Удаленное управление роботом Lego Mindstorms по JMX и IP Video
Основной модуль конструктора Lego Mindstorms EV3 может работать с прошивкой leJOS, позволяющей запускать Java-приложения. Специально для этого Oracle выпустил и поддерживает отдельную версию полноценной Java SE.Нормальная JVM позволила мне использовать встроенный в нее протокол Java Management Extensions (JMX), чтобы реализовать удаленное управление роботом-манипулятором. Для объединения управляющих элементов, показаний датчиков и картинок с установленных на роботе IP-камер используется мнемосхема, сделанная на платформе AggreGate.
Сам робот состоит из двух основных частей: шасси и руки-манипулятора. Они управляются двумя полностью независимыми компьютерами EV3, вся их координация осуществляется через управляющий сервер. Прямого соединения между компьютерами нет.
Оба компьютера подключены к IP-сети помещения через Wi-Fi адаптеры NETGEAR WNA1100. Робот управляется восемью двигателями Mindstorms — из них 4 «большие» и 4 «маленькие». Также установлены инфракрасный и ультразвуковой датчики для автоматической остановки у препятствия при движении задним ходом, два датчика прикосновения для остановки поворота манипулятора из-за препятствия, и гироскопический датчик, облегчающий ориентировку оператора при помощи визуализации положения плеча.
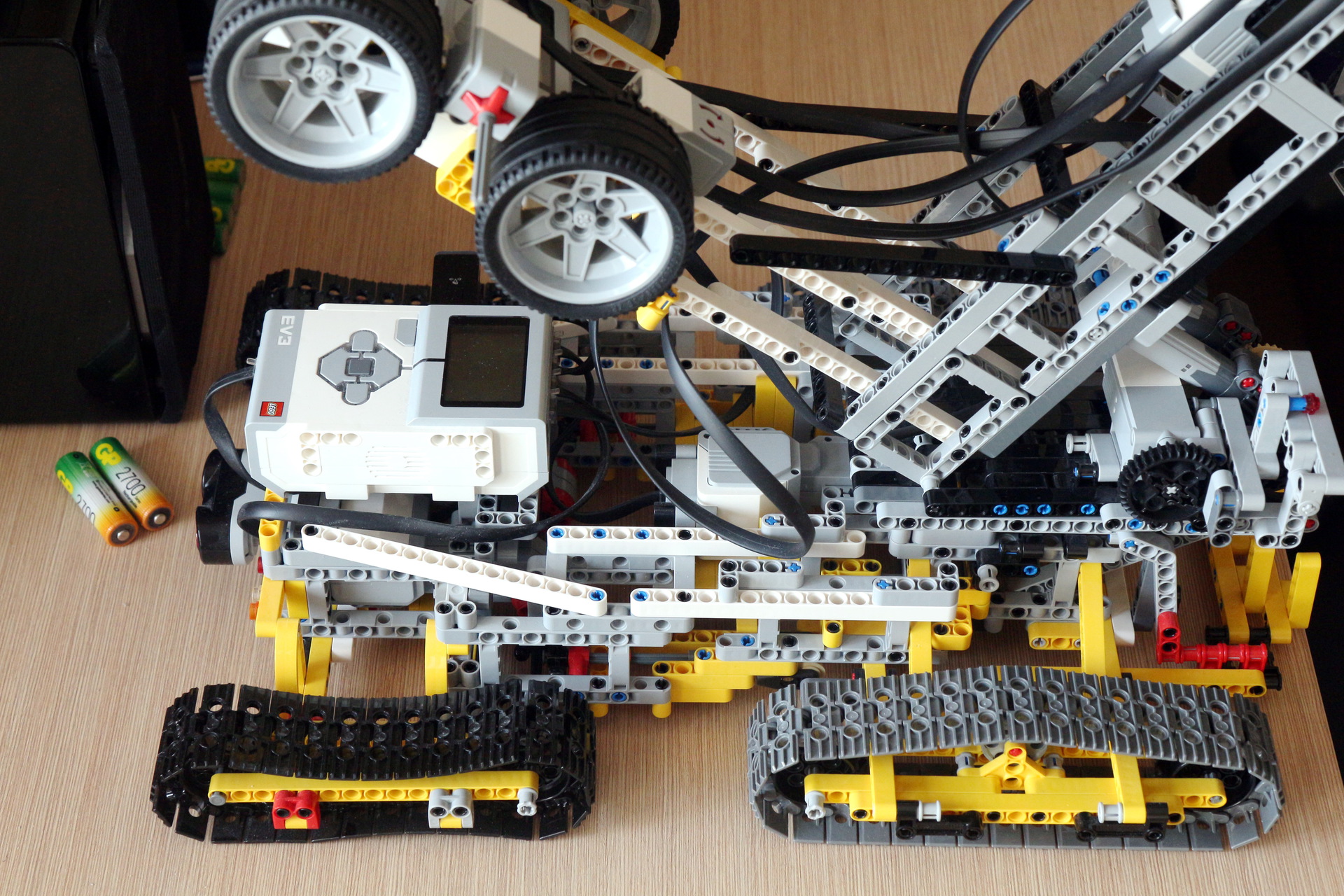
