Самоходная платформа на МК esp8266 с micropython
Привет, Хабр!
Эта статья описывает страдания начинающего процесс изготовления самоходной платформы на базе МК esp8266 с micropython, управляемой через встроенный веб-сервер.
КДПВ:
Как я уже упоминал в первой статье, проект учебный, так что прошу не судить строго.
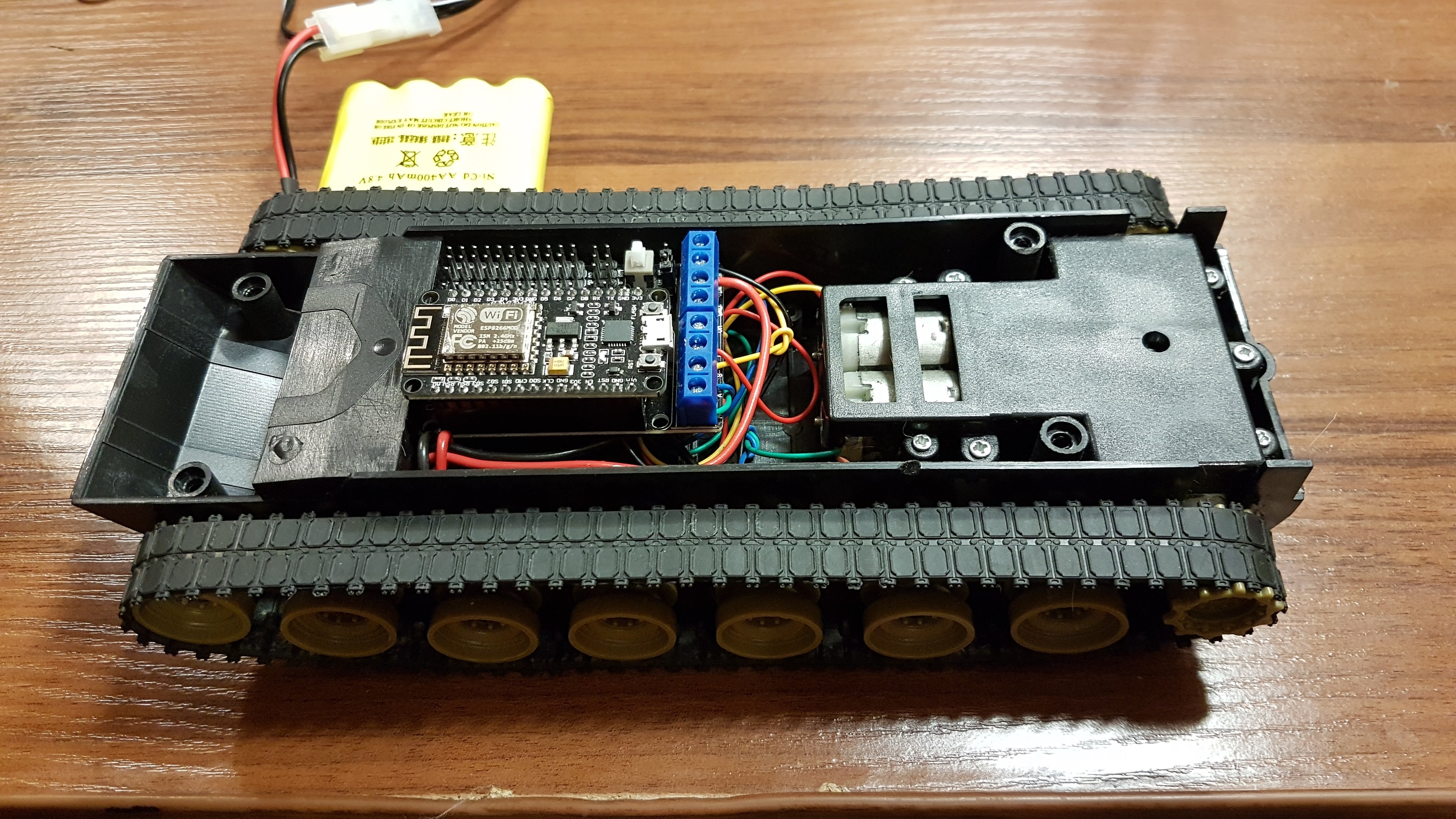
Итак, задача первого этапа — сделать гусеничную платформу, которой можно управлять через wi-fi.
