Проекты Arduino DIY: роботизированный тир «Демоническая карусель»
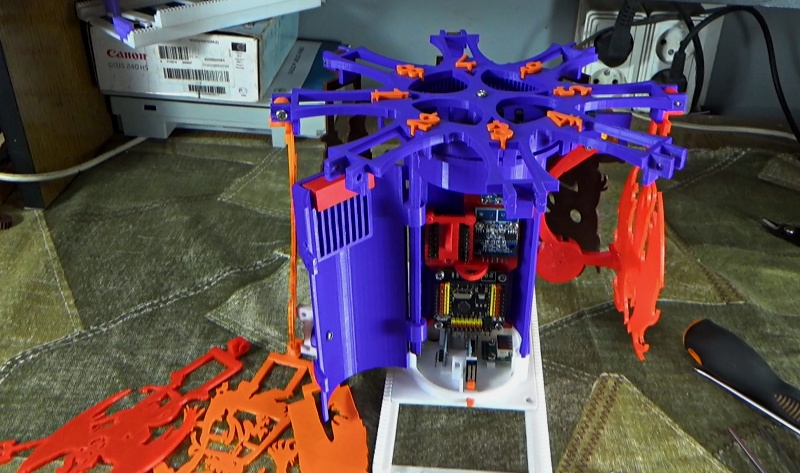
В предыдущей статье я рассказал о своей новой разработке — роботизированной игрушке «Демоническая карусель». Я существенно доработал эту модель, и хотя устройство находится пока в нерабочем состоянии (предстоит еще писать программу), мне всё же есть что показать и рассказать вам. Серьезно изменился дизайн мишени, а принцип работы тира остался прежним.
Все части тира печатались на 3D принтере, в течение почти 50 часов, на скорости 50 и слоем 0,1 миллиметра. Печатать можно было и быстрее, но тогда пострадало бы качество устройства.
На новый вариант игрушки я израсходовал около 350 граммов филамента. Но, конечно, на разработку модели филамента ушло намного больше, с учетом всех проб и ошибок.
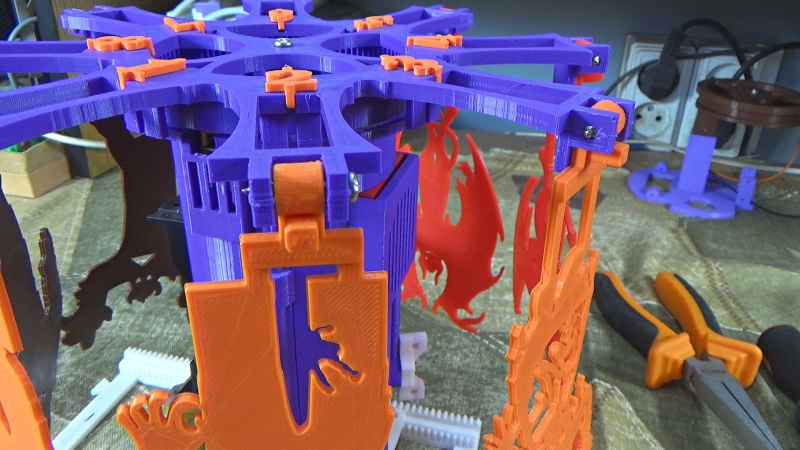
Новая версия держателя мишеней теперь выглядит более изящно, к тому же на нее потребовалось меньше филамента, чем на предыдущий вариант этого устройства. Также благодаря этому я смог уменьшить количество винтов с двух до одного для крепления каждой из восьми мишеней.

Для точного позиционирования мишени реализована цилиндрическая передача с внутренним зацеп¬лением шестерни. Тем самым я ушел от недостатков первого варианта, где держатель мишеней крепился непосредственно на вал двигателя.

Две оптопары устанавливают мишень в нужном положении под подъемное устройство. Использование оптопар — вариант дешевый, поэтому я не стал применять в этой модели магнитный датчик положения, который стоит порядка семи долларов. Я делал и пробный вариант, с магнитным датчиком положения, но оказалось, что это лишь увеличивает стоимость конструкции, а особых улучшений в работу устройства не вносит.
Чтобы оптопары срабатывали в нужных местах, на обратной стороне держателя мишени находятся два сектора. Один сектор, с одним положением, позволяет определить начальное положение мишени. На втором секторе находятся восемь положений, определяющих, есть ли мишень под подъемным устройством.
Механизм подъемного устройства с местоположением датчика удара остался практически прежним, здесь конструкция особым изменениям не подверглась.

