Прикосновение к пустоте. О реактивных ранцах и управляемых скафандрах
Управляемый индивидуальный полет — дело сложное и непредсказуемое. В конце июня я публиковал материал об орнитоптерах, оказавшийся довольно успешным (+68) — и как сама работа над этим постом, так и реакция аудитории заставили меня задуматься, почему индивидуальный летательный транспорт превратился из «мейнстримовой» идеи во времена Леонардо в спортивный и экстремальный изыск в начале XXI века. Гениальный клип группы «Within Temptation», часть съемки в котором ведется с реального вингсьюта, снят на песню «Dangerous» (Опасный) и ярчайшим образом передает «прикосновение к пустоте», присущее спортивному полету.
Параллельно конструированию орнитоптеров развивается другая технологическая идея для индивидуального полета — реактивные ранцы. Славная история этих устройств неплохо разобрана на Хабре, любителям картинок и видео рекомендую посмотреть этот пост. Ниже я вкратце охарактеризую технологию реактивного ранца и расскажу о значительно более интересном изобретении, которое от него произошло — управляемом космическом скафандре.
Реактивный ранец и управляемый скафандр
Февральский пост о реактивных ранцах, на который я ссылаюсь выше, интересно описывает их как спортивную экипировку. Реактивный ранец опасен, прежде всего, для своего носителя — это не самолет, где пилот может доверить часть работы приборам, и из которого в крайнем случае можно катапультироваться или спрыгнуть с парашютом. Первая концептуальная модель реактивного ранца, по-видимому, была предложена в 1919 году Александром Федоровичем Андреевым, рассмотрена и далее дорабатывалась изобретателем до 1928 года, но так и осталась чертежом. Андреев полагал, что применяться его модель должна, прежде всего, в военно-разведывательных целях: «На позиции с помощью аппарата можно делать воздушную разведку с большей безопасностью чем на аэроплане…целые воинские части будучи снабжены этими аппаратами (стоимость которых при фабричном производстве будет в несколько раз дороже винтовки) при наступлениях вообще и осаде крепостей минуя все земные препятствия могут перелететь совершенно свободно в тыл неприятеля». Тогда проект оказался нереализуемым из-за технологических сложностей, связанных с преодолением гравитации и уязвимостью пилота. Вкратце охарактеризую их:
Защитная экипировка пилота утяжеляет конструкцию, поэтому приходится корректировать аэродинамические свойства аппарата, что также его утяжеляет;
Условное авиационное топливо в таком ранце взрывоопасно (тем более, если тебя прицельно обстреливают), поэтому ингредиенты для него должны находиться в баках отдельно друг от друга, вступать в химическую реакцию, и уже тогда давать тягу. Хорошим топливом, отвечающим этим требованиям, оказалась перекись водорода;
Большой запас топлива на себе не унести. Современные реактивные ранцы могут находиться в воздухе несколько десятков минут;
Сложно представить себе полигон (камеру, ангар), в котором начинающий пилот мог бы обучаться управлению ранцем. С одной стороны, его можно было бы зафиксировать при помощи длинных страховочных тросов, чтобы он отрабатывал движения. С другой стороны, так было бы очень сложно учесть порывы ветра и научиться маневрировать при полете.
Впрочем, как резюмировано в вышеупомянутой хабростатье, в качестве спортивного транспорта реактивный ранец уверенно развивается. В настоящее время проходят обучение десятки пилотов, ранец в сложенном виде умещается в багажник машины, а впечатляющие облеты, например, вокруг статуи Свободы в 2015 году, привлекают к этой технике внимание публики и инвесторов. Скорость полета на ранце также приближается к 200 км/ч.
