Исследователи создали сверхэластичных червеобразных роботов, «чувствующих» своё окружение
Команда инженеров из Университета Глазго в Великобритании создала роботов, взяв за основу манеру передвижения гусениц и дождевых червей. Роботы увеличивают свою длину в девять раз и имитируют способность червей позиционировать себя в пространстве за счёт мышечного восприятия (проприоцепцию).
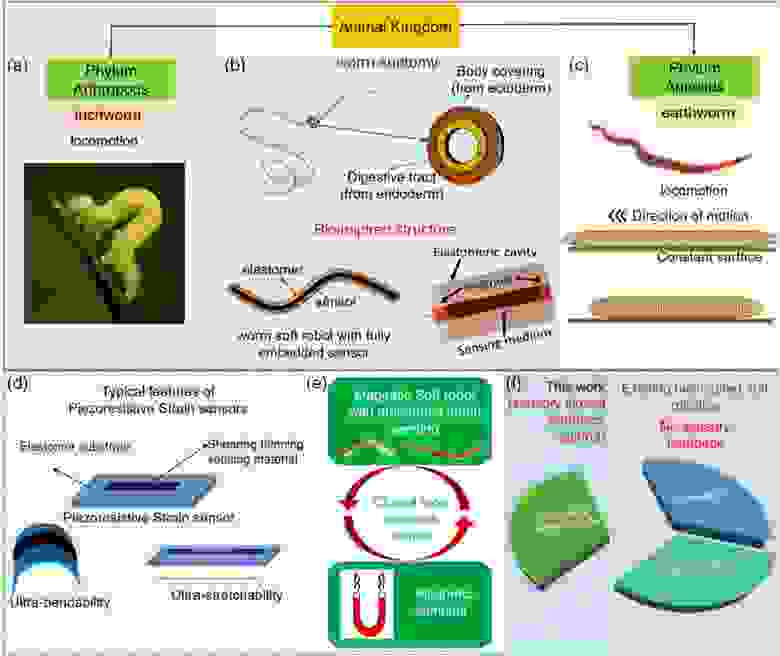 Концепция мягких роботов с встроенными датчиками. (а) передвижение гусеницы. (b) Общая анатомия червеобразных организмов и конструкция и вид поперечного сечения мягкого робота со встроенным датчиком. © Передвижение дождевого червя. (d) типичные особенности пьезорезистивных эластомерных тензодатчиков, e) тема работы исследователей и f) значение этой работы с точки зрения современного уровня техники.
Концепция мягких роботов с встроенными датчиками. (а) передвижение гусеницы. (b) Общая анатомия червеобразных организмов и конструкция и вид поперечного сечения мягкого робота со встроенным датчиком. © Передвижение дождевого червя. (d) типичные особенности пьезорезистивных эластомерных тензодатчиков, e) тема работы исследователей и f) значение этой работы с точки зрения современного уровня техники.
Общая длина роботов составляет примерно 4,5 см. Для их создания авторы объединили собственный сверхрастяжимый мягкий трубчатый тензодатчик (из графитовой пасты и Ecoflex), покрытие из эластомера Ecoflex и магнитный привод. К обоим концам робота прикреплены неодимовые магниты, благодаря которым он передвигается по металлической поверхности.