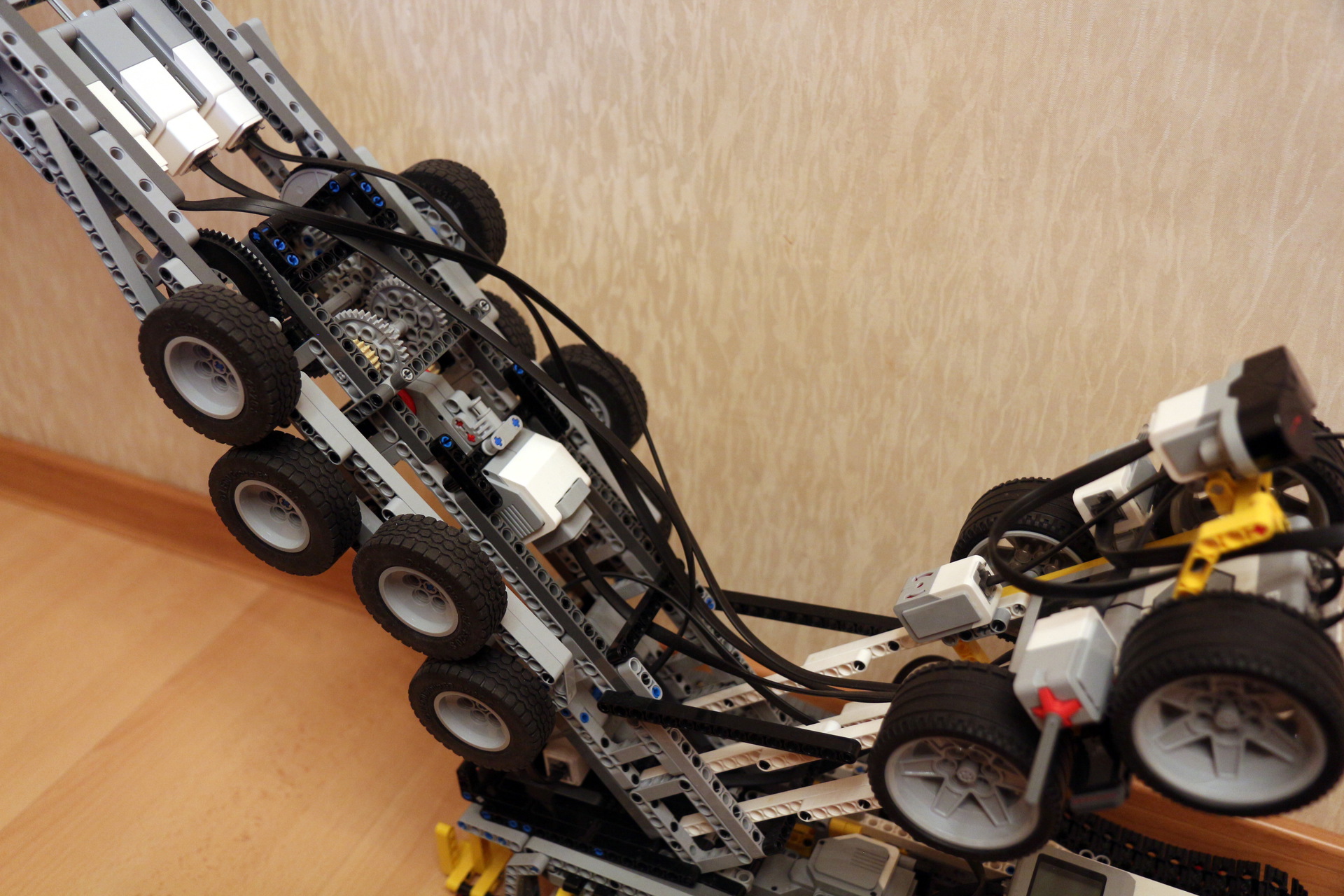
В шасси установлены два двигателя, каждый из которых передает усилие на пару гусеничных приводов. Еще один двигатель поворачивает всю руку-манипулятор целиком на 360 градусов.
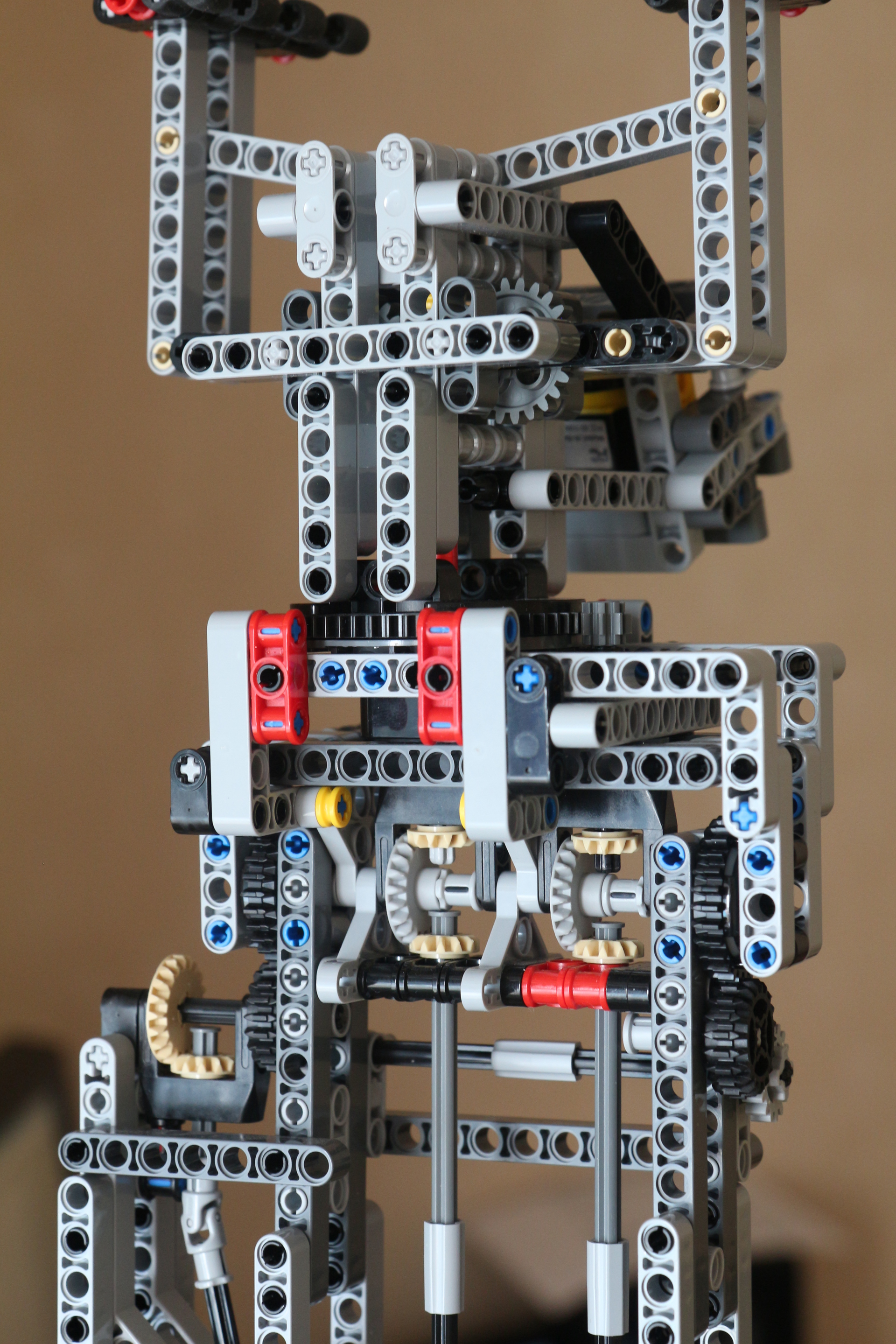
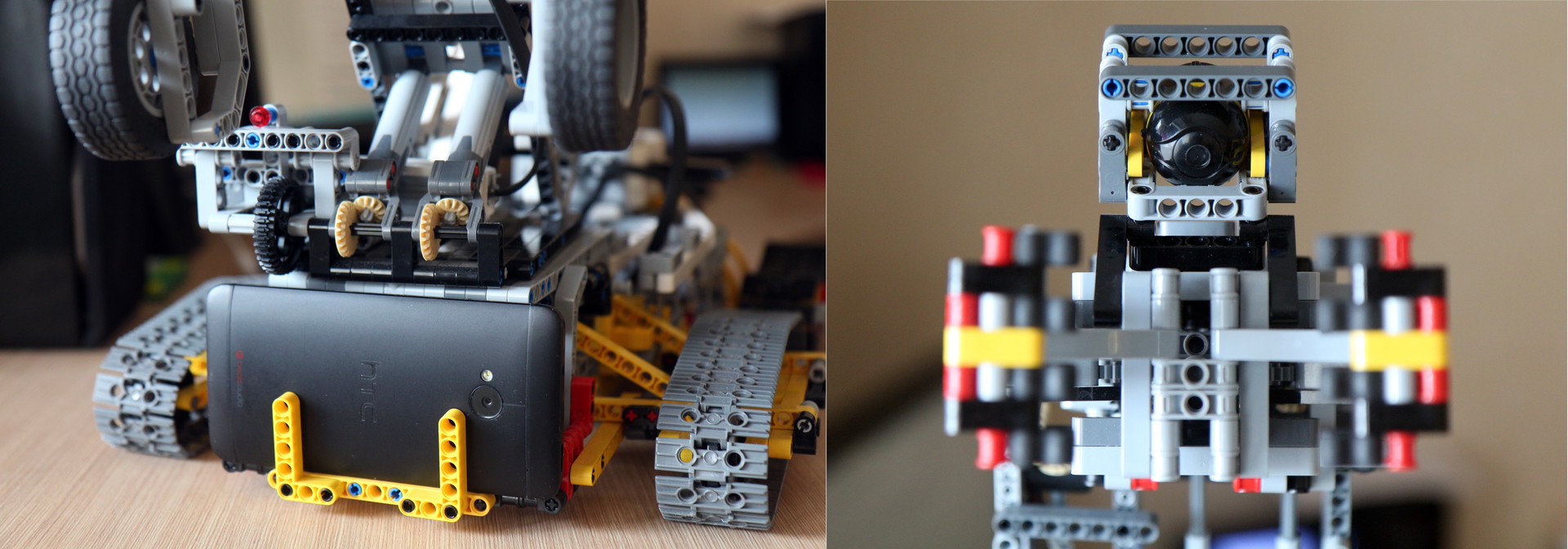
В самом манипуляторе два двигателя отвечают за подъем и опускание «плеча» и «предплечья». Еще три двигателя занимаются подъемом/опусканием кисти, ее поворотом на 360 градусов и сжиманием/разжиманием «пальцев».
Самым сложным механическим узлом является «кисть». Из-за необходимости выноса трех тяжелых двигателей в район «локтя» конструкция получилась достаточно хитрой.
