Ученые создали сенсорную «кожу» из силикона для мягких роботов
Разработчики мягкой робототехники берут в пример ткани живых организмов, чтобы создавать гибких и адаптируемых роботов для работы с людьми или, например, в медицине. Традиционные методы управления роботами — системы из нескольких камер захвата движения. Но они не пригодны для мягких роботов в условиях реального мира из-за своей жесткой структуры.
Ученые из Массачусетского технологического института (MIT) придумали, как можно решить проблему датчиков пространства, которые сложно сделать такими же податливыми, как внешние компоненты мягких роботов. Исследователи проверили изобретение на мягкой роботизированной руке, которая может оценивать свое положение в пространстве и самостоятельно двигаться в зависимости от информации об окружающей среде, то есть испытывать подобие тактильных ощущений.
 Фото: news.mit.edu
Фото: news.mit.edu
Система мягких датчиков, которые покрывают тело робота, работает по принципу проприоцепции, то есть способности человека понимать положение частей своего тела относительно друг друга и в пространстве, а также амплитуду движений. В качестве аналогов нервных окончаний, которые посылают сигнал в мозг и потом в мышцы, для роботов ученые использовали сенсоры и нейронную сеть. Чтобы научиться восприятию пространства, нейросеть определяла местоположение механической руки с помощью новых сенсоров и сравнивала его с данными от обычных датчиков захвата движения.
Один из ученых, Райан Труби (Ryan Truby), для изготовления датчиков предложил использовать листы проводящего силиконового материала. Такие листы продаются в обычном магазине в рулонах и служат для защиты от электромагнитных помех. Труби вспомнил, что эти материалы обладают пьезорезистивными свойствами, то есть меняют электрическое сопротивление при механическом напряжении. Датчик из такого материала в ответ на растяжение и сжатие меняет свое электрическое сопротивление. Это изменение преобразуется в определенное выходное напряжение, значение которого можно зафиксировать и использовать для обозначения разных движений.
Сами по себе силиконовые листы достаточно твердые, поэтому их изменяли по аналогии с японской техникой изготовления открыток киригами: на листе делали много маленьких разрезов и надрезов так, чтобы они могли сгибаться.
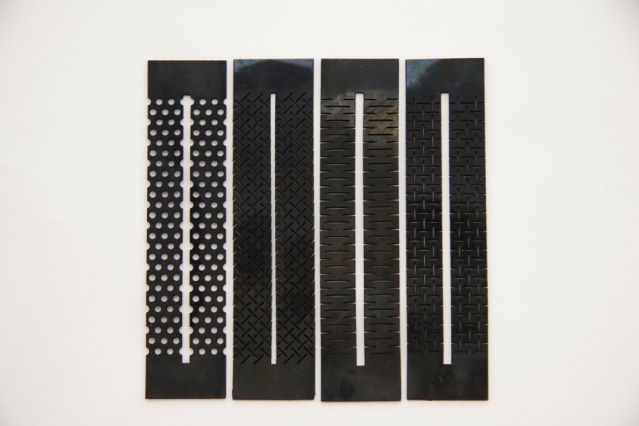 Фото: news.mit.edu
Фото: news.mit.edu
По словам ученых, одна из целей подобной системы — создание искусственных конечностей, которые будут взаимодействовать с окружающей средой лучше, чем современные бионические руки и ноги.
Далее ученые будут исследовать новые конструкции датчиков для повышения чувствительности и разрабатывать новые модели и методы глубокого обучения, чтобы обучение для каждого нового мягкого робота занимало меньше времени. Пока что нейронная сеть и сенсорная кожа не чувствительны к захвату незаметных и динамичных движений.
Источник
Полный текст статьи читайте на Компьютерра
