Роботы смогут аккуратно пощупать нежные объекты

Манипулятор схватил муравья
Инженеры из университета науки и техники штата Айова создали новый тип манипуляторов для роботов, которые позволят им аккуратно обращаться с хрупкими и мелкими объектами. Маленькие трубочки, напоминающие щупальца, обвиваются вокруг нужного объекта и держат его, не сдавливая.
Классический манипулятор напоминает клещи, или два пальца, которыми человек берёт предметы. Чтобы удержать предмет в пальцах, его необходимо сдавить. Чтобы избежать сдавливания хрупких и дел, инженеры изобретают различные присоски, эмулируют лапы геккона и применяют другие инновации. Но американские инженеры решили перенять захваты у осьминогов и им подобных.
Микротрубочки имеют всего 8 миллиметров в длину и около 0,2 миллиметров в диаметре. Материал трубочек — полидиметилсилоксан, прозрачный полимер.
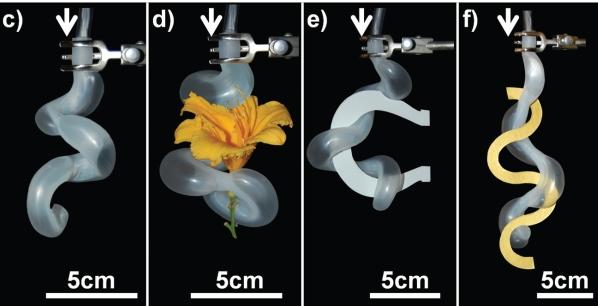
Принцип действия трубок прост. Они герметично закрыты с одной стороны, и когда аппарат накачивает в них воздух, они распрямляются, а когда откачивает — сворачиваются в несколько колец.
Определённая форма окончания трубочки и изменяющаяся толщина стенок позволяет ей сворачиваться в спираль контролируемым образом. Сложную форму трубочки удалось создать благодаря предварительному компьютерному моделированию. Это первые щупальцевидные манипуляторы, способные сворачиваться таким образом, которые удалось сделать такими маленькими. Подробности можно прочесть в научном журнале Nature.
Такие манипуляторы найдут себе применение и в области медицинских роботов. Нежные захваты можно будет использовать во время операций для фиксации и перемещения таких структур, как сосуды или мягкие ткани.
На похожем принципе работают лапки обычных пауков. Сгибаются ноги паука, как обычно, мышцами, а разгибаются гидростатическим давлением гемолимфы — особой жидкости, которая циркулирует по всей полости у тела членистоногого.
Щупальца давно привлекали инженеров. Похожее решение с гибкими пневматическими трубками уже демонстрировали ученые из Гарвардской школы инжиниринга и прикладных наук (США).
Творение инженеров из Гарварда
Из необычных решений можно вспомнить коцепт протеза, в котором мотор натягивает и ослабляет пропущенные через щупальце кабели. Они позволяют протезу постепенно скручиваться, захватывая предметы от маленьких до довольно крупных. Распрямляется протез за счёт внутренней упругости.

Протез-щупальце