В целом все выглядит так (коробок спичек был с трудом найден для масштаба):

Для передачи картинки установлены две камеры:
Обычный Android-смартфон с установленным приложением IP Webcam для общего обзора (на снимке HTC One)
Автономная Wi-Fi микро-камера AI-Ball, установленная прямо на «кисти» манипулятора и помогающая хватать предметы сложной формы
ПО самого робота получилось максимально простым. Программы двух компьютеров очень похожи, они запускают JMX сервер, регистрируют MBean’ы, соответствующие двигателям и датчикам, и засыпают в ожидании операций по JMX.
Код главных классов ПО руки-манипулятора public class Arm { public static void main (String[] args) { try { EV3Helper.printOnLCD («Starting…»); EV3Helper.startJMXServer (»192.168.1.8», 9000); MBeanServer mbs = ManagementFactory.getPlatformMBeanServer (); EV3LargeRegulatedMotor motor = new EV3LargeRegulatedMotor (BrickFinder.getDefault ().getPort («A»)); LargeMotorMXBean m = new LargeMotorController (motor); ObjectName n = new ObjectName («robot: name=MotorA»); mbs.registerMBean (m, n); // Registering other motors here EV3TouchSensor touchSensor = new EV3TouchSensor (SensorPort.S1); TouchSensorMXBean tos = new TouchSensorController (touchSensor); n = new ObjectName («robot: name=Sensor1»); mbs.registerMBean (tos, n); // Registering other sensors here EV3Helper.printOnLCD («Running»); Sound.beepSequenceUp (); Thread.sleep (Integer.MAX_VALUE); } catch (Throwable e) { e.printStackTrace (); } } }
public class EV3Helper
{
static void startJMXServer (String address, int port)
{
MBeanServer server = ManagementFactory.getPlatformMBeanServer ();
try
{
java.rmi.registry.LocateRegistry.createRegistry (port);
JMXServiceURL url = new JMXServiceURL («service: jmx: rmi:///jndi/rmi://» + address + »:» + String.valueOf (port) + »/server»);
Map
Для каждого типа датчика и мотора создан интерфейс MBean’а и реализующий его класс, которые напрямую делегирует все вызовы классу, входящему в leJOS API.
Пример кода интерфейса public interface LargeMotorMXBean { public abstract void forward (); public abstract boolean suspendRegulation (); public abstract int getTachoCount (); public abstract float getPosition (); public abstract void flt (); public abstract void flt (boolean immediateReturn); public abstract void stop (boolean immediateReturn); public abstract boolean isMoving (); public abstract void waitComplete (); public abstract void rotateTo (int limitAngle, boolean immediateReturn); public abstract void setAcceleration (int acceleration); public abstract int getAcceleration (); public abstract int getLimitAngle (); public abstract void resetTachoCount (); public abstract void rotate (int angle, boolean immediateReturn); public abstract void rotate (int angle); public abstract void rotateTo (int limitAngle); public abstract boolean isStalled (); public abstract void setStallThreshold (int error, int time); public abstract int getRotationSpeed (); public abstract float getMaxSpeed (); public abstract void backward (); public abstract void stop (); public abstract int getSpeed (); public abstract void setSpeed (int speed); } Пример кода реализации MBean’а public class LargeMotorController implements LargeMotorMXBean { final EV3LargeRegulatedMotor motor; public LargeMotorController (EV3LargeRegulatedMotor motor) { this.motor = motor; } @Override public void forward () { motor.forward (); } @Override public boolean suspendRegulation () { return motor.suspendRegulation (); } @Override public int getTachoCount () { return motor.getTachoCount (); } @Override public float getPosition () { return motor.getPosition (); } @Override public void flt () { motor.flt (); } @Override public void flt (boolean immediateReturn) { motor.flt (immediateReturn); }
// Similar delegating methods skipped }
Как ни странно, на этом программирование закончилось. На стороне сервера и операторского рабочего места не было написано ни одной строчки кода.
Непосредственное управление роботом осуществляет сервер IoT-платформы AggreGate. Установленная бесплатная версия продукта AggreGate Network Manager включает драйвер протокола JMX и позволяет подключить до десяти JMX-хостов. Нам понадобится подключить два — по одному на каждый кирпичик EV3.
