[Перевод] Единый математический язык для физики и инженерного искусства в 21 веке
Введение
Сегодня, старшеклассников обучающихся по уровням А или их эквивалентам в естественных науках, познакомят с понятием векторов — направленных отрезков прямых, и научат манипулировать ими с помощью классической векторной алгебры. Фактически это алгебра, введенная Гиббсом в конце 19-го века; с тех пор она мало изменилась. Ученики практикуются в искусстве векторной алгебры и видят, насколько успешно она выражает большую часть двумерной и трехмерной геометрии. Манипулирование системой становится почти второй натурой.
 Уильям Роуэн Гамильтон 1805–1865. Изобретатель кватернионов и один из ключевых научных деятелей 19 века
Уильям Роуэн Гамильтон 1805–1865. Изобретатель кватернионов и один из ключевых научных деятелей 19 векаПонятное дело, что будет трудно отказаться от этой знакомой и, по-видимому, успешной системы в пользу новой алгебры (геометрической алгебры (ГА)), которая имеет дополнительные правила и нетрадиционные понятия. Однако, за умеренные затраты времени и усилий, вложенные в изучение ГА, наградой будет возможность получить в свое распоряжение инструмент, который позволяет пользователю проникать даже в самые мощные области современных научных исследований. По мере того, как мы переходим в 21-й век, мы достигли стадии, когда исследования в области физических наук часто специализируются в одной, как правило, очень ограниченной области. Тем не менее, всегда было так, что большие преимущества могут быть получены из взаимодействия между различными областями, что становится все более трудным, но все более желательным. Мы предполагаем, что в новом тысячелетии толчок к междисциплинарной деятельности возрастет во много раз. В следующих разделах мы попытаемся дать читателю некоторые доказательства того, что ГА может быть лучшей надеждой на достижение цели унификации математического языка для современной науки.
Немного истории
Многих выдающихся математиков начала 19-го века занимал вопрос заключавшийся в том, как лучше всего математически представить вращения в трех измерениях, то есть в обычном пространстве. Гамильтон провел большую часть своей жизни, работая над этой проблемой, и в конце концов создал кватернионы, которые были обобщением комплексных чисел. Алгебра содержит четыре элемента и правило

Хотя элементы i, j, k часто называют векторами, позже мы увидим, что они не обладают свойствами векторов. Несмотря на очевидную полезность кватернионов, всегда существовала небольшая загадка и путаница в их природе и использовании. Сегодня кватернионы все еще используются для представления трехмерных вращений во многих областях, поскольку признано, что они являются очень эффективным способом выполнения таких операций. Однако путаница все еще сохраняется, и глубокое и детальное понимание кватернионов было потеряно для целого поколения.
 Герман Гюнтер Грассман (1809–1877). Немецкий математик и школьный учитель, прославившийся алгеброй, которая теперь носит его имя
Герман Гюнтер Грассман (1809–1877). Немецкий математик и школьный учитель, прославившийся алгеброй, которая теперь носит его имяВ то время как Гамильтон разрабатывал свою кватернионную алгебру, Грассман формулировал свою собственную алгебру, ключом к которой было введение внешнего произведения; мы обозначаем это внешнее произведение как ∧, так что внешнее произведение двух векторов a и b записывается как a∧b. Это произведение имеет определенные особенности. Одной из таких особенностей является его ассоциативность, т. е.

То, как мы группируем множители, не имеет значения. Другая особенность — антикоммутативность, то есть, если мы изменим порядок векторов во внешнем произведении, то изменим его знак:

Мы больше привыкли иметь дело с коммутативным произведением, то есть умножением между двумя числами, 2×5 = 5×2 = 10, но оказывается чрезвычайно полезным во многих областях физики, математики и техники иметь произведение, которое не обязательно коммутирует. Напротив, внутреннее (скалярное) произведение между двумя векторами, a и b, записанное как a ⋅ b (что дает скаляр, величина которого равна ab cos θ, где θ — угол между векторами), является коммутативным, т. е.

Грассман, немецкий школьный учитель, был в значительной степени проигнорирован при жизни, но после его смерти его работа стимулировала модные области дифференциальных форм и грассмановских (антикоммутирующих) переменных. Последние имеют фундаментальное значение для основ современной суперсимметрии и теории суперструн.
