Походка гусеницы и липкость геккона: новый мягкий робот-альпинист

Нам всегда есть чему поучиться у природы. Многие технологии, которые стали обыденностью в нашей жизни, являются тому подтверждением. Если же говорить про робототехнику, то тут фантазия инженеров практически безгранична, и в результате мы видим и роботов-собак, и роботов-рыб, и роботов-птиц. Но визуальным сходством с природными эквивалентами дело не заканчивается. Каждый живой организм можно назвать системой, все детали которой выполняют определенные функции, тем самым работая на благо организма. Понимание того, как те или иные функции реализуются, позволяют инженерам их воссоздать, используя рукотворные творения. Ученые из университета Уотерлу (Канада) решили воссоздать в роботизированном виде гекконов, а точнее их способность перемещаться по стенам и потолкам. Какова структура робота, насколько он хорошо имитирует гекконов, и может ли он удержаться на потолке вниз головой? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Многие существа, населяющие Землю, обладают способностью лазать по практически любой поверхности, хоть по стенам, хоть по потолку. Как правило, такое умение обусловлено микроструктурой поверхности их биологической ткани. Касательно именно гекконов, то их неоднократно исследовали, дабы в точности описать механизмы, позволяющие им цепляться за поверхность. Мы даже знакомились с одним из таких трудов в статье «Липкие гекконы: адгезионный липидный слой».
Имитация сложной структуры тканей и подвижного поведения живых существ, способных лазать, дало бы возможность разработать биомиметических мягких роботов, которые могли бы добраться туда, куда «жестким» роботам дороги нет.
Изображение №1
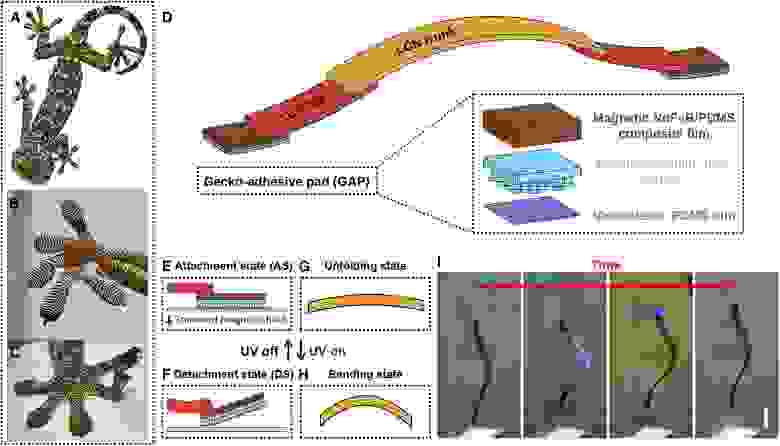
Геккон обладает исключительными способностями к лазанию, связанными с динамическим поведением прикрепления/отсоединения его пальцев, которые оснащены уникальной иерархической планарной микроструктурой (фолликулярные клетки и волоски), обеспечивающей значительные силы Ван-дер-Ваальса для гибкого сцепления с различными поверхностями (1A).
Попытки перенести этот механизм на жестких роботов были, но не особо успешны. Конвенциональные роботы лишены той гибкости, которая присуща гекконам, что сильно ограничивает их подвижность. Что касается мягких роботов, то им требуется не только подножка, обладающая динамическим креплением/отсоединением на различных поверхностях, но и деформируемое мягкое тело. Сейчас существует много вполне работоспособных лазающих мягких роботов, способных передвигаться по обычным поверхностям с различными углами наклона, используя различные стратегии. В частности, такие роботы были созданы за счет интеграции пневматически / электростатически липких ног с мягкими мышечными приводами, но для поддержания стабильной адгезионной способности на различных поверхностях необходимо большое количество энергии.
Благодаря преимуществам программируемой конструкции интеллектуальных материалов, настраиваемой эластичности, анизотропной деформации, легкой миниатюризации и чувствительности к раздражителям (свет, тепло, электрическое/магнитное поле, влажность или pH) жидкокристаллические сети (LCN от liquid crystal network) были использованы для имитации управляемой мягкой мышцы пальца лапки геккона для эффективного прилипания/отлипания (1B и 1C). В дополнение к электрическому полю, для которого нужны провода, использовались также и бесконтактные стимулы (тепло и свет). Однако достичь непрерывной работы (лазанья по отвесным поверхностям) без привязки ко внешнему блоку системы питания так и не удалось. Другими словами, существует необходимость в разработки системы, которая может быть дистанционно управляема.