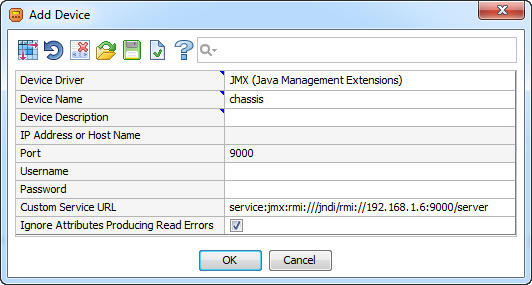
Прежде всего, нужно создать аккаунт JMX устройства, указав в настройках URL, заданный при запуске JMX сервера:
Свойства соединения с JMX-устройством
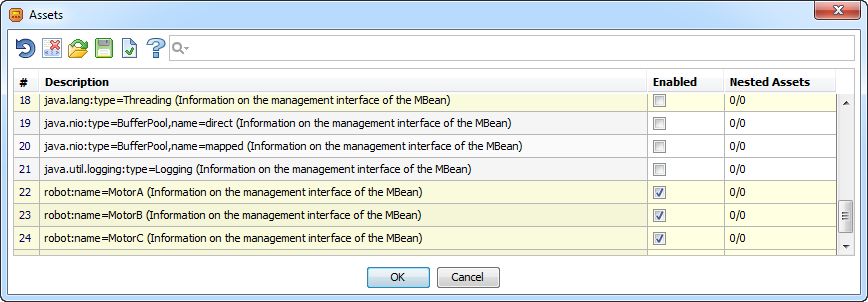
 После этого выбираем активы (т.е. MBean’ы в данном случае), которые будут добавлены в профиль устройства:
После этого выбираем активы (т.е. MBean’ы в данном случае), которые будут добавлены в профиль устройства:
Выбор MBean’ов
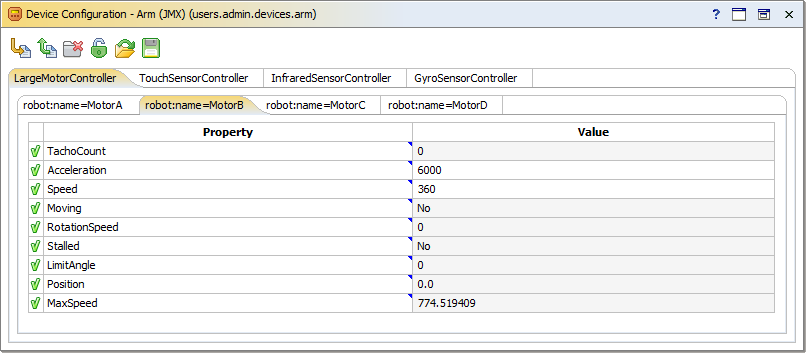
 И через несколько секунд смотрим и меняем текущие значения всех опрошенных свойств MBean’ов:
И через несколько секунд смотрим и меняем текущие значения всех опрошенных свойств MBean’ов:
Снимок устройства
 Можно также потестировать различные операции вызывая вручную методы MBean’ов, например forward () и stop ().
Можно также потестировать различные операции вызывая вручную методы MBean’ов, например forward () и stop ().
Список операций
 Далее настраиваем периоды опроса для датчиков. Высокая частота опроса (100 раз в секунду) используется, так как управляющий сервер находится в локальной сети вместе с роботом и именно сервер принимает решения об остановке вращения при упоре в препятствие и т.п. Решение, безусловно, не промышленное, но в хорошо работающей Wi-Fi сети в рамках одной квартиры показало себя вполне адекватным.
Далее настраиваем периоды опроса для датчиков. Высокая частота опроса (100 раз в секунду) используется, так как управляющий сервер находится в локальной сети вместе с роботом и именно сервер принимает решения об остановке вращения при упоре в препятствие и т.п. Решение, безусловно, не промышленное, но в хорошо работающей Wi-Fi сети в рамках одной квартиры показало себя вполне адекватным.
Периоды опроса

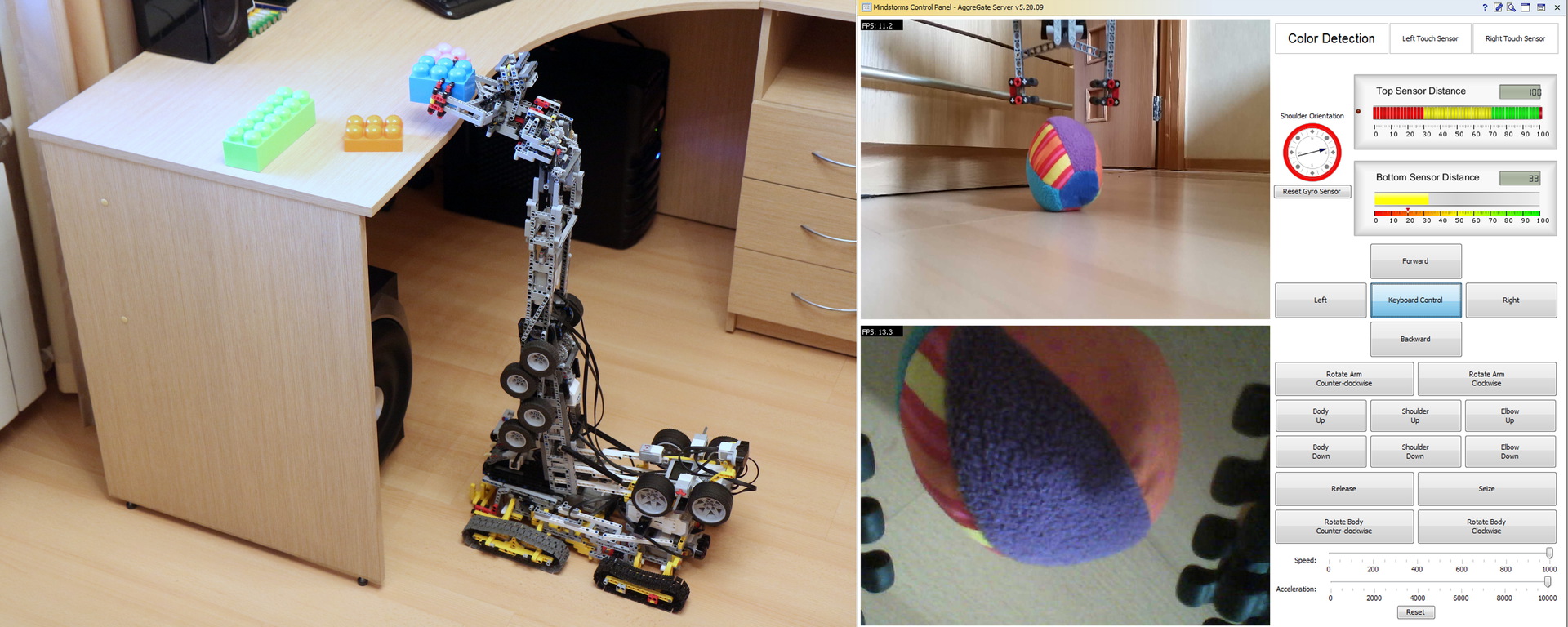
Теперь переходим к созданию интерфейса оператора. Для этого сначала создаем новый виджет и накидываем в него нужные компоненты. В конечном работающем варианте выглядит он так:

По сути, весь интерфейс состоит из нескольких панелей с кнопками, слайдерами и индикаторами, сгруппированными в различные сеточные раскладки, и двух больших видео-плееров, транслирующих картинки с камер.