 Портрет Уильяма Кингдона Клиффорда (1845–1879), математика и философа, работы достопочтенного Дж. Джон Кольер. (Библиотека и архив Королевского общества.)
Портрет Уильяма Кингдона Клиффорда (1845–1879), математика и философа, работы достопочтенного Дж. Джон Кольер. (Библиотека и архив Королевского общества.)Следующий решающий этап истории происходит в 1878 году и связан с работой английского математика Уильяма Кингдона Клиффорда. Клиффорд был одним из немногих математиков, которые читали и понимали работу Грассмана, и в попытке объединить алгебры Гамильтона и Грассмана в единую структуру он ввел свою собственную геометрическую алгебру. В этой алгебре мы имеем одно геометрическое произведение, образованное объединением внутреннего и внешнего произведений; оно ассоциативно, как произведение Грассмана, но также обратимо, как произведения в алгебре Гамильтона. В геометрической алгебре Клиффорда уравнение типа ab = C имеет решение b = a⁻¹C, где a⁻¹ существует и известно как обратное от a. Ни внутреннее, ни внешнее произведение не обладают этой обратимостью сами по себе. Большая часть силы геометрической алгебры заключается в этом свойстве обратимости.
Алгебра Клиффорда объединила все преимущества кватернионов с преимуществами векторной геометрии, так что геометрическая алгебра должна была тогда идти вперед как основная система математической физики. Однако два события помешали этому. Первой была безвременная смерть Клиффорда в возрасте всего 34 лет, а второй — введение Гиббсом своего векторного исчисления. Векторное исчисление хорошо подходило к теории электромагнетизма в том виде, в каком она существовала в конце XIX века; это, а также значительная репутация Гиббса, привели к тому, что его система затмила работу Клиффорда и Грассмана. Ирония заключается в том, что сам Гиббс, похоже, был убежден, что подход Грассмана к множественным алгебрам был правильным.
С появлением специальной теории относительности физики поняли, что им нужна система, способная обрабатывать четырехмерное пространство, но к этому времени важнейшие идеи Грассмана и Клиффорда уже давно затерялись в бумагах конца 19-го века. В 1920-х годах алгебра Клиффорда вновь появилась как алгебра, лежащая в основе квантового спина. В частности, алгебра спиновых матриц Паули и Дирака стала незаменимой в квантовой теории. Однако к ним относились просто как к алгебрам: геометрический смысл был утрачен. Соответственно, мы будем использовать термин «алгебры Клиффорда», когда он используется исключительно в формальной алгебре. Говоря же о геометрической постановке, мы используем название данное Клиффордом — геометрическая алгебра. Это также уступка Грассману, который фактически первым записал геометрическое (клиффордовское) произведение!
Ситуация оставалась в значительной степени неизменной до 1960-х годов, когда Дэвид Хестенес начал восстанавливать геометрический смысл алгебр Паули и Дирака. Хотя его первоначальная мотивация состояла в том, чтобы получить некоторое представление о природе квантовой механики, он очень скоро понял, что при правильном применении система Клиффорда была не чем иным, как универсальным языком для математики, физики и инженерии. Опять же, эта замечательная работа в значительной степени игнорировалась около 20 лет, но сегодня интерес к системе Гестенеса набирает обороты. В настоящее время во всем мире существует множество групп, работающих над применением геометрической алгебры к таким различным темам, как черные дыры и космология, квантовое туннелирование и квантовая теория поля, динамика пучков и дефформации, компьютерное зрение и робототехника, свертывание белков, нейронные сети и автоматизированное проектирование. Во всем используется одна и та же алгебраическая система, позволяющая людям одновременно вносить вклад в ряд этих областей
Краткий обзор
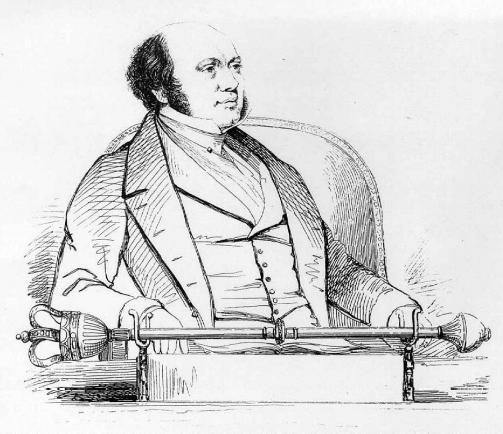
В нашей геометрической алгебре мы начинаем со скаляров, то есть обычных чисел, которые имеют величину, но не связаны с ориентацией, и векторов, то есть направленных отрезков как с величиной, так и с ориентацией/направлением. Давайте теперь возьмем эти векторы и посмотрим немного более внимательно на геометрию, лежащую за внешним произведением Грассмана. Внешнее произведение между двумя векторами a и b записывается как a∧b и представляет собой новую величину, называемую бивектором. Бивектор a∧b — это направленная область, охватываемая двумя векторами a и b; таким образом, внешнее произведение двух векторов является новой математической сущностью, кодирующей понятие ориентированной плоскости.