Скафандры и капсулы
Вышеизложенные соображения подводят нас к логичной мысли, что недостатки реактивного ранца в основном сводятся к смертельной опасности для пилота (взрыв, падение, попадание в воздушные потоки) и к необходимости сохранять управляемость, в то же время преодолевая гравитацию. Но эти недостатки устраняются сами собой или становятся приемлемыми при работе на орбите и вообще при выходах в открытый космос. Таким образом, реактивные ранцы — это фабрика идей для разработки управляемых космических скафандров.
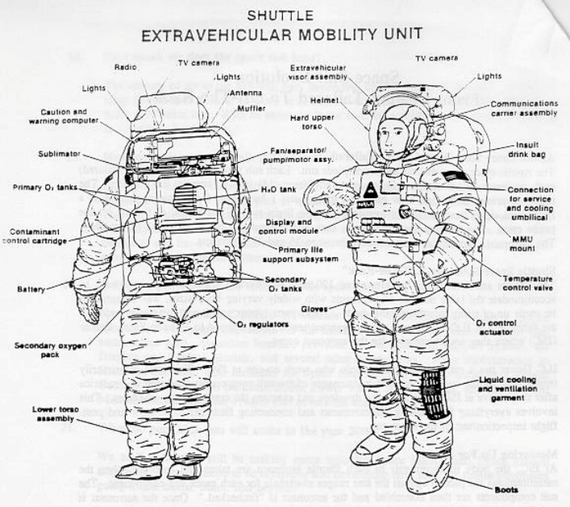
В настоящее время выходы в открытый космос никого не удивляют, для космонавта это просто работа. Но, несмотря на применение страховочных тросов, скафандр остается громоздким и не слишком удобным, а обрыв троса при использовании неуправляемого скафандра — практически верная смерть. Поэтому еще в 1984 году в НАСА опробовали индивидуальный управляемый скафандр, MMU (manned maneuvering unit). С начала нулевых скафандр оснащается микродвигателями, устанавливаемыми на руках и ногах астронавта и позволяющими подплыть к шлюзу в случае обрыва троса. Это — прямое заимствование технологий реактивного ранца при конструировании скафандров. Но в целом эволюция скафандров свидетельствует об их медленном моральном устаревании и необходимости превратить их из гибрида спецодежды и СЖО в индивидуальную космическую капсулу.
Современные громоздкие скафандры уже примерно втрое превышают по массе те костюмы, в которых экипажи «Аполлонов» перемещались по Луне в 1969 и начале 1970-х. Но сам по себе выход в открытый космос в целом опаснее прогулки по Луне, так как на орбите космонавт оказывается во власти ничем не ограниченных первого и третьего закона Ньютона.
Первый закон: «Всякая материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит её (его) изменить это состояние»
Третий закон: «Силы взаимодействия тел равны по величине, направлены вдоль одной прямой и имеют противоположные направления»
Лунная гравитация (как и земная) смягчает оба этих закона, поскольку в первом случае является той силой, что превращает бесконечное прямолинейное движение в приемлемую инерцию, а также является уравновешивающей третьей силой, не допускающей разлет провзаимодействовавших физических тел по модулю этого взаимодействия. На орбите и тем более в открытом космосе вдали от небесных тел гравитация так не работает, поэтому с первым и третьим законом Ньютона должен справляться сам оператор скафандра.
Поэтому сейчас возникают все более серьезные вопросы о том, насколько обычный скафандр пригоден для долгой работы в открытом космосе. Возможно, гораздо лучшим решением была бы капсула, оснащенная манипуляторами и микродвигателями. Американская компания «Genesis Engineering Solutions» из штата Мэриленд в настоящее время занята разработкой «SPS», «одноместного космического корабля», который должен выглядеть так.