Вид изнутри редактора интерфейсов
Вся форма:  Вид с показанными панелями-контейнерами:
Вид с показанными панелями-контейнерами: 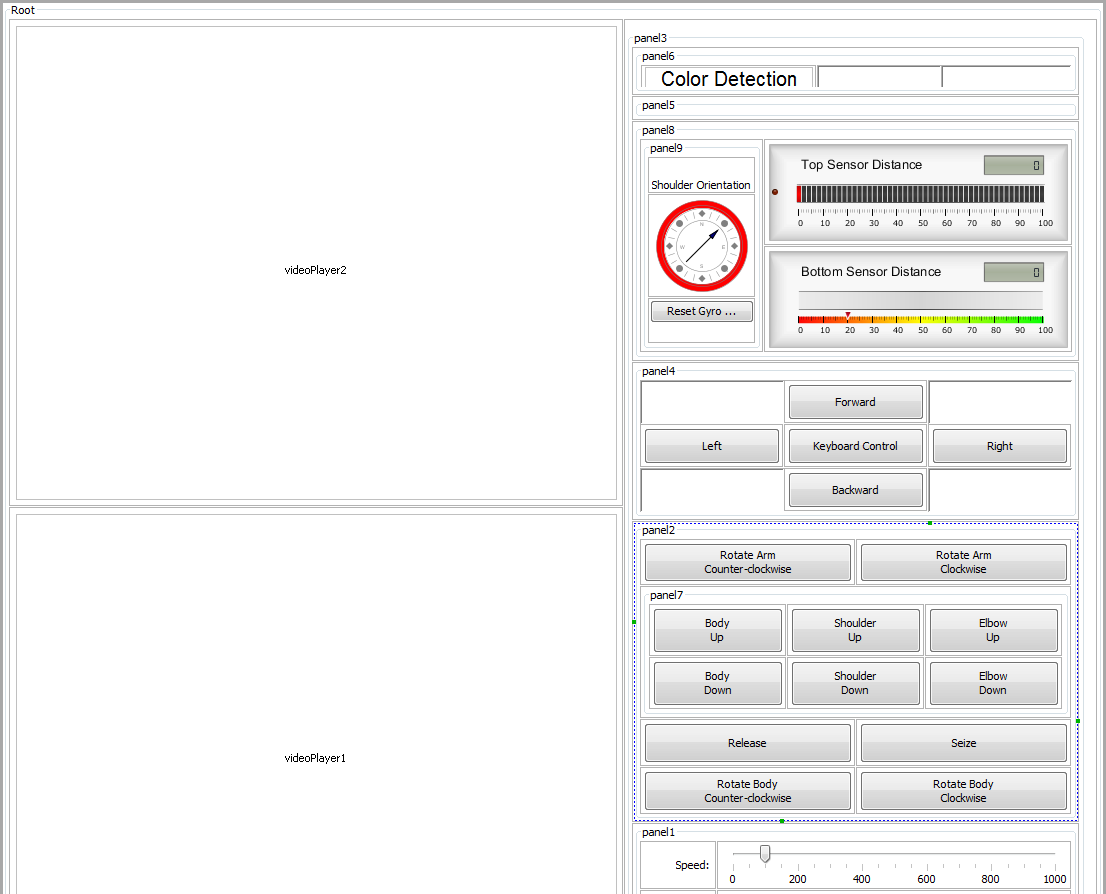
Теперь, как говорят АСУТПшники, осталось «оживить мнемосхему». Для этого применяются так называемые привязки связывающие свойства и методы графических компонентов интерфейса со свойствами и методами серверных объектов. Так как компьютеры EV3 уже подключены к серверу, серверными объектами могут быть и MBean’ы нашего робота.