Для чего в закромах был найден старый игрушечный танк, а также закуплен МК esp8266 (ESP-12E) и драйвер моторов к нему.
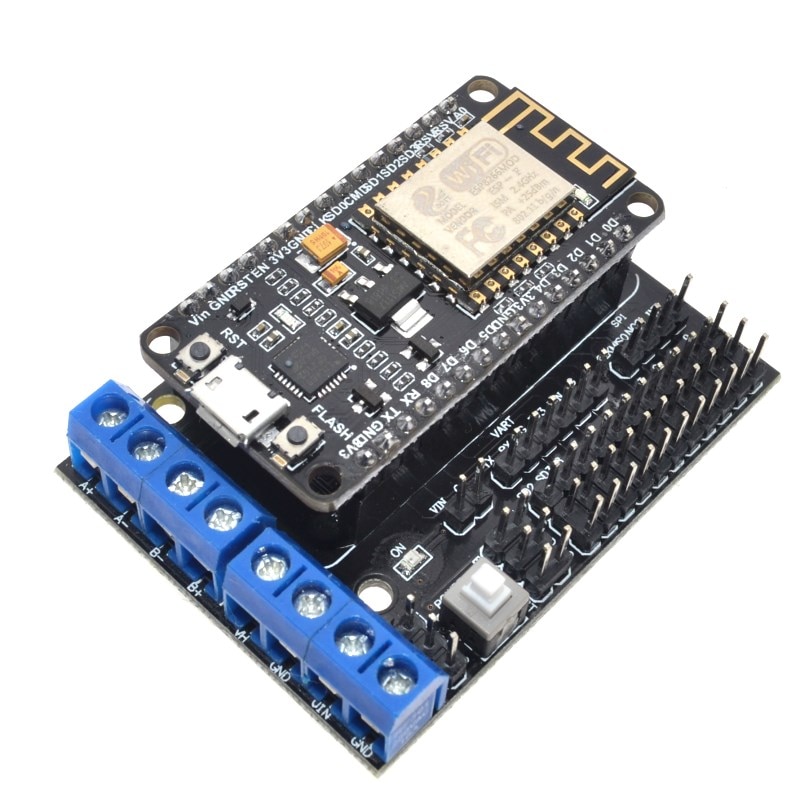
Далее, всё вышеперечисленное было собрано в соответствии со схемой:
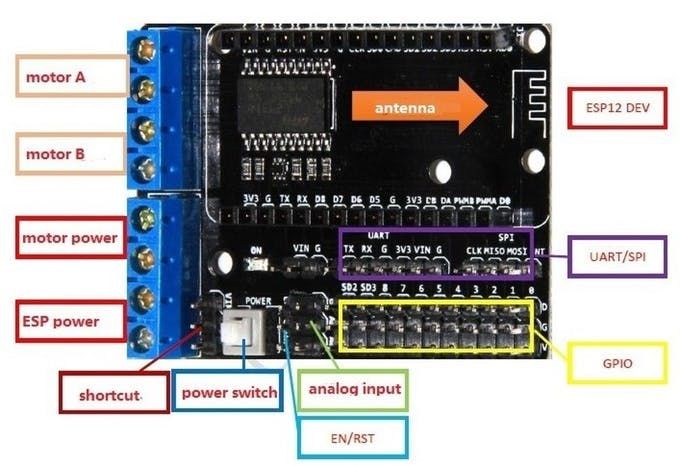
И после пары дней непродолжительного изучения документации, стало понятно, как же управлять моторами:
from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT) # PWMA-GPIO5
servo_2 = Pin(4, Pin.OUT) # PWMB-GPIO4
revrs_L = Pin(0, Pin.OUT, value=0) # DA-GPIO0
revrs_R = Pin(2, Pin.OUT, value=0) # DB-GPIO2
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
Таким образом, pin5 и pin4 — позволяют задать скорость вращения моторов через ШИМ, а pin0 и pin2 — управляют реверсом для выходов «А» и «В» соответственно. Кроме того, так как на моей плате к pin2 ещё подключен и светодиод — то параллельно с движением наблюдаем и световые эффекты :)
Однако, сразу не взлетело…
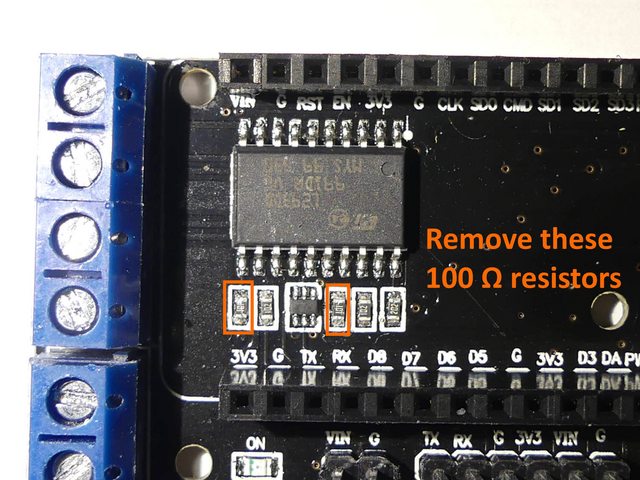
Гугление на заданную тему, привело на форум, где была рекомендация удалить два «лишних» резистора, что и было проделано. Цитата оттуда:
Я измерил эти резисторы, на входе в L293DD сопротивление 1КОм, но они имеют сопротивление только 100 Ом к земле. Это означает, что входной сигнал от контроллера NodeMCU не может достичь L293DD. Я действительно не знаю, почему они там — L293DD может обрабатывать до 7 В на своем входе, а NodeMCU выдает выход 3,3 В.