Если мы пронесем b вдоль а, то получим тот же бивектор, но с противоположным знаком (ориентацией). Теперь, расширяя эту идею, мы видим, что внешнее произведение между тремя векторами, a∧b∧с, получается путем выметания бивектора a∧b вдоль c, что дает ориентированный объем или тривектор. Если мы пронесем a через область, представленную бивектором b∧с, мы получим тот же самый тривектор (можно показать, что он имеет ту же самую «ориентацию»); этот факт выражает ассоциативность внешнего произведения.
В n-мерном пространстве у нас будут n-векторы, которые являются просто ориентированными n-объемами; таким образом, мы видим, что внешнее произведение легко обобщается на более высокие измерения, в отличие от векторного произведения Гиббса, которое ограничено тремя измерениями. Решающий шаг в развитии геометрической алгебры теперь происходит с введением геометрического произведения. Мы уже знаем, что такое a ⋅ b и a∧b; геометрическое произведение же их объединяет:

Этот шаг суммирования двух различных объектов не является совершенно чуждым актом; на самом деле мы уже давно делаем то же самое при выполнении операций с комплексными числами. Оказывается, что многие величины в физике могут быть выражены очень сжато и эффективно в терминах мультивекторов (линейные комбинации n-векторов, например скаляр плюс бивектор и т. д.); действительно, такое объединение объектов разных типов, по-видимому, происходит на глубоком уровне физической теории.
Геометрическая алгебра в двух измерениях
В двух измерениях (на плоскости) любая точка может быть достигнута путем принятия различных линейных комбинаций двух векторов с различными направлениями; мы говорим, что пространство тогда охватывается этими двумя базисными векторами. Теперь пусть эти два вектора ортонормированы, т. е. единичной длины и перпендикулярные друг другу, и назовем их e₁ и e₂. Или на языке формул

Единственным новым элементом в нашей двумерной геометрической алгебре является бивектор e₁ ∧ e₂; это самый высокий класс элемента в алгебре (часто называемый псевдоскаляром). Рассмотрим теперь свойства этого бивектора. Первое, на что следует обратить внимание

то есть геометрическое произведение является чистым бивектором, потому что перпендикулярность векторов гарантирует, что e₁ ⋅ e₂ обращается в нуль. Теперь давайте разберем этот бивектор:

Обратите внимание, что у нас есть реальная геометрическая величина, которая в квадрате равна -1! Поэтому возникает соблазн связать эту величину с единицей мнимой комплексной системы счисления (комплексное число принимает форму x + iy, где i известна как мнимая единица и обладает свойством i² = -1). Таким образом, в двух измерениях геометрическая алгебра воспроизводит свойства комплексных чисел, но использует только геометрические объекты. На самом деле, переходя к геометрическим алгебрам более высоких измерений, мы начинаем видеть, что есть много объектов, которые квадратичны к -1, и что мы можем использовать их все в их правильной геометрической постановке.