Весь интерфейс оператора содержит около 120 привязок, большая часть из которых однотипна:
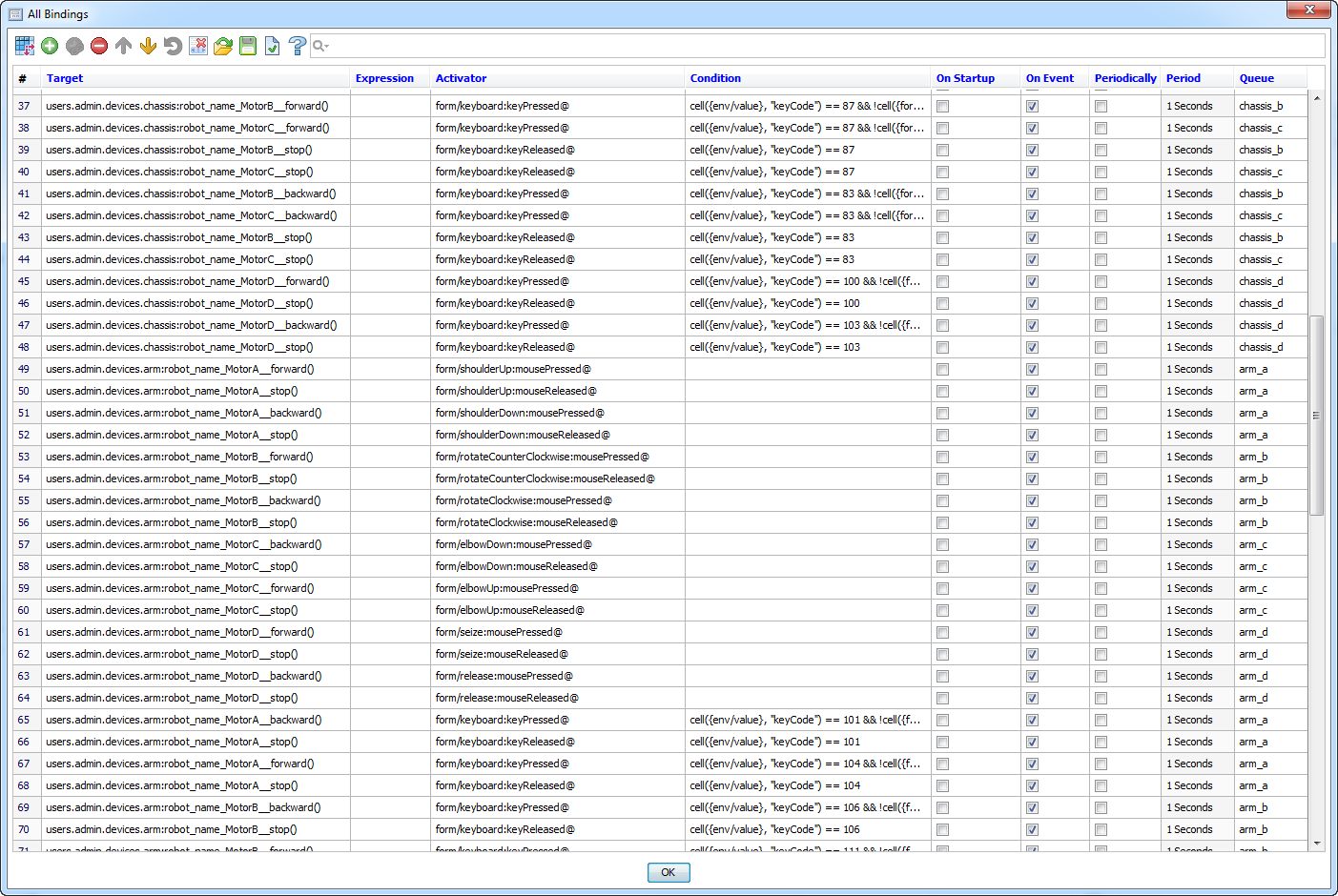
Половина однотипных привязок реализует управление при помощи кликов на кнопки, расположенные на мнемосхеме. Это красиво, удобно для тестирования, но совершенно непригодно для реального передвижения робота и перемещения грузов. Активаторами привязок из этой группы являются события mousePressed и mouseReleased различных кнопок.
Вторая половина привязок позволяет управлять роботом с клавиатуры, предварительно нажав на кнопку Keyboard Control. Эти привязки реагируют на события keyPressed и keyReleased, а в условии каждой привязки прописано, на какой именно код кнопки нужно реагировать.
Все управляющие привязки вызывают методы forward (), backward () и stop () различных MBean’ов. Поскольку доставка событий происходит асинхронно, важно, чтобы вызовы функций forward ()/backward () и последующие вызовы stop () не перепутались. Для этого привязки, вызывающие методы одного MBean’а, добавлены в одну очередь (Queue).
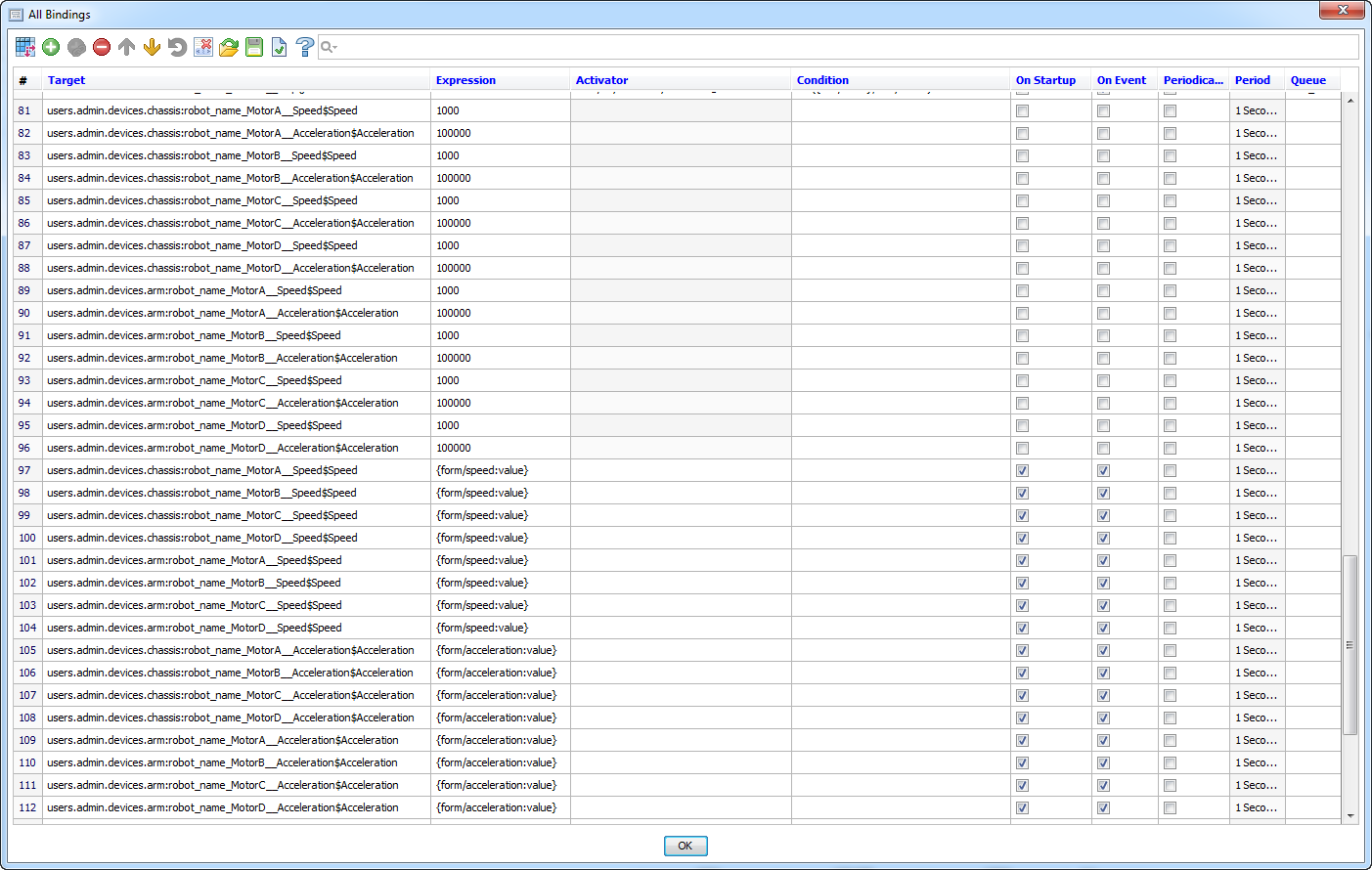
Две отдельные группы привязок выставляют начальные скорости и ускорения двигателей (сейчас это реализовано на стороне сервера при помощи модели, поэтому эти привязки отключены) и меняют скорости/ускорения при перемещении ползунков Speed и Acceleration.
Привязки скорости и ускорения двигателей
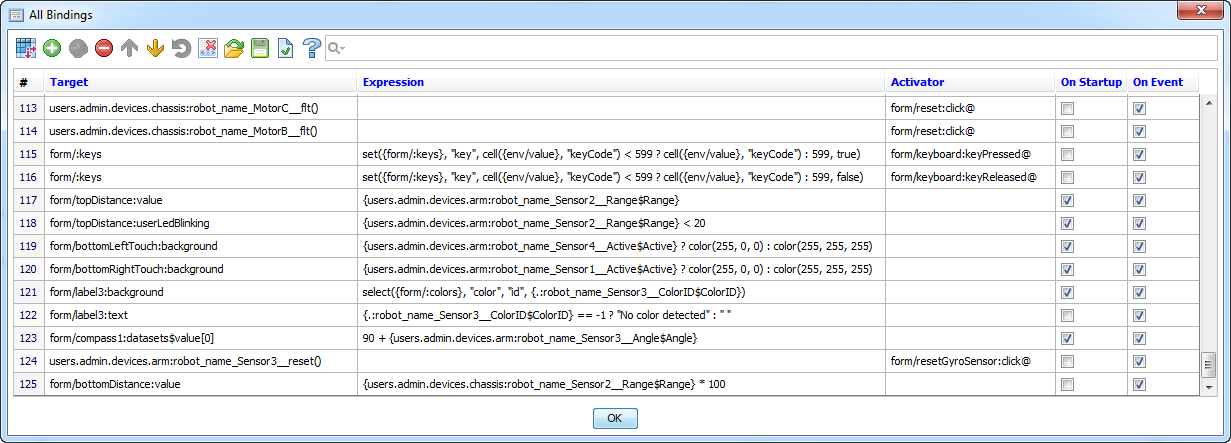