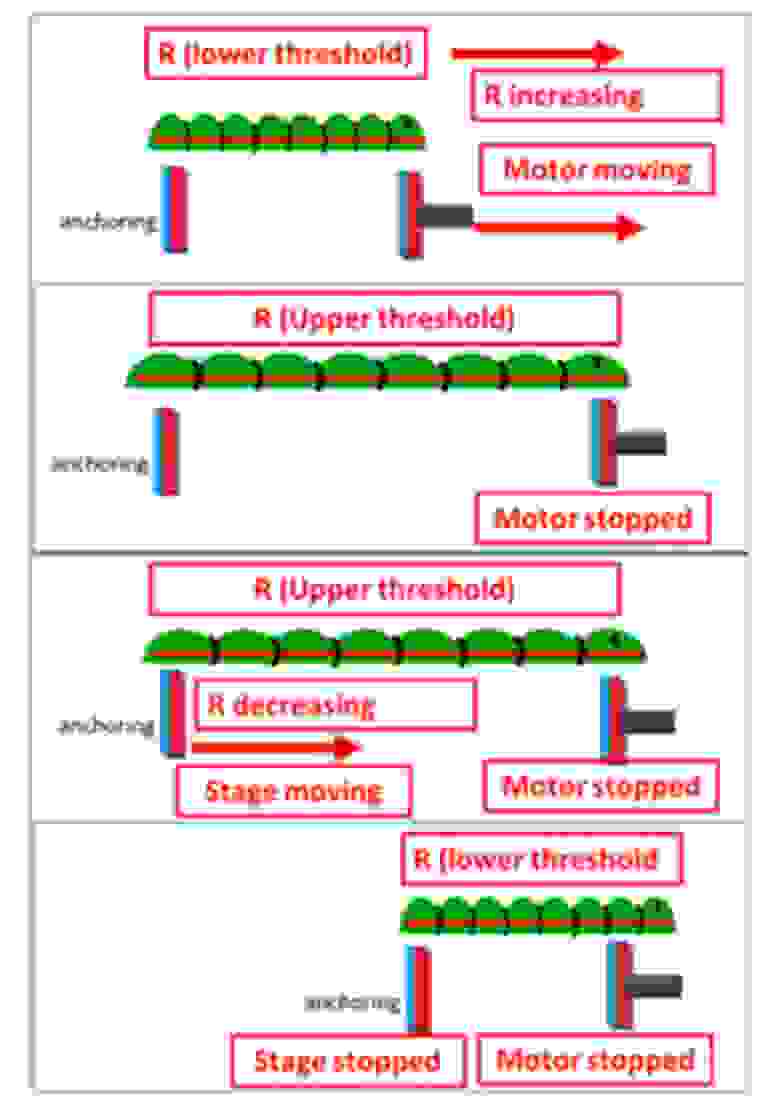
Робот «чувствует» свои движения за счёт измерения электрического сопротивления графитовой пасты, меняющееся по мере перемещения в пространстве. Когда сопротивление достигает максимального заданного значения (до 1150%), тело робота сжимается. Исследователи установили, что материал датчика позволяет телу робота растягиваться до 900% без повреждений и потери чувствительности датчика. При дальнейшем растяжении эластомер лопался. Авторы отмечают, что устройство будет надёжнее работать если не доводить до подобного предела. На рисунке слева отражена схема одного из типов движения.
В общей сложности исследователи создали двух роботов наподобие гусениц и дождевых червей. Роботы-гусеницы при движении ориентируются преимущественно на изгиб датчика, роботы-черви — на растяжение.
Для робота-гусеницы исследователи испытали альтернативный способ управления, при котором магнит был установлен в середине робота. Он работал с меньшим сопротивлением (около 35% относительно изначального положения), но, как отметили авторы, привод с двумя магнитами на обоих концах робота обеспечивает лучшее управляемое перемещение.
Исследователи отмечают, что их роботы впервые демонстрируют аналог проприоцепции в сфере мягкой робототехники. Эта способность позволяет им протискиваться в труднодоступные места, недоступные для других подобных роботов.
Авторы надеются, что технологию возьмут на вооружение для создания роботов, способных искать людей под завалами во время спасательных операций и обёртывать и поднимать предметы сложной формы. Кроме того, технология может пригодится для создания более реалистичных протезов.
Материалы исследования опубликованы в статье «Bioinspired Inchworm- and Earthworm-like Soft Robots with Intrinsic Strain Sensing» в журнале Advanced Intelligent Systems Doi.org/10.1002/aisy.202100092.