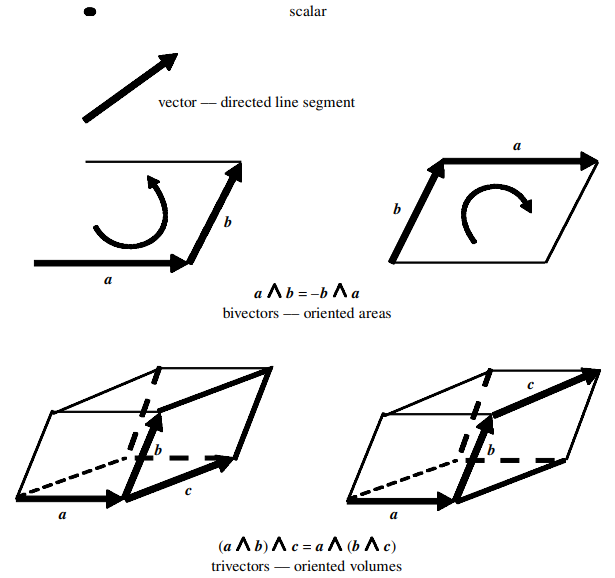
Давайте теперь посмотрим, что происходит, когда бивектор e₁e₂ умножается на векторы слева и справа. Умножение e₁ и e₂ слева дает

Легко заметить, что умножение слева на бивектор вращает векторы на 90° по часовой стрелке. Точно так же, если мы умножаем справа, мы вращаемся на 90° против часовой стрелки

Вращения
Из свойств бивектора e₁e₂ очень легко показать, что поворот вектора a на угол θ к вектору a' достигается уравнением

где R — величина, которую мы будем называть ротором и которая состоит из суммы скаляра и бивектора

а P — это то же самое выражение, но с »+». На первый взгляд это может показаться довольно громоздким выражением для выполнения простого двумерного вращения; однако оказывается, что оно обобщается на более высокие измерения и поэтому обладает огромной силой.
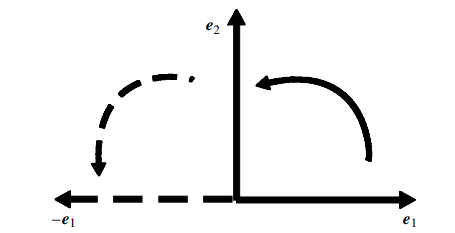
 Ротор R, переводящий вектор a в вектор a'. Обратите внимание, что понятие перпендикулярного вектора больше не требуется; важен бивектор или плоскость вращения.
Ротор R, переводящий вектор a в вектор a'. Обратите внимание, что понятие перпендикулярного вектора больше не требуется; важен бивектор или плоскость вращения.Приведенное выше уравнение фактически является формулой, которая используется для вращения вектора в любом измерении; если мы перейдем к трем измерениям, ротор R будет вращаться на угол в плоскости, описываемой бивектором. Поэтому все, что нам нужно сделать, это заменить бивектор e₁e₂ на бивектор, который определяет плоскость вращения. И все; используя это очень простое выражение, мы обнаружим, что можем вращать не только векторы, но и бивекторы и более высокоуровневые величины. Осуществить вращение в трех измерениях таким образом, чтобы расширить понятия, которые мы понимали в двух измерениях, было проблемой, с которой Гамильтон боролся в течение многих лет, прежде чем, наконец, получить в качестве своего решения кватернионы. На самом деле элементы кватернионной алгебры Гамильтона — это не что иное, как элементарные бивекторы (плоскости). Вооружившись очень простой идеей ротора, который совершает вращения, мы можем дать удивительно простые геометрические интерпретации многих других сложных объектов.
Специальная теория относительности
Специальная теория относительности была введена в 1905 году и возвестила начало новой эры в физике; отход от чисто классического режима ньютоновской физики. В специальной теории относительности (СТО) мы имеем дело с четырехмерным пространством: тремя измерениями обычного евклидова пространства и временем. Предположим, что у нас есть стационарный наблюдатель, с которым мы можем связать координаты пространства и времени, и этот наблюдатель будет наблюдать события со своего пространственно-временного положения. Теперь предположим, что у нас есть другой наблюдатель, движущийся со скоростью v; он тоже будет наблюдать события из своего непрерывно меняющегося пространственно-временного положения.