В рассматриваемом нами сегодня труде ученые продемонстрировали мягкого робота, который обладает способностью прикрепления/отсоединения, как у гекконов, и возможностью перемещаться, как гусеница-землемерка (гусеница, у которой есть только 2 пары ног — грудные и брюшные).
Структура робота
Объединив биологические принципы адгезии геккона и метод передвижения землемерки, ученые разработали биомиметического мягкого робота (GeiwBot), состоящего из LCN туловища и ноги, а также GAP (от gecko adhesive pads, т. е. адгезионные подушечки геккона) (1D).
GAP был разработан в соответствии с данными из литературы и собственными исследованиями ученых. Массив грибовидных столбов (MPA от mushroom-pillar array) был изготовлен из PDMS, который может обеспечить повышенную податливость межфазного контакта за счет механизмов расщепления контакта и деформации изгиба микростолбиков в процессе предварительной нагрузки и захвата трещин, связанных с большим растягивающим напряжением микростолбиков во время процесса отсоединения.
Для повышения адгезионных характеристик GAP грибовидные столбики заканчиваются тонкой вязкоупругой пленкой PDMS, что приводит к функциональному градиенту как геометрической структуры, так и механической структуры вдоль оси глубины.
Другим ключевым компонентом является магнитная композитная пленка NdFeB/PDMS, которая приклеивается к верхней поверхности MPA и создает усилие предварительной нагрузки (FPreload), позволяющее подушечке стабильно прилипать к различным поверхностям в переходном магнитном поле в состоянии прикрепления (AS от attachment state) (1E). Чтобы имитировать принципы передвижения геккона, ученые объединили GAP с фоточувствительным LCN в качестве ноги и туловища робота GeiwBot. Благодаря обратимому фотоуправляемому изгибу LCN, выровненных под углом, нога обеспечивает подъемную силу (FLift), которая может преодолеть прилипание GAP к подложке в состоянии отсоединения (DS от detachment state) (1F), а туловище реализует периодическую деформацию изгиба, напоминающую движения землемерки (1G и 1H).
Характеристики GAP

Изображение №2
Чтобы подтвердить концепцию, были исследованы характеристики чувствительной к давлению адгезии GAP с целью получения взаимосвязи между усилием отсоединения (FPull-off) и FPreload во время цикла движения (2A). PDMS был выбран в качестве полимерной матрицы для сборки GAP с иерархической структурой из-за его простого производственного процесса, регулируемого модуля и сильных межфазных взаимодействий.
Чтобы построить GAP, ученые сначала изготовили MPA методом шаблона на основе GeckoTape ленты, что обеспечило достаточную адгезию для крепления мягкого робота. Затем гладкая поверхность и грибообразная поверхность MPA были покрыты магнитной композитной пленкой NdFeB/PDMS и тонкой вязкоупругой пленкой PDMS соответственно. Иерархическая структура подготовленного GAP была подтверждена с помощью сканирующего электронного микроскопа под разными углами (2B и 2C). На виде сбоку (2B) трехслойная структура GAP представляет собой однородный MPA со средним диаметром 75 мкм и высотой 150 мкм. На виде сверху (2C) видно, что диаметр столбика и расстояние между центрами MPA равны 145 и 160 мкм соответственно. Несмотря на то, что MPA заканчивается тонкой вязкоупругой пленкой PDMS, его геометрические особенности по-прежнему сохраняются, как показано белым пунктирным кругом справа на 2C. GAP демонстрировал адгезионное поведение, чувствительное к давлению (2D).
При FPreload в 50 мН GAP может давать FPull-off в 108 мН на стеклянной подложке. При увеличении FPreload до 200 мН соответствующий FPull-off достигает 244 мН. Для различных подложек (стекло, полиимид и алюминий) GAP показал различную адгезионную прочность (FPull-off) даже при одинаковом FPreload (2E). Это связано больше с шероховатостью поверхностей подложек, а не с их составом.
Для повышения FPreload в локальной области для хорошей контактной адгезии была применена сила магнитного притяжения (FMagnet) с использованием переходного магнитного поля путем смещения постоянного магнита под GAP. Магнит может обеспечить FMagnet в 200 мН при смещении на 1 мм (2F), что достаточно для обеспечения хорошей адгезионной прочности GAP, прикрепленного к различным подложкам.