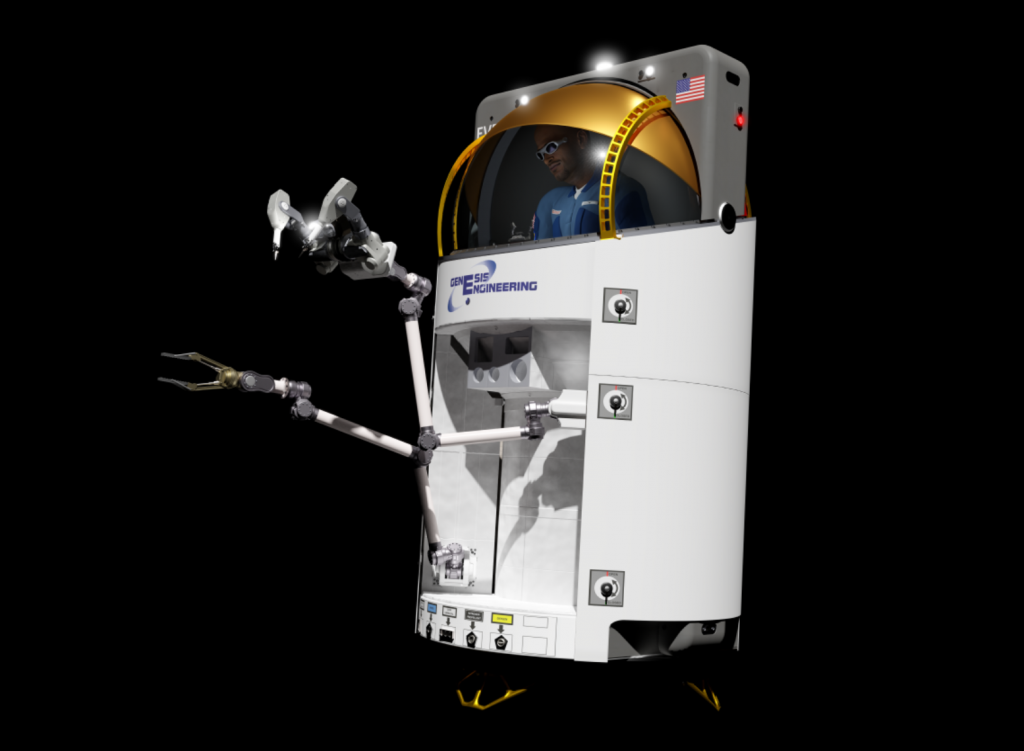
Аппарат оснащается микродвигателями, использующими сжатый азот — негорючий газ. Кроме того, в экстренной ситуации в двигатели может подаваться и обычный воздух из дыхательных баллонов капсулы. Манипуляторы исходно разрабатывались для обезвреживания взрывных устройств, поэтому они по определению значительно более ловкие, чем человеческая рука в толстой перчатке скафандра. Управлять манипуляторами может как сам пилот капсулы, так и удаленный оператор. Предполагается, что такие капсулы могут быть опробованы на «Orbital Reef», коммерческой космической станции, которую собираются в конце 2020-х возвести компании «Blue Origin», «Sierra Space», «Boeing» и другие.
По мнению разработчиков, у такой капсулы сразу несколько преимуществ в сравнении со со скафандром. Во-первых, для капсулы не требуется герметизируемая шлюзовая камера; капсула стыкуется непосредственно со станицей, и воздух у них общий, пока все отверстия и люки капсулы не будут герметично закрыты. Поэтому до выхода в космос пилот может свободно входить в капсулу и возвращаться из нее на станцию. Напротив, когда космонавт в скафандре уже вошел в шлюзовую камеру, из нее необходимо откачать воздух, а при возвращении — вновь накачать. Причем, эти операции невозможно проводить безупречно, поэтому всегда происходят небольшие утечки воздуха.
Еще одно ключевое отличие — в капсуле можно работать при атмосферном давлении. Если же в скафандре довести давление до атмосферного, он становится чрезмерно жестким, а выполнять в таком случае любую относительно тонкую ручную работу вообще невозможно. Поэтому, как правило, давление в скафандре втрое ниже атмосферного. Но в таком случае космонавт бы задохнулся, будь скафандр наполнен обычным воздухом — и вместо воздуха используется чистый кислород.