Проблема того, как два наблюдателя воспринимают различные события, относительно проста, когда скорость |v| мала. Но когда |v| приближается к скорости света, c, и мы добавляем тот факт, что она должна быть постоянной в любой системе, и математика становится уже не такой простой. Условно можно получить преобразование координат между системами отсчета обоих наблюдателей, и для перемещения между этими двумя системами мы применяем матричное преобразование, известное как преобразование Лоренца. Геометрическая алгебра дает нам прекрасно простой способ работы со специальными релятивистскими преобразованиями, используя не что иное, как формулу для вращений, рассмотренную выше, а именно a' = RaP. Наше пространство теперь имеет четыре измерения, и наши базисные векторы — это три пространственных направления и одно временное направление; назовем эти базисные векторы γ₀, γ₁, γ₂ и γ₃. Для четырех измерений, у нас будет шесть бивекторов (три пространственных бивектора плюс бивекторы, состоящие из пространственно-временных «плоскостей»).
 Иллюстрация четырехмерных пространственно-временных осей. Показан один из пространственно-временных бивекторов, который, как и прежде, определяет плоскость в нашем пространстве и поэтому может быть использован для вращения осей.
Иллюстрация четырехмерных пространственно-временных осей. Показан один из пространственно-временных бивекторов, который, как и прежде, определяет плоскость в нашем пространстве и поэтому может быть использован для вращения осей.Преобразование Лоренца оказывается просто ротором R, который переводит ось времени в другое положение в четырех измерениях: Rγ₀P. Таким образом, элегантным бескоординатным способом мы можем придать преобразованиям СТО интуитивный геометрический смысл. Все обычные результаты СТО совершенно естественно следуют из этой отправной точки. Например, сложные формулы для преобразования электрического (Е) и магнитного (В) полей при лоренцевом ускорении заменяются (гораздо более простым!) результатом

где I = γ₀γ₁γ₂γ₃ — псевдоскаляр четырехмерного пространства (4-объем), а штрихами обозначаем преобразованные величины.
Квантовая механика
В нерелятивистской квантовой механике существуют важные величины, известные как спиноры Паули; используя эти спиноры, мы можем записать уравнение Паули, которое управляет поведением квантово-механического состояния в некотором внешнем поле. Уравнение включает в себя величины, называемые спиновыми операторами, которые обычно рассматриваются как совершенно разные сущности для состояний. Используя трехмерную геометрическую алгебру, мы можем записать эквивалент уравнения Паули, в котором операторы и состояния являются мультивекторами реального пространства; действительно, спиноры становятся роторами того типа, о котором мы говорили ранее.
К тому же, переход к релятивистской квантовой механике будет сравнительно прост. Условно она описывается алгеброй Дирака, где уравнение Дирака говорит нам о состоянии частицы во внешнем поле. На этот раз мы используем четырехмерную геометрическую алгебру пространства-времени, и снова волновая функция в обычной квантовой механике становится инструкцией по вращению базисного набора осей и выравниванию их в определенных направлениях: аналогично теории механики твердого тела! Простота такого подхода имеет некоторые интересные последствия. При решении уравнения Дирака для некоторого внешнего потенциала А, видя, куда повернута временная ось γ₀, мы можем построить линии тока (линии, которые дают направление скорости частицы в каждой точке) движения частицы. Сравнение с общепринятой теорией можно проиллюстрировать простым примером.
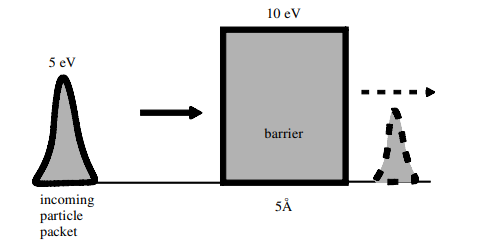
Рассмотрим случай, когда пакет частиц с энергией, скажем, 5 эВ сталкивается с прямоугольным барьером — потенциалом высотой 10 эВ и конечной шириной, скажем, 5 Ангстрем. Теория квантовой механики позволяет предсказать, что, несмотря на кажущийся непроницаемым барьер, часть пакета действительно возникает с другой стороны. Эффект называется туннелированием, и он имеет фундаментальное значение во многих современных полупроводниковых приборах. Однако, когда мы задаем кажущийся очевидным вопрос о том, сколько времени туннелирующая частица проводит внутри барьера, квантовая теория дает нам множество ответов:
такое не обсуждается, поскольку время не является эрмитовой наблюдаемой;
время тождественно нулю;
время является мнимым.