Характеристики LCN туловища и ног
Изображение №3
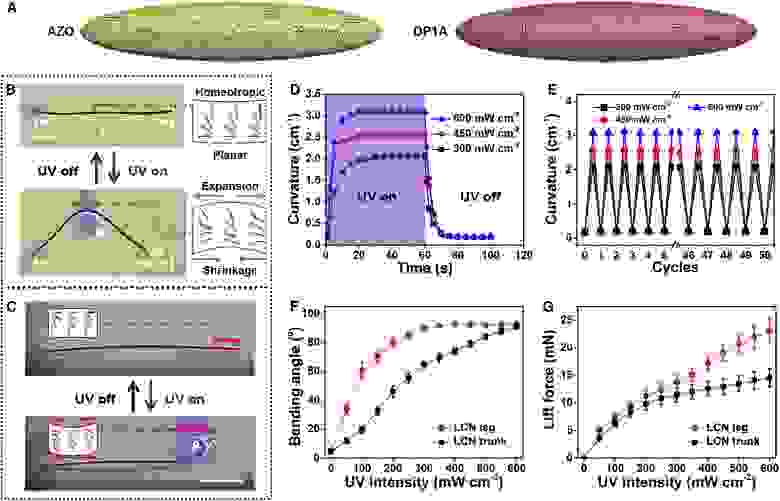
В качестве мягкого привода туловища и ног робота использовался вышеупомянутый светочувствительный LCN, содержащий мономеры азобензола (3A).
Как показано на 3B и 3C, исходные LCN, выровненные по наклону, были вырезаны вдоль плоскостного направления до ширины 3 мм. Эти LCN продемонстрировали обратимое фоточувствительное поведение при изгибе. УФ-свет (диаметром 4 мм) использовалось для локального стимулирования деформации изгиба LCN, позволяя дистанционно манипулировать фоточувствительным LCN. В случае облучения средней части LCN туловища кривизна локальной деформации изгиба (1/R, где R — радиус кривизны) вызывает смещение (∆L) между двумя концами туловища от начального состояния (L0) в фотостационарное состояние (PSS от photo-stationary state) (LPSS; 3B). При облучении края LCN ноги деформация изгиба кончика может создать достаточную подъемную силу (FLift), чтобы преодолеть прилипание GAP к субстрату (3C).
Как показано на 3D, кривизна области изгиба LCN туловища, которая может быть использована для описания степени деформации изгиба, увеличивалась со временем при воздействии УФ-излучения, достигнув в конечном итоге 3.1 см за 20 секунд при PSS после УФ-облучение в 600 мВт/см2. С увеличением интенсивности УФ кривизна увеличивалась, а время отклика ускорялось из-за более высокой выходной энергии фотонов. После прекращения воздействия УФ-излучения через 20 секунд происходила тепловая релаксация, в течение которой кривизна восстанавливалась до 90–95% исходного состояния, но не до 100%, так как имеются определенные остаточные внутренние напряжения, вызванные фотохромным азобензольные звенья.
Кроме того, такая обратимая деформация может повторяться в течение не менее 50 циклов при различной интенсивности УФ-излучения, что указывает на превосходную прочность фоточувствительных LCN (3E).
Выходная плотность работы (на единицу объема) изгибающихся приводов может быть описана как E∙ε2/2, где E — модуль упругости, а ε — локальная деформация. Это говорит о том, что FLift кончика LCN тесно связан с углом изгиба (q), который определяется через ε. Чтобы обеспечить достаточную FLift для реализации динамического отделения GAP от подложки, акрилат красителя DR1A был добавлен в LCN плечо, чтобы увеличить фотомеханическую деформацию кончика LCN за счет усиленного фототермического эффекта. Это приводит к большему углу изгиба под действием света, чем у LCN туловища (3F). Выходная FLift LCN ноги робота по данным измерений была выше, чем у туловища (3G). Это говорит о том, что LCN нога может обеспечить большую механическую мощность для динамического отделения GAP.