Одно из опасных следствий такого низкого давления — риск кессонной болезни, при которой в кровотоке образуются пузырьки азота (при нормальном давлении он растворен в крови). Такое вспенивание крови болезненно и приводит к газовой эмболии (закупорке) кровеносных сосудов. Поэтому перед надеванием скафандра космонавтам приходится предварительно дышать чистым кислородом, чтобы вывести из крови азот. Кроме того, чистый кислород в замкнутом пространстве чрезвычайно легко воспламеняется, ярчайшее свидетельство — гибель Валентина Бондаренко, нулевого советского космонавта.
Наконец, капсула выигрывает у скафандра и по третьему важнейшему показателю — в защите от мелких острых частиц космического мусора (осколков) или от микрометеоритов. Если такая частица прошьет скафандр, космонавт в считанные секунды окажется в вакууме, и его биологические жидкости вскипят.
Скафандры становятся все больше. Что с этим делать
Итак, традиционные скафандры являются громоздкими системами жизнеобеспечения, плохо управляются. Пусть и можно выполнять рутинную техническую работу на орбите, такие костюмы были бы крайне неудобны для путешественника или исследователя, а тем более — для серьезных физических нагрузок, например, бега или боя. Вес скафандра будет резко меняться в зависимости от того небесного тела, на котором высадится космонавт, тогда как мышечная сила человека не изменится. Соответственно, скафандры для работы в невесомости и для долгого пребывания в гравитации должны значительно отличаться в конструктивном отношении, а также предусматривать разный уровень терморегуляции и противорадиационной защиты.
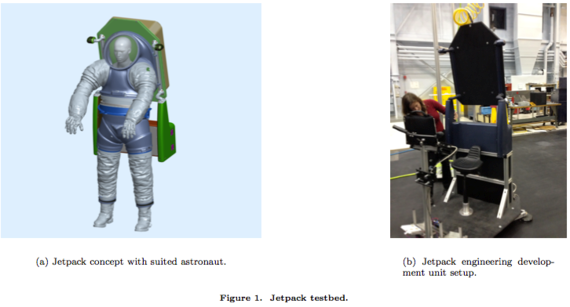
С 2013 года в знаменитой научно-исследовательской лаборатории Дрейпера в Кембридже, штат Массачусетс (совместно с Массачусетским технологическим институтом и Космическим центром им. Линдона Джонсона), разрабатывается гибридная версия скафандра (промежуточная между «планетарным» и «орбитальным» исполнением). Она предназначается для работы на астероидах, например, при геологоразведочных работах, а также для продолжительного ремонта спутников. Важнейшая черта такого скафандра — возможность управляемого полета, обеспечивается полноценным реактивным ранцем. Этот ранец значительно мощнее микродвигателей, устанавливаемых в обычных скафандрах.

Он называется «SAFER», что расшифровывается как «Simplified Aid for EVA Rescue» (упрощенный аппарат для экстренного спасения при выходах в открытый космос). Ранец спроектирован именно как спасательное средство с реактивным двигателем; его следует использовать, если космонавт вдруг отцепится от станции или повредит трос. Управлять этим ранцем и закладывать виражи практически невозможно, но он дает импульс и позволяет уверенно двигаться в нужную сторону.
Кроме того, в рамках проекта SAFER лаборатория Дрейпера разработала спасательный механизм «Take Me Home» — обычную кнопку, заменяющую целый пульт управления. Если космонавт травмируется или почувствует себя плохо, то нажатием одной этой кнопки он переведет скафандр в режим автопилота, чтобы тот автоматически направился на станцию. Кнопку «Take Me Home» можно нажать и удаленно, прямо со станции, если экипаж получит тревожную информацию с датчиков о состоянии космонавта, либо будет визуально заметно, что с человеком что-то не так, а он не выходит на связь.