Почему квантовая механика делает такие странные предсказания? Основная причина неспособности иметь дело с траекторией частицы/пакета внутри барьера заключается в использовании i, неинтерпретированного мнимого скаляра (i² = -1); обычно импульс частицы внутри барьера принимается кратным i, и это приводит ко всяким довольно бесполезным представлениям о мнимом времени.
Однако подход геометрической алгебры говорит нам, что мы должны построить линии тока, представляющие путь частицы внутри барьера, и, следовательно, найти, сколько времени они действительно проводят внутри барьера. Скорее всего, в ближайшем будущем можно будет сравнить время, данное этой теорией, со временем, измеренным в реальных экспериментах. (Это будущее уже наступает — прим. перев.)

На рисунке изображены предсказанные линии тока частиц, начинающих движение из различных позиций внутри волнового пакета энергии 5 эВ, падающего на барьер высотой 10 эВ и шириной 5 Ангстрем, как показано выше. Здесь видно, что линии потока частиц замедляются, находясь в барьере. Это контрастирует с некоторыми недавними обсуждениями сверхсветовых скоростей внутри таких барьеров, которые были выведены из экспериментально наблюдаемого факта, что частицы, туннелирующие через барьер, достигают цели раньше, чем те, которые проходят эквивалентное расстояние в свободном пространстве. Это кажущееся противоречие объясняется здесь тем, что именно частицы вблизи фронта волнового пакета, которые уже имеют фору, передаются и способны достичь цели. Интересно отметить, что большая часть модной в настоящее время области квантовой космологии основана на понятиях мнимого времени.
Гравитация
Электромагнетизм — это калибровочная теория. Калибровочная теория возникает, если мы оговариваем, что глобальные симметрии должны также стать локальными симметриями (в электромагнетизме эти симметрии называются фазовыми вращениями); цена, которую нужно заплатить, чтобы достичь этого, — это введение сил. В геометрической алгебре гравитацию также можно рассматривать как калибровочную теорию, и здесь симметрии гораздо легче понять. Предположим, что мы требуем, чтобы физика во всех точках пространства-времени была инвариантна при произвольных локальных перемещениях и вращениях (вспомним, что под вращениями в четырех измерениях мы подразумеваем лоренцевы преобразования); калибровочное поле, которое вытекает из такого требования, является гравитационным полем.
Следствием этой теории является огромное упрощение возможности обсуждать гравитацию целиком на плоском пространственно-временном фоне. Нет необходимости в сложных понятиях искривленного пространства-времени, которые мы все привыкли связывать с общей теорией относительности Эйнштейна. Именно здесь подход ГА отличается от прошлых подходов калибровочной теории к гравитации, где эти прошлые теории все еще сохраняли идеи искривленного пространственно-временного фона. Локально гауссова калибровочная теория гравитации воспроизводит все результаты общей теории относительности, но глобально эти две теории будут отличаться, когда речь зайдет о топологии. Например, всякий раз, когда обсуждаются сингулярности или горизонты (как в случае с черными дырами), теория ГА может давать различные предсказания обычной ОТО. Некоторые усовершенствованные методы решения, работающие исключительно с физическими величинами, также были найдены в ГА. Калибровочная теория гравитации ГА имеет дело с экстремальными полями (то есть полями, в которых возникают сингулярности) иначе, чем ОТО. Эти особенности рассматриваются просто способом, аналогичным тому, который используется в электромагнетизме (с использованием интегральных теорем). Взаимодействие с квантовыми полями также отличается и предлагает альтернативный путь к квантовой теории гравитации. В этом контексте интересно также отметить, что многие другие модные попытки объединить гравитацию и квантовую теорию (твисторы, супергравитация, суперструны) также естественным образом вписываются в рамки ГА.
Стержни, оболочки и прогибающиеся балки
Геометрическая алгебра полезна не только в области фундаментальной физики. Концепция системы отсчета, изменяющейся в пространстве или во времени (или и в том, и в другом), лежит в основе многих работ, направленных на понимание деформирующихся тел. Возьмем в качестве простого примера однородную балку, которая подвергается некоторой нагрузке по своей длине; свойства балки и нагрузки будут определять, как она деформируется.
