Распознавание цифр на микроконтроллере
Привет, Гиктаймс!
Как видно из названия речь в этой статье пойдет о распознавании цифр на микроконтроллере. Сразу хочу оговориться, что в данной статье не будет приведен исходный код, рассматриваться технология или алгоритм распознавания, скажу лишь, что используются идеи системного подхода. Некоторые из них изложены в наших статьях (здесь, здесь и вот здесь). Это связано с тем, что наш подход тянет на оригинальность, но требует уточнения некоторых вопросов. Кто-то может сказать: «очередная статья про программирование микроконтроллеров». Отнюдь нет, поиск подобных проектов не дал каких-то внятных результатов, за исключением этого видео. Из обсуждений на форумах понятно одно: идея получения подобного устройства (камера + микроконтроллер = результат распознавания на выходе, а не просто снятая картинка) приходила многим, но оставалась без реализации. Да и распознавание, по общему мнению, требует много вычислительных ресурсов и микроконтроллеры для этого не подходят, в частности про Arduino были высказывания, что это вообще невозможно. Если стало интересно прошу под кат.
Что бы не возникало очевидных вопросов, ответим на них:
- Нет, это не сервис по распознаванию изображений
- Нет, это не OpenCV
- Нет, это не нейронные сети
- Да, распознавание производится именно микроконтроллером!
Идея
Если кратко, то все началось с того, что было желание попробовать свои силы и проверить свои идеи в распознавании изображений. В процессе обсуждения пришли к выводу, что можем обойтись небольшими вычислительными мощностями для решения данной задачи. По понятным причинам подробности этих обсуждений описывать не будем.
Установка
Итак, задача поставлена, нужна реализация. Не отступая от уже устоявшихся принципов
берем то, что есть под рукой. А было под рукой парочка Arduino Uno, старая оптическая мышь и CD привод. Кстати, на то что бы использовать сенсор оптической мыши в качестве камеры для получения изображения нас натолкнула статья прочитанная когда то давно, ну и собственно весь остальной около «мышиный» материал. Единственное нам пришлось выпаять сенсор и всю его обвязку для удобства использования, а также приклеить к нему линзу, которую мы бережно «выдрали» из CD привода. Это было нужно для того, что бы увеличить расстояние от объекта съемки до камеры иначе цифры нашего размера не помещались и была видна лишь небольшая часть. Кстати говоря перед линзой из CD привода, мы пробовали прикрепить оптику от веб камеры, но как-то не срослось.
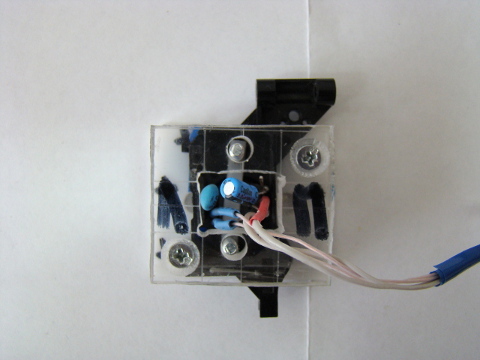
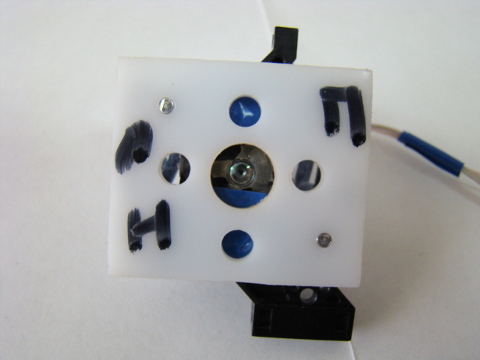
Затем встал вопрос как эту камеру позиционировать над объектом съемки. Тут нам очень помог старый сломанный микроскоп, который лежал без дела. С уважением сняли с него механизм управления предметным столиком. Этот механизм нам позволил перемещать камеру лишь по двум осям, тут же пришла мысль использовать направляющую лазерной головки от CD привода. Все это закрепили на корпусе от многострадального CD привода. В итоге мы получили классный механизм позиционирования камеры.

Итого: так называемая камера у нас есть, механизм позиционирования есть, осталось положить бумажечку с циферкой и получить изображение с камеры. Тут то и начались «проблемы». Так как характеристики «мышинного» оптического сенсора весьма скудны для использования его в качестве камеры, стали импровизировать с подсветкой.
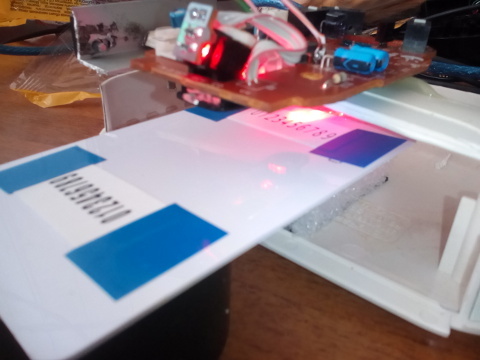
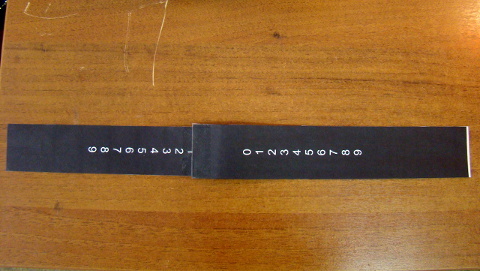
Стало понятно, что просто подсветить не получиться важна интенсивность, направление внешний свет тоже вносит коррективы. Пришлось включать в работу еще одну «ардуинку», что бы управлять интенсивностью подсветки (естественно можно было и по другому управлять, но в последствии и не только подсветкой, а еще переключением цифр на индикаторе). В итоге оказалось, что съемка на просвет гораздо лучше. А если например использовать в качестве цели светящийся семи сегментный индикатор то сенсор его видит вообще отлично. Так, что теперь у нас в качестве объектов съемки индикатор и полоса с белыми цифрами залитая черным фоном.