В настоящее время в лаборатории Дрейпера разрабатывается и новый скафандр, призванный улучшить ситуацию с управляемостью. В нем эффективно используются приборы, похожие на гироскопы, а именно гиродины, вращающиеся инерциальные устройства. По мысли инженеров,
гиродин позволяет контролировать ориентацию в пространстве, гасить крутящий момент
и, соответственно, расширяет спектр двигательных возможностей.
Такая стабильность и возможность быстро менять ориентацию в пространстве и направление движения — критические и пока не реализованные возможности, которые позволили бы не «плавать» в скафандре, а полноценно летать, при этом произвольно переходя на шаг, прыгать (одновременно взлетая) и даже ползать.
Вся эта моторика будет незаменима при исследовании околоземных астероидов, геологических работах на них, а также на спутниках Марса и, в перспективе, на скалах в поясе астероидов. Такие
перспективы требуют приспосабливаться не столько к невесомости, сколько к микрогравитации. Микрогравитация потребует заново осваивать самые тривиальные виды работы — с молотком, сверлом, лопатой. Например, крутящий момент сверла может бросить человека в штопор, а при неосторожной копке можно не рассчитать сил и улететь в космос.
Гиродины и невесомость
Невесомость — это по определению стрессовое состояние для организма. В целом невесомость вредна для здоровья. Отсутствие гравитации провоцирует настоящий хаос в физиологии человека. Мышцы атрофируются, кости также становятся менее прочными, может развиваться дезориентация в пространстве и неустойчивость, сохраняющиеся в течение долгого времени по возвращении на Землю. Кроме того, как упоминалось выше, в невесомости третий закон Ньютона (сила действия по модулю равна силе противодействия) никак не компенсируется, поэтому все движения должны быть строго выверены.
Для решения всех этих проблем и разработаны гиродины, именуемые в англоязычных источниках «CMG» (control moment gyroscopes), что можно перевести как «безупорный силовой гироскоп». Всем знакомы сенсорные гироскопы, устанавливаемые в смартфонах и других устройствах, но в отличие от них гиродин — не датчик, а исполнительный механизм. В нем вращающаяся масса выполняет роль ротора и применяется либо для вращения объекта в нужном направлении, либо для противодействия такому вращению. Гиродин — это, прежде всего, стабилизирующее устройство, и этот аспект его физики раскрыт в хабростатье «Как опереться на пустоту» от Филиппа Терехова @lozga.
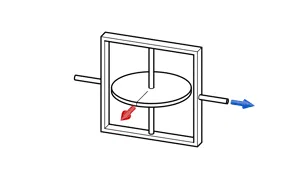 На этой иллюстрации показан одностепенный гиродин, использующий угловой момент вращающейся массы (в центре) для получения вращения. Подвес, обозначенный на этой иллюстрации синей стрелкой, позволяет сгенерировать вращательное усилие в направлении, показанном красной стрелкой. Тело, прикрепленное к гиродину, будет вращаться вокруг оси, совпадающей с красным вектором (в данном случае — по часовой стрелке). ИЛЛЮСТРАЦИЯ ДЖЕЙМСА ПРОВОСТА
На этой иллюстрации показан одностепенный гиродин, использующий угловой момент вращающейся массы (в центре) для получения вращения. Подвес, обозначенный на этой иллюстрации синей стрелкой, позволяет сгенерировать вращательное усилие в направлении, показанном красной стрелкой. Тело, прикрепленное к гиродину, будет вращаться вокруг оси, совпадающей с красным вектором (в данном случае — по часовой стрелке). ИЛЛЮСТРАЦИЯ ДЖЕЙМСА ПРОВОСТА
Гиродины — хорошо изученные устройства, в настоящее время применяются как на многих спутниках, так и на МКС. Но именно в вышеупомянутой лаборатории Дрейпера заняты разработкой сравнительно компактных моделей подобного прибора — чтобы космонавт мог нести на себе такой гироскоп, а прибор получился достаточно мощным и позволил воспроизвести в невесомости важнейшие качества гравитации. Так, гиродин за спиной мог бы компенсировать движения человека, а эффект нежелательных и беспорядочных движений просто гасить, уменьшая долгосрочное воздействие невесомости. Аналогичными модулями-гироскопами можно было бы оснащать и индивидуальные реактивные ранцы. Они бы значительно стабилизировали движения человека и при ремонтных работах в космосе, и при движении по астероиду, и при исследовании других непривычных локаций. Кроме того, такой аппарат мог бы улучшать координацию человека в космосе.