Я удалил эти два резистора по 100 Ом (первый и третий слева, когда антенна находится справа), и теперь шилд работает.
После этого, дело пошло на лад, и
# RoboTank based on ESP8266 with motor shield
import network
import socket
from machine import Pin, PWM
""" nodemcu pins from the motor shield """
servo_1 = Pin(5, Pin.OUT) # PWMA-GPIO5
servo_2 = Pin(4, Pin.OUT) # PWMB-GPIO4
revrs_L = Pin(0, Pin.OUT, value=0) # DA-GPIO0
revrs_R = Pin(2, Pin.OUT, value=0) # DB-GPIO2
""" named after the L9110 h-bridge pins """
motor_L = PWM(servo_1, freq=1000, duty=0)
motor_R = PWM(servo_2, freq=1000, duty=0)
""" TODO: variable speed """
speed = 1023
""" function for connecting to your local WiFi network """
def do_connect():
essid = 'home_wifi'
password = '12345678'
sta_if = network.WLAN(network.STA_IF)
if not sta_if.isconnected():
print('connecting to network...')
sta_if.active(True)
sta_if.connect(essid, password)
while not sta_if.isconnected():
pass
print('network config:', sta_if.ifconfig())
def stop_all():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(0)
def backward():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def forward():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(1)
motor_R.duty(speed)
def left():
revrs_L.value(1)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(speed)
def right_turn():
revrs_L.value(0)
motor_L.duty(speed)
revrs_R.value(0)
motor_R.duty(0)
def left_turn():
revrs_L.value(0)
motor_L.duty(0)
revrs_R.value(0)
motor_R.duty(speed)
def web_page(request):
motor_state="Stopped"
if request.find('GET /?forward') > 0:
motor_state="Going Forward"
forward()
if request.find('GET /?left') > 0:
motor_state="Rotate Left"
left()
if request.find('GET /?right') > 0:
motor_state="Rotate Right"
right()
if request.find('GET /?left_turn') > 0:
motor_state="Turn Left"
left_turn()
if request.find('GET /?right_turn') > 0:
motor_state="Turn Right"
right_turn()
if request.find('GET /?backward') > 0:
motor_state="Going Backward"
backward()
if request.find('GET /?stop') > 0:
motor_state="Stopped"
stop_all()
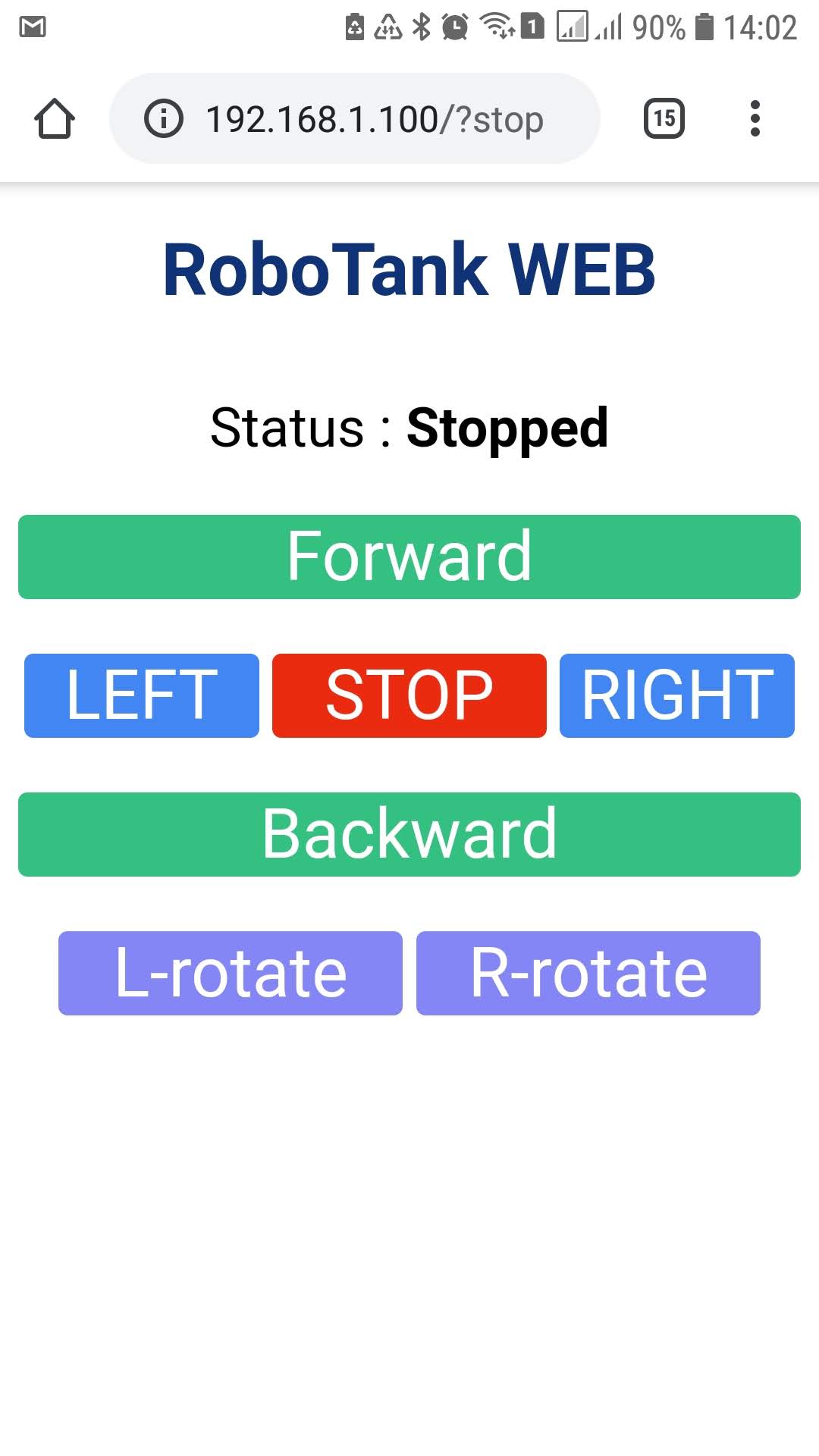
html = """RoboTank WEB
RoboTank WEB
Status : """ + motor_state + """
"""
return html
#Stop all motors first
stop_all()
# connect to wi-fi network
do_connect()
# create socket for web srvr
addr = socket.getaddrinfo('0.0.0.0', 80)[0][-1]
s = socket.socket()
try:
s.bind(addr)
s.listen(1)
except:
s.close()
s.bind(addr)
s.listen(1)
# main loop
while True:
conn, addr = s.accept()
print('Got a connection from %s' % str(addr))
request = conn.recv(1024)
request = str(request)
print('The Content = %s' % request)
response = web_page(request)
conn.send('HTTP/1.1 200 OK\n')
conn.send('Content-Type: text/html\n')
conn.send('Connection: close\n\n')
conn.sendall(response)
conn.close()
оказался вполне работоспособным, и успешно решающим поставленную на первый этап задачу.
Первые покатушки:
Первая часть (Установка micropython на ESP8266 и работа с ним под Linux)
Источники вдохновения:
funprojects.blog/2019/02/12/micropython-air-boat
www.instructables.com/id/Simplest-Wifi-Car-Using-ESP8266-Motorshield
forum.micropython.org/viewtopic.php? t=3977
randomnerdtutorials.com/esp32-esp8266-micropython-web-server
docs.micropython.org/en/latest/esp8266/tutorial/index.html