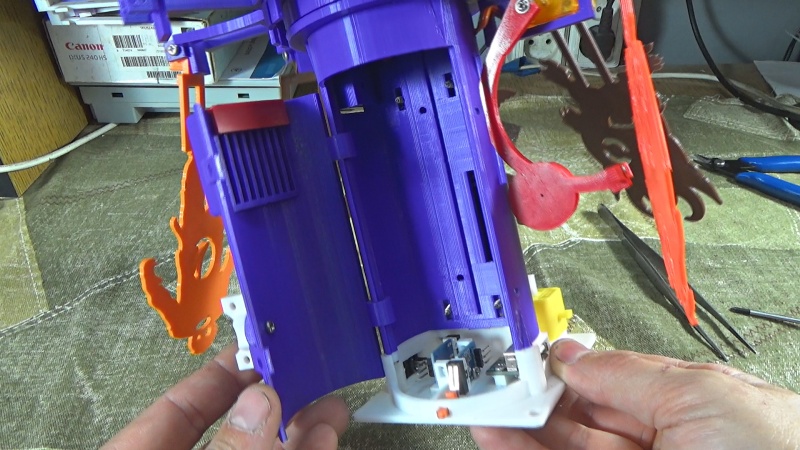
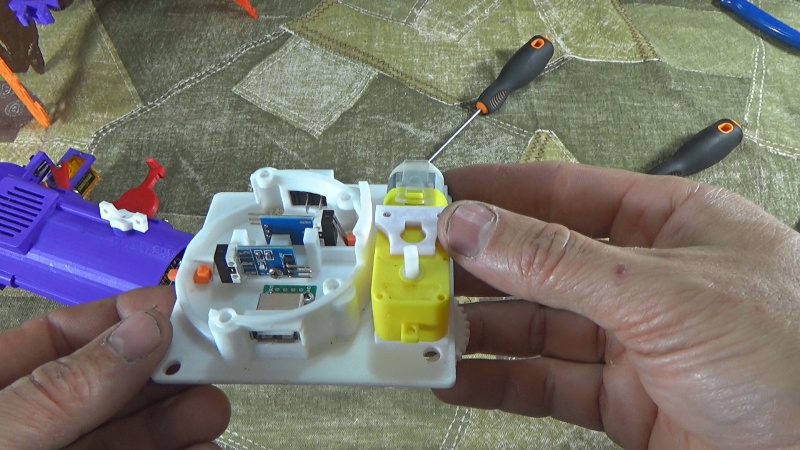
Так как корпус на повербанке отсутствует, то плата повербанка размещена в торце цилиндрической подставки, которая выполняет роль держателя всей конструкции мишени. Минусом конструкции является то, что нужно выпаять USB разъем и выключатель, которые находятся на плате повербанка, иначе повербанк не войдет на свое место.


Доступ к литиевой батарее я не стал ограничивать и закрывать корпусом, хотя это можно всё доработать: для этого предусмотрены специальные квадратные отверстия в корпусе. Через данные отверстия закручиваются винты для крепления повербанка к корпусу. Эти отверстия могут являться элементом крепления для кожуха, скрывающую литиевую батарею.
В корпусе есть еще два отверстия. Одно из них позволяет подключать USB зарядку к повербанку, а второе служит для визуального контроля состояния светодиодов.
Цилиндрическая подставка — пустотелая, поэтому внутри нее можно разместить всю применяемую электронику. Для доступа туда предусмотрена специальная дверца.
Платы применяемых модулей, включая микроконтроллер, при помощи коротких винтов M3 закреплены на фальш-панели. Естественно, фальш-панель изготовлена из пластика, и она тоже крепится к корпусу при помощи двух винтов.
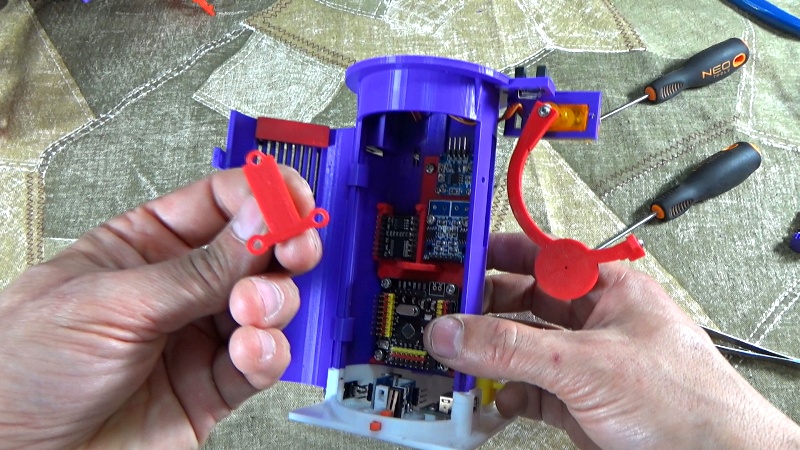
Исключением стал звуковой модуль, в конструкции которого не предусмотрено крепление под винт. Поэтому звуковой модуль фиксируется в специальной нише. Кстати, для его применения необходим динамик, и он отлично вписался в дизайн дверцы.

Усовершенствовал я и передвижную площадку. Концевые выключатели ограничения движения мишеней по рельсам теперь скрыты внутри корпуса. Передача на концевые выключатели от ограничивающих упоров, расположенных на рельсах, происходит через толкатели. Эти толкатели представляют собой две пластиковые полоски, размещенные в пустотелых нишах корпуса площадки.
В конструкции толкателей спроектирован специальный упор, который не позволяет выпадать толкателям из своих ниш.
В перспективе я планирую через USB разъём объединять другие устройства, которые еще предстоит разработать. Пока не стану уточнять, какие именно это будут устройства, скажу лишь, что это будут очень интересные проекты.