Специалисты Дрейперовской лаборатории в коллаборации с MIT и компанией «David Clark Co» из Уорчестера, штат Массачусетс, также разработали рабочий космический костюм V2Suit Variable Vector Countermeasure Suit, «противонагрузочный костюм для движения в разных направлениях».

Основное преимущество такого костюма — в том, что он оснащен небольшими направляющими модулями, по одному на верхний и нижний отдел каждой конечности. В каждом модуле работает система сенсоров, отслеживающих ориентацию конечности, ее линейное и вращательное движение. На поясе расположен еще один модуль, в нем содержатся процессор и блок для питания всей системы, а также четыре гиродина, препятствующих нежелательному вращению. Процессор регулирует и корректирует работу гиродинов.
В качестве рабочей массы в таких гиродинах используется цилиндрическое тело, вращающееся с постоянной скоростью. Такой ротор закреплен на подвесе. Подвес может поворачиваться, при этом меняется ось вращения ротора. Ротор, скорость вращения которого легко доводится до 15000 оборотов в минуту, может легко менять собственную ось вращения, что, в свою очередь, влияет на направление крутящего момента.
Модуль можно запрограммировать так, чтобы он расценивал произвольное заданное направление как «внизу». В результате движущийся гиродин сгенерирует сопротивление подходящей силы, когда космонавт станет двигаться в противоположном направлении, то есть «вверх». Допустим, если «внизу» у нас находится пол отсека, а космонавт поднимает руку к потолку отсека, то гиродины на этой руке сразу сгенерируют сопротивление — и человек почувствует аналог гравитации, которую нужно преодолевать, чтобы поднять руку. Согласно поставленным опытам, этот эффект может ощущаться не только как гравитация, но и как плавательное движение сквозь вязкую жидкость.
Конечно, это не антигравитация. Костюм не защищает от морской болезни, которая может возникать в невесомости, не позволяет справиться с атрофией мышц и выводом кальция из костей –, но позволяет космонавту увереннее справляться с нагрузками, в том числе, при занятиях спортом на МКC. Для решения аналогичных задач применяются индивидуальные центрифуги, а также разработанный в СССР эластичный нагрузочный костюм «Пингвин».
Поэтому на данном этапе развития гиродин — это инструмент улучшения координации и «гравитационный протез» для мозга. Мозг, управляя опорно-двигательным аппаратом, по умолчанию учитывает гравитацию, поэтому при ее резком или постоянном отсутствии мы ощущаем свободное падение. С другой стороны, после возвращения из орбитального полета на Землю к гравитации приходится привыкать заново, и нагрузочные костюмы облегчают такую обратную адаптацию.
Остается посмотреть, удастся ли сконструировать достаточно мощные, точные и при этом компактные гиродины, которые позволили бы аналогичным образом компенсировать отсутствие гравитации при работе в космосе. Также пока не решен вопрос долговременного энергоснабжения такого костюма, поэтому индивидуальные космические камеры как альтернативное направление, пока, возможно, более перспективны. Мне представляется, что, изыскивая способы имитировать гравитацию, мы также учимся индивидуальному управляемому полету — навыку, исключительно важному при дальнейшем развитии пилотируемой космонавтики.