 Все остальные привязки подсвечивают части мнемосхемы при активации сенсоров касания, показывают измеренные сенсорами расстояния до объектов на шкалах и выполняют различные служебные функции.
Все остальные привязки подсвечивают части мнемосхемы при активации сенсоров касания, показывают измеренные сенсорами расстояния до объектов на шкалах и выполняют различные служебные функции.
Остальные привязки
 Помимо аккаунтов JMX-устройств и вышеописанного виджета на сервере есть еще один объект, участвующий в управлении роботом. Это модель, которая останавливает двигатели при срабатывании одного из датчиков прикосновения. Осуществляется это также при помощи привязок, различие их с привязками виджета лишь в том, что привязки модели обрабатываются на сервере и связывают одни свойства серверных объектов с другими.
Помимо аккаунтов JMX-устройств и вышеописанного виджета на сервере есть еще один объект, участвующий в управлении роботом. Это модель, которая останавливает двигатели при срабатывании одного из датчиков прикосновения. Осуществляется это также при помощи привязок, различие их с привязками виджета лишь в том, что привязки модели обрабатываются на сервере и связывают одни свойства серверных объектов с другими.
Привязки модели управления
 Закончив настройку виджета и модели можно запускать виджет, активировать клавиатурное управление и развлекаться:
Закончив настройку виджета и модели можно запускать виджет, активировать клавиатурное управление и развлекаться:
[embedded content]
