ в рамках проекта «Территория киборгов». На острове Русский создается специальная зона, где в упрощенном порядке можно регистрировать медицинские изделия в области инвазивной биоинженерии и на легальной основе устанавливать нейроимпланты.
- Нейроинтерфейсы существуют уже сейчас. Но их применение связано с рядом ограничений. Для управления протезом нужно либо идти опять же инвазивным путем, либо требовать от пользователя максимальной концентрации и отсутствия внешних раздражителей (в опытных образцах предлагается управление с закрытыми глазами). Поверхностное снятие сигналов расплывчато, не дает четкого результата и может быть использовано только в лабораторных условиях.
Миоэлектрические протезы с добавлением инерциальных сборок (гироскоп, акселерометр и магнитометр) — на сегодня наиболее выигрышный вариант управления.
Но с пятидесятых годов в них используется неудобное двуканальное или одноканальное управление. Все такие протезы работают с 2 или 1 датчиком, закрепленным на внутренней стороне гильзы протеза. Электроды регистрируют сигнал с мышц сгибателей и разгибателей. Управление и выбор жеста осуществляются либо по ступенчатому принципу, либо с использованием внешнего управления (механическое переключение/ выбор жеста на смартфоне/ распознавание протезом заранее размещенных на предметах RFID меток).

Система управления Touch bionics — мобильное приложение
Решение, которое лежало на поверхности — использовать больше датчиков.
В 2013 году проект Myo браслета от Thalmic Labs, с расположенными по кругу восемью ЭМГ сенсорами, собрал на Kickstarter 4 миллиона долларов и затем привлек инвестиции около 15 млн. В 2014 году Armin van Buuren с помощью этого браслета управлял световыми эффектами своего шоу.
Браслет понимает около 25–30 жестов, но ложное срабатывание и необходимость постоянной калибровки вынудили производителя остановиться на распознавании 5 жестов.
Весной на международной выставке протезирования и ортопедии — OTWorld 2018 сразу на 2 стендах были представлены протезы с большим количество ЭМГ датчиков внутри.

Компания Otto Bock продемонстрировала систему pattern recognition Myo Plus. В процессе калибровки задаются образцы мышечных движений, характерные для конкретных схватов. И затем, когда пользователь представляет определенный жест, Myo Plus обнаруживает соответствующие сигналы мышц и автоматически выполняет захват. Это делает управление протезом естественным и понятным. Два ЭМГ сенсора не могли справиться с этой задачей, и при наличии 20–25 вариантов расположения пальцев управлять можно было по сути только 2 «кнопками», переключая режимы по очереди.
Новая нативная система управления идеальна для детей. И именно ее мы хотим встроить в наши протезы. Но сама технология еще сырая, много ложных срабатываний, шумов, есть сложности в системе распознавания и обучения.
С этой мыслью мы разработали свои ЭМГ датчики. При большом количестве на рынке подобных изделий, все они не подходили под наши задачи по нескольким причинам:
1. Гелевые электроды большого размера. Нам нужны сухие и компактные.
2. Большие габариты модулей обработки сигнала.
3. Универсальность (могут снимать ЭМГ и ЭКГ сигналы), и как следствие, невысокая чувствительность
4. Высокая стоимость
Мы разработали более чувствительные ЭМГ-сенсоры, и следующим этапом будет использование матрицы таких сенсоров. Получение новых сигналов управления потребует двухстороннего обучения. Обучение человека заключается в выработке навыков формирования нужного паттерна ЭМГ сигналов, обучение машины — в умении распознавать такие паттерны с использованием нейросетевых алгоритмов. При этом программа управления каждым протезом будет автоматически корректироваться по мере обучения пользователя и робота. Мы продолжаем исследования и надеемся получить хороший результат уже в этом году.
Гильза
Производители под словом «протез» подразумевают обычно механизм кисти. Культеприемной гильзе не отводится много внимания, но от нее сильно зависит внешний вид и комфорт пользователя.

Гильза состоит из 2 слоев — внутреннего мягкого вкладыша из силикона или полиуретана и внешней жесткой несущей конструкции, выполненной из слоистых пластиков или карбона. Изготовление происходит индивидуально по слепку руки пользователя.

Внутри гильзы размещается аккумулятор. В случае когда места не хватает, аккумулятор выводят наружу в виде блока, что не совсем удобно и эстетично.
Интересный вариант — размещение гибкого аккумулятора между слоями культеприемной гильзы.