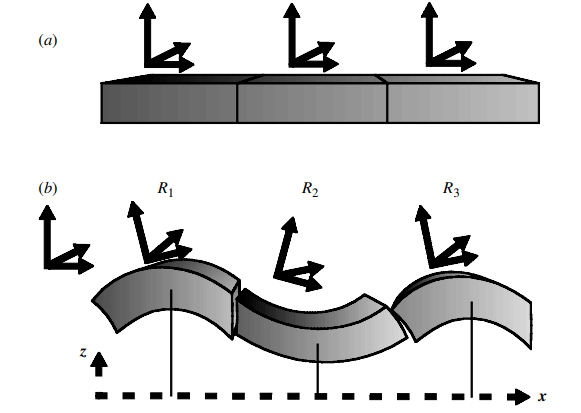
Математически мы можем описать деформацию, разделив балку на очень маленькие сегменты и прикрепив системы координат (три взаимно перпендикулярные оси) к центру масс каждого сегмента. Первоначально, при отсутствии нагрузки и кручения, мы ожидаем, что начало координат каждого набора осей будет находиться вдоль осевой линии балки и что каждая система отсчета будет выровнена так, что ось x будет направлена вдоль длины балки, а ось z — вертикально вверх. Теперь, когда луч деформируется, мы можем описать его положение в данный момент времени, указав положение начала координат и ориентацию рамки для каждого сегмента.
Предположим, что у нас есть неподвижная система отсчета на одном конце балки. Тогда система координат на сегменте i будет связана с ней некоторым ротором, Rᵢ. Таким образом, при движении вдоль балки ориентации описываются ротором, изменяющимся с расстоянием x. Для заданной нагрузки и заданных граничных условий можно было бы решить задачу для роторов, чтобы получить информацию о свойствах изгиба балки. Условно эта задача была выполнена с использованием различных средств кодирования вращений: углов Эйлера, параметров вращения, направляющих косинусов, матриц вращения и т. д. Преимущество использования роторов двоякое: во-первых, они автоматически имеют правильное число степеней свободы (три), в отличие, например, от направляющих косинусов (где у нас девять параметров, только три из которых независимы), а во-вторых, мы можем эффективно решать полные уравнения (без аппроксимаций).
Эту идею варьирования фреймов можно развить еще на одну ступень. Сегодня большая часть исследований в области современной строительной механики стала прерогативой математика. Чтобы иметь дело с тонкими структурами, такими как стержни и оболочки, где при деформации структура поверхности может быть довольно сложной, люди увидели, что области математики, такие как дифференциальная геометрия и дифференциальная топология, могут предоставить полезные инструменты. Действительно, большая часть конечно-элементного кода, используемого сегодня в стандартных конструкторских пакетах, написана на основе алгоритмов, основанных на этой математике. В результате, однако, многие инженеры больше не могут понять работу таких пакетов и должны считать само собой разумеющимся, что то, что они используют, является правильным. С другой стороны, при использовании геометрической алгебры, задача снова сводится к тому, чтобы работать с роторами, которые могут изменяться во времени и/или пространстве на любой заданной поверхности; математика не сложнее, чем можно было бы использовать для решения простых задач механики. Таким образом, внутренний конечно-элементный код становится доступным для инженеров с возможностью его модификации.
Компьютерное зрение и анализ движения
Компьютерное зрение — это, по сути, искусство реконструировать или выводить вещи о реальном трехмерном мире из представлений о сцене, снятых одной или несколькими камерами. Положение и ориентация камер могут быть известны, а могут и не быть известны, и внутренние параметры камер (которые определяют, насколько изображения, которые мы видим, отличаются от тех, которые были бы результатом идеальной проекции на плоскость изображения) также могут быть неизвестны. Из этого довольно упрощенного описания видно, что будет задействовано значительное количество трехмерной геометрии. Фактически, с середины 1980-х годов большая часть компьютерного зрения была написана на языке проективной геометрии.