Характеристики биомиметической гибридной конфигурации
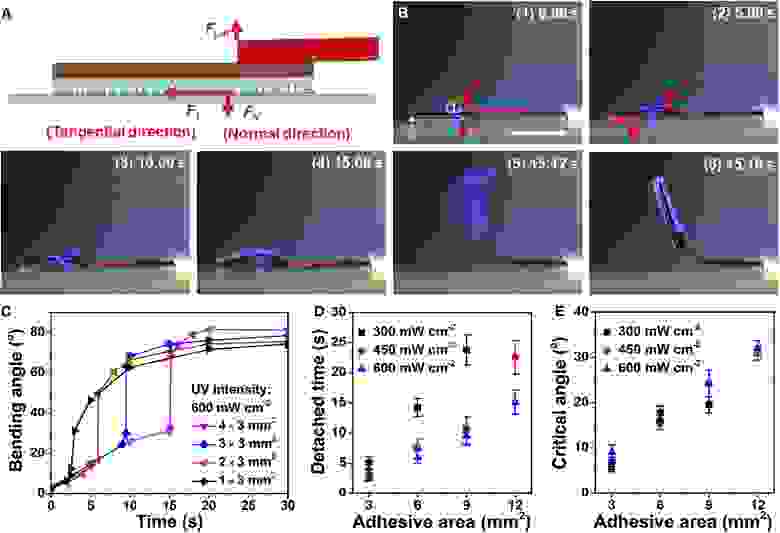
Объединив механические характеристики GAP и LCN ног, ученые смогли подробно описать характеристики биомиметических гибридных конфигураций робота. Для этого GAP и LCN ноги робота были соединенны в одну систему. Из-за несоответствия модуля между материалами PDMS и LCN в тонкой пленке GAP (толщина = 0.725 мм) могут возникать некоторые колебания, что приводит к несовершенному контакту с поверхностью и ослаблению адгезионных свойств GAP. Потому GAP и LCN ноги были спроектированы таким образом, чтобы их можно было соединить вместе только в пределах определенной области (1 × 3 мм2) (4A). Такая конструкция обеспечивает достаточную адгезию для прикрепления GAP, а также передачу FLift от изгибающихся LCN ног для достижения отсоединения.
Изображение №4
На примере клейкой области (4 × 3 мм2), показанной на 4B и видео №1, отдельно стоящий GAP первоначально прикреплялся к стеклянной подложке после приложения FPreload, создаваемого нестационарным магнитным полем (2F), в то время как область GAP приклеивалась чтобы нога слегка висела в воздухе из-за поднятия LCN ноги. При облучении УФ-светом (600 мВт/см2) заблокированный LCN кончик производил восходящую FLift, чтобы преодолеть нисходящий FN GAP в области 1 для начала отсоединения (4B1). В процессе отсоединения GAP видно, что медленно прокручивающееся движение GAP перемещалось из области 1 в область 2 в течение 15.08 с, над которой FLift постепенно отклонялся, чтобы быть перпендикулярным поверхности изгибаемого кончика LCN, помогая при этом преодолеть соответствующую левую FT (4B4–4B6). Этот момент определяется как время отрыва.
Видео №1
Также были исследованы GAP разной длины при одинаковой ширине. Полученный угол изгиба кончика LCN показал, что с увеличением площади адгезии для начала отсоединения под действием света нужно больше времени и больший угол (4C). Повышение интенсивности УФ излучения может ускорить процесс отсоединения (4D), однако критический угол отрыва в основном определялся размером адгезионной геометрии, а не интенсивностью УФ (4E).
Характеристики движения GeiwBot
Основываясь на приведенных выше результатах, эффективная площадь прикрепления GAP имеет положительную корреляцию с силой сцепления, но отрицательную корреляцию со скоростью отсоединения. Чтобы сбалансировать как быстрое, так и эффективное присоединение/отсоединение во время лазания, GAP был сконструирован так, чтобы иметь форму равнобедренного треугольника (5A). Это может обеспечить конечную длину для достаточной адгезии при ускорении процесса отрыва, поскольку ширина зазора уменьшается, когда клейкая часть начинает подниматься. Длина LCN тела была 20 мм, что обеспечивало достаточно эффективное смещение за счет света (∆L/L0) для миниатюризации мягкого робота.

Изображение №5
Чтобы проиллюстрировать локомотивный принцип разработанного биомиметического мягкого робота, на 5B представлен способ бесконтактного приведения в действие, обеспечивающий синергию между динамическим присоединением/отсоединением GAP и деформацией изгиба LCN тела, что реализует движение GeiwBot на горизонтальной плоскости.