На поверхность гильзы выводятся кнопки включения, крышка для замены аккумулятора, иногда индикатор заряда. При этом гильзы получаются у всех разные.
Существуют гильзы скелетного типа, более лёгкие и удобные в использовании.
Также важным элементом протеза является лучезапястный шарнир. Его наличие придает руке естественный вид и улучшает удобство повседневного использования.
Для детей нужна ежегодная (часто 2 раза в год) замена гильзы. Существующая технология изготовления довольно трудоемкая и дорогостоящая. Мы рассматриваем варианты из совершенно других областей — изготовление кроссовок, крепления роликовых коньков, кнопка BOA на ботинках для сноуборда. Необходимо нестандартное, прорывное решение. Так, 5 лет назад, 3Д-печать позволила делать детали несерийно и изменила подход к детскому протезированию.
Возможны различные варианты — удешевление путем создания унифицированных внешних частей гильзы, скелетные гильзы с механизмом регулирования утяжки.
Мы ищем техников-протезистов, готовых к экспериментам и изготовлению большого количества протезов.
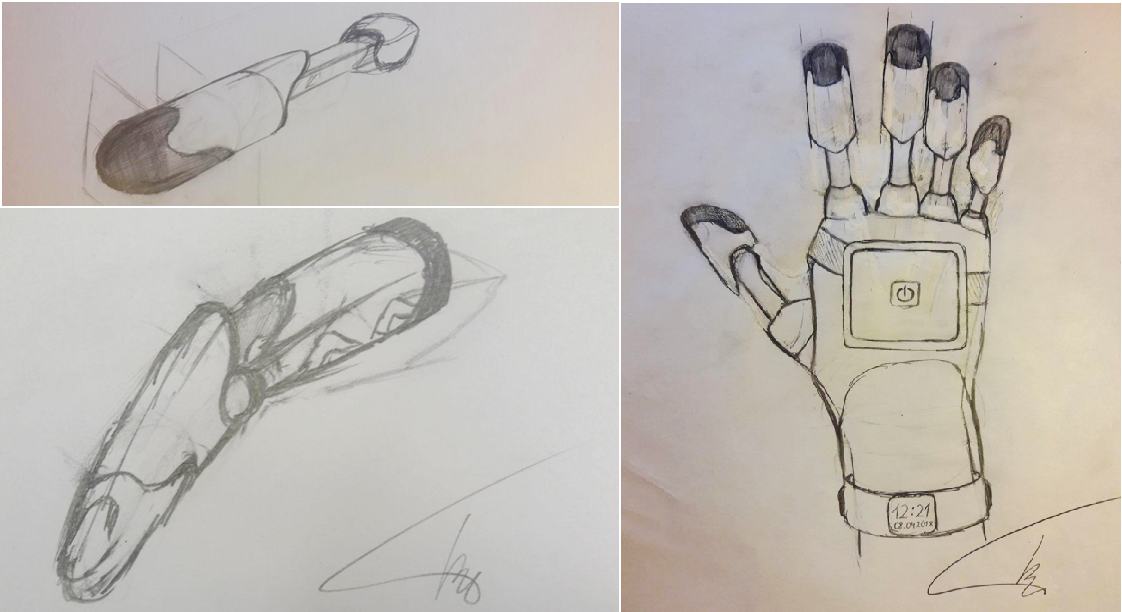
Дизайн
Конструкция представляет собой пятипалую кисть. Мы рассматриваем два основных пути в работе над дизайном. Можно сделать металлический скелет и поместить его в формообразующую оболочку.

Второй вариант — изначально делать конструкцию с корпусом.

Нам нужны ударопрочность, водонепроницаемость и простота в уходе вкупе с недорогим способом производства. Возможно, получится совместить оба варианта и дать возможность детям выбирать, как носить протез — в перчатке или без. Кроме того, такая вариативность поможет решить задачу о том, будет ли это яркая детская игрушка или минималистичный монохромный гаджет со встроенным функционалом смартфона — можно будет выбрать перчатку или сменные элементы.

Уже совсем скоро появятся первые 40 биоэлектрических протезов для детей.
С нативным управлением и возможностью выполнять различные жесты.
Современные, удобные, ударопрочные, водонепроницаемые, со встроенным функционалом смартфона и прочным каркасом из литых элементов.

Амбициозная задача
Многосхватная детская кисть — это неочевидное для рынка решение. И во многих смыслах неоправданное: протезы дорого стоят, нужна ежегодная замена по мере роста ребенка, и хрупкость протезов плохо сочетается с активным детским образом жизни.
Вместе с тем, реабилитологи настаивают на раннем протезировании, а исследования говорят о высоком проценте благоприятной адаптации к использованию биоэлектрического протеза детьми.
Отрасль нуждается в незашоренных головах безумных, но при этом профессиональных инженеров, чтобы преодолеть существующие барьеры и сделать возможным современное высокотехнологичное детское протезирование.
Если ты прочитал всю статью, прошел по ссылкам, нашел обе пасхалки на картинках и готов предложить неожиданное решение — похоже ты нам действительно нужен. На реализацию проекта у нас открыты вакансии для инженеров в совершенно разных областях. Конструкторы, программисты, протезисты, вам не захочется тратить время на что-то еще, кроме создания армии маленьких киборгов.