В классической проективной геометрии мы определяем трехмерное пространство, точки которого соотносятся линиям проходящим через некоторое начало координат (заданную точку) в четырехмерном пространстве. Использующая такую систему алгебра инцидентности (пересечения линий, плоскостей и т. д.) чрезвычайно изящна, и, кроме того, преобразования, которые кажутся сложными в трех измерениях (например, проекция точек, линий и т. д. вниз на данную плоскость), теперь становятся простыми. В последние годы люди начали использовать алгебру, называемую алгеброй Грассмана-Кэли для проективных геометрических вычислений и манипуляций; это фактически внешняя алгебра Грассмана, поскольку она ограничивает себя использованием только внешнего произведения. Геометрическая алгебра содержит внешнюю алгебру как подмножество и, следовательно, является идеальным языком для выражения всех идей проективной геометрии. Однако у ГА также есть понятие внутреннего произведения, часто позволяющее нам делать вещи, которые были бы очень трудными при наличии только внешнего произведения.
Чтобы проиллюстрировать еще один способ использования геометрической алгебры в компьютерном зрении, рассмотрим задачу, возникающую при анализе движения, при реконструкции сцены и регистрации изображения (мозаика ряда различных, перекрывающихся изображений при наличии ограниченной информации). Предположим, что у нас есть несколько камер, наблюдающих за объектом. Также предположим, для удобства, что маркеры размещены на объекте так, чтобы эти точки можно было легко извлечь из изображений.
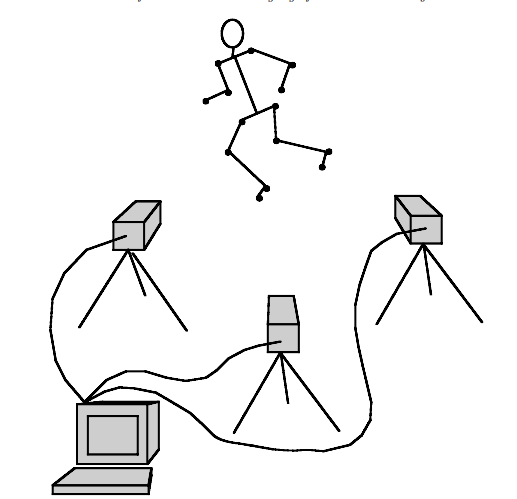
На рисунке показан эскиз системы с тремя камерами. Теперь, если мы наблюдаем сцену, скажем, с помощью M камер, мы обнаружим, что в каждой паре камер есть подмножество общего числа маркеров, которые видны. Первая задача состоит в том, чтобы найти, используя эти М изображений, наилучшие оценки относительных положений и ориентаций каждой камеры. Как только мы узнаем положение камер, мы хотели бы провести триангуляцию, чтобы найти трехмерные координаты других точек мира, видимых на ряде изображений; эти задачи не слишком сложны для точно известных точек изображения, но становятся намного сложнее, если эти точки зашумлены. Конечно, существуют общепринятые методы решения этих проблем.
Действительно, фотограмметристы делают именно это в течение многих лет. Однако решения, как правило, требуют больших оптимизаций, которые часто нестабильны. Вот тут-то и может помочь геометрическая алгебра. Используя ГА, можно решить как калибровочные, так и триангуляционные задачи таким образом, чтобы одновременно учитывать все данные с каждой камеры. Оптимизации, участвующие в решениях, способны использовать как первую, так и вторую аналитическую (в отличие от численной) производную всех величин, которые должны быть оценены согласованным образом. Обычно гораздо сложнее взять производные от величин, представляющих вращения. Используя ГА таким образом, можно получить точные решения при одновременном снижении вычислительной нагрузки, что делает его полезным в приложениях, требующих множества таких оптимизаций.
Выводы
Мы попытались дать краткое введение в математическую систему, которую мы называем геометрической алгеброй, и проиллюстрировать ее полезность в различных областях. Хотя мы обсуждали целый ряд тем от квантовой механики до изгибающихся балок, есть много убедительных примеров использования ГА в физике и технике, которые мы не обсуждали. К ним относятся электромагнетизм, поляризация, геометрическое моделирование и линейная алгебра. Современные инструменты математики, с которыми большинство из нас знакомо, разнообразны и сложны. За о