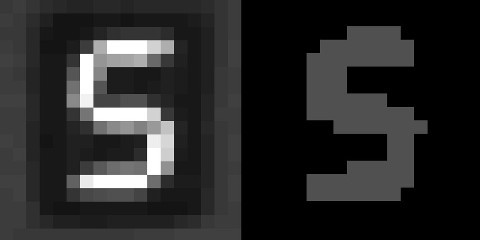
слева изображение в градациях серого полученное с индикатора (такое изображение мы получаем с сенсора), справа бинаризованное.
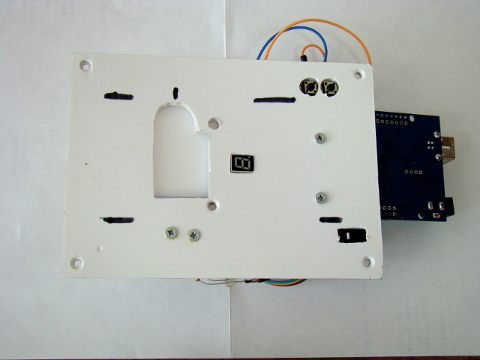
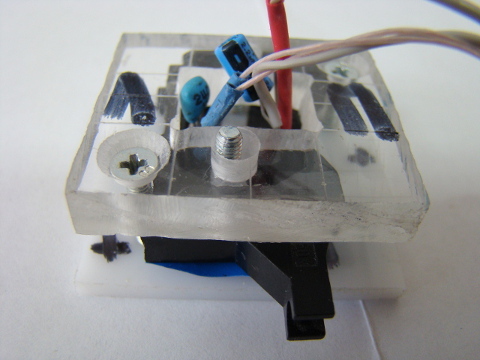
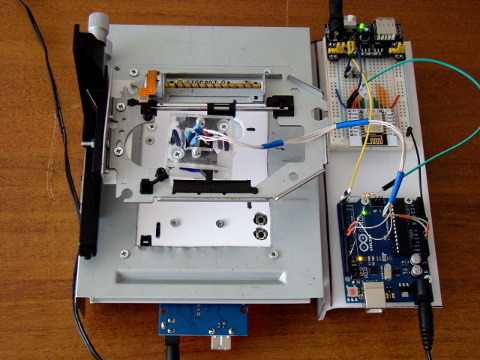
Общий вид установки в сборе
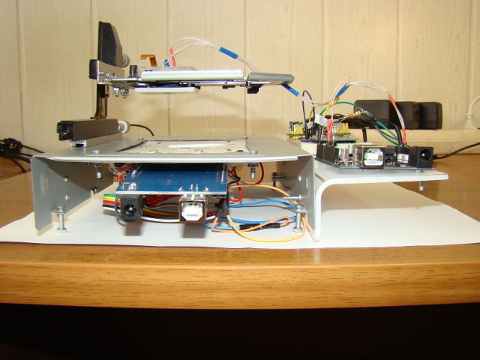
ранний вариант установки
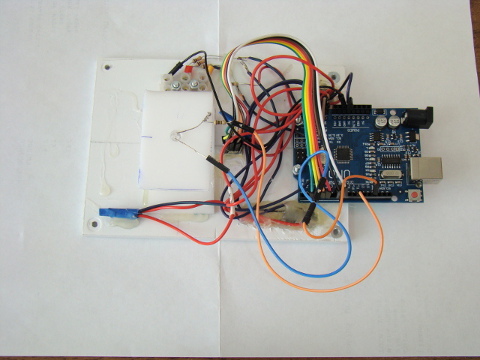
Блок распознавания
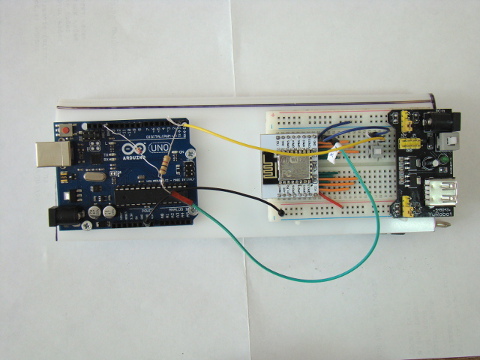
Немаловажную роль в нашей установке играет, так называемый блок распознавания (на картинке выше). Как видно, он состоит из Arduino Uno и всем известного wifi передатчика ESP8266. Поясняю, wifi передатчик нам нужен для того, что бы результат распознавания увидеть на планшете. Приложение на планшете отправляет запрос, «ардуинка», получая запрос, «снимает» изображение с сенсора мыши, затем бинаризует его. После бинаризации происходит распознавание, а после его завершения формируется ответ. В ответе мы посылаем результат распознавания и 41 байт для построения бинаризованного изображения на экране планшета, так сказать, для наглядности.
Если оглянуться, то на «на ардуинку» возложен неплохой функционал: и работа с камерой, и распознавание, и работа с esp8266. Что не могло не отразится на работе — пришлось бороться с нехваткой памяти. Вот уж не думал, что когда либо придется отвоевывать каждый байт памяти.
Демонстрация процесса распознавания
Вместо заключения
На этом собственно и все. Впереди еще очень много работы. И первая задача: распознавание чисел (строки цифр) снимаемых «человеческой» камерой (а не «мышиным сенсором») и переносом разработанной технологии на ESP8266 и снижением накала борьбы за каждый байт памяти.
С радостью ответим на вопросы.