Используя переходное магнитное поле на двух GAP, GeiwBot может стабильно прикрепляться к стеклянной подложке (AS) благодаря адгезии, первоначально индуцированной FMagnet (2F и 5B1). Начальные положения левого и правого GAP отмечены 1 и 2, а положения в движении — 1 'и 2'.
При воздействии УФ-излучения (600 мВт/см2) возникающая в результате фотоуправляемая деформация изгиба LCN ноги создает подъемную силу FLift для левой подушечки, чтобы преодолеть адгезию и полностью отделиться от стеклянной подложки (DS), в то время как уменьшенный изгибающий момент правой стороны позволяет правой подушечке оставаться прикрепленной (4B, 5B2 и 5B3).
При перемещении УФ-излучения от левой LCN ноги к LCN туловищу фотоуправляемая деформация изгиба туловища перемещает только левый GAP из-за асимметричного состояния двух GAP (3B и 5B4). Применяя нестационарное магнитное поле на левый GAP, он трансформируется из DS в AS, фиксируя смещение левой подушечки (5B5). При этом деформация изгиба туловища удерживается на том же уровне без необходимости УФ-облучения, так как в АС находятся как левый, так и правый GAP. После того как УФ-излучение стимулирует отсоединение правого GAP (5B6–5B7), асимметричное состояние левого и правого GAP приводит к движению правого GAP, что связано с поведением термической релаксации LCN туловища (5B8). Наконец, переходное магнитное поле подается на правый GAP, чтобы обеспечить переход в стабильный AS всего на стеклянной подложке (5B9).
Видео №2
Как показано на видео выше, GeiwBot постоянно перемещался вправо, повторяя вышеописанный процесс. В течение 350 секунд смещение GeiwBot составило 30 мм, что примерно в 1.5 раза превышает длину его основного тела (туловище LCN) (5C). Учитывая конструкционные особенности робота, он также может двигаться и в обратном направлении (т. е. влево).
GeiwBot на практике

Изображение №6

Изображение №7
Далее ученые провели опыты, в которых робот должен был перемещаться по горизонтальной поверхности (изображение №6, видео №3 и №4) и по потолку (изображение №7, видео №5).
Видео №3Видео №4Видео №5
Стоит отметить, что робот иногда срывался с поверхности, вероятно, из-за мгновенной механической нестабильности, вызванной движением отрыва. Чтобы обеспечить устойчивую работу управляемого светом отделения GAP, магнитное поле можно при необходимости одновременно приложить и к другому GAP, чтобы помочь стабилизировать его адгезию (6A2 и 6A7).
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые, вдохновившись гекконами и землемерками, создали необычного мягкого робота, способного перемещаться по вертикальным поверхностям, и даже по потолку.
GeiwBot, как его прозвали разработчики, визуально напоминает землемерку, у которой имеются две пары лапок (спереди туловища и сзади), в отличие от других гусениц. Движение робота, как и движение землемерки, осуществляется в определенной последовательности: задняя часть тела отрывается от поверхности, пока передняя остается прикрепленной, потом туловище переносится (так называемый шаг), и задняя часть снова крепится к поверхности, а передняя открепляется и т. д. Утрировано говоря, такая гусеница шагает всем своим телом.
Основными силами, которые воздействовали на робота, приводя в движение его части, были ультрафиолетовое облучение и передвижное магнитное поле. Как отмечают ученые, это первый в своем роде мягкий робот, который не требует подключения к внешнему источнику питания, что обеспечивает удаленную работу и универсальность для потенциальных приложений. В конструкции робота использовались жидкокристаллические эластомеры и синтетические клейкие подушечки. Светочувствительная полимерная полоска имитировала деформацию туловища, как у гусеницы, а подушечки на обоих концах робота обеспечивали адгезию к поверхности.
В будущем ученые намерены усовершенствовать своего робота, сделав его управляемым исключительно за счет света, исключив магнитное поле. Также они хотели бы заменить ультрафиолетовое излучение на ближнее инфракрасное. Тем не менее уже сейчас подобный робот является своего рода революционным, так как его предшественники не могли работать без подключения к какому-либо внешнему блоку питания/управления. Подобная беспроводная конструкция позволяет расширить диапазон потенциального применения робота, сделав его крайне полезным, к примеру, во время спасательных и поисковых операциях.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5–2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5–2697v3 2.6GHz 14C 64GB DDR4 4×960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5–2430 2.2Ghz 6C 128GB DDR3 2×960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5–2650 v4 стоимостью 9000 евро за копейки?
