Инвалидное кресло-каталка на электротяге
Два года назад помогал другу с постройкой электро-машинки для дочки, а именно, разрабатывал «контроллер». К концу постройки дочка уже подросла и кататься наотрез отказалась, так проект и забросили, хотя и был практически на ходу. Тогда-то я и задумался поставить на электрический ход имеющуюся у меня инвалидную коляску. Может мой опыт кому-то пригодится в самостоятельной постройке.

За основу было взято инвалидное кресло-каталка, которое у меня осталось от деда. Хотелось ограничиться бюджетным исполнением, и в качестве основных приводов взял двигатели от автомобильных стеклоподъёмников ВАЗ. Заменил задние колеса на пневматические, большего диаметра. Нашел стальной пруток диаметром 20 мм, распилил его на две полуоси. Вырезал кусок фанеры размерами с основание коляски. Далее подобрал подшипники с внутренним отверстием 20 мм под полуоси, прикинул их к основанию из фанеры и обрисовал под них корпуса, которые напечатал на 3Д принтере. Передача вращающего момента осуществлялась зубчатым ремнем. Тут в подробности вдаваться особо не буду, так как вы уже поняли, что вращающего момента у движков не хватило, коляска без груза ехала вполне себе уверенно, но вот с «пассажиром» в 50 кг уже отказывалась.

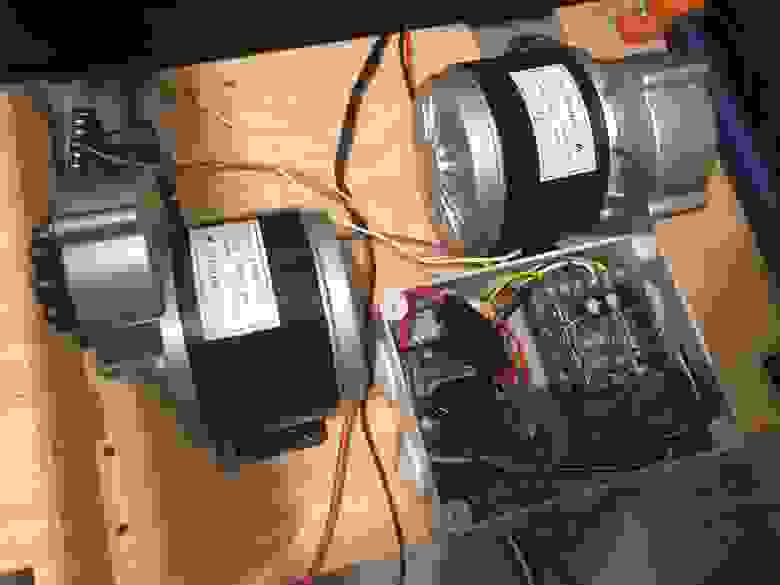
Немного переосмыслив, решил заменить приводную часть, поставить на каждое колесо по мотор-редуктору MY1016Z2 250 ватт 24В с цепным приводом. Вращающего момента теперь вполне достаточно, а скорости и подавно, даже с учетом цепной передачи с передаточным отношением 4. На полуоси закрепил большие звездочки с количеством зубов 40.
В качестве управления выбрал довольно увесистый джойстик. В его основе установлена пара переменных резисторов на 10 кОм. Подключил джойстик к Arduino nano. Управление двигателями осуществлено через двуканальный Н-мостовой драйвер 36В 10А так же подключенный к Arduino nano. Такой драйвер у меня уже не первый, и качество их хромает от производителя к производителю, попадаются и бракованные, в которых один из каналов не работает, но зато в управлении довольно просты. Засунул всю электронику в пластиковую коробку, а джойстик вывел к подлокотнику для удобства управления.

Упрощенная схема, R1, R2 — переменные резисторы на 10кОм, входят в состав джойстика.
Скетч
int Speed = 0;
int Speed2 = 0;
int SpeedZero = 0;
int flag = 0;
void setup() {
pinMode(9, OUTPUT); //шим1
pinMode(10, OUTPUT); //шим2
pinMode(7, OUTPUT); //направление1
pinMode(8, OUTPUT); //направление2
pinMode(4, OUTPUT); //реле
pinMode(13, OUTPUT); //светодиод
Serial.begin(9600);
analogWrite(9,0);
analogWrite(10,0);
digitalWrite(7, 0);
digitalWrite(8, 0);
SpeedZero = analogRead(1);
}
void loop() {
Speed = analogRead(A1);
Speed2 = analogRead(A3);
Serial.println(Speed);
Serial.println(Speed2);
//вперед разад
if (((Speed>450)&&(Speed<550))||((Speed2>450)&&(Speed2<550))){
digitalWrite(4, 0);
analogWrite(9,0);
analogWrite(10,0);
}
if (Speed<449){
digitalWrite(4, 1);
analogWrite(9,50);
analogWrite(10, 50);
digitalWrite(7, 0);
digitalWrite(8, 0);
}
if (Speed>551){
digitalWrite(4, 1);
analogWrite(9,50);
analogWrite(10, 50);
digitalWrite(7, 1);
digitalWrite(8, 1);
}
//////////////////////////
//лево право
if (Speed2<449){
digitalWrite(4, 1);
analogWrite(9,50);
analogWrite(10,50);
digitalWrite(7,1);
digitalWrite(8, 0);
}
if (Speed2>551){
digitalWrite(4, 1);
analogWrite(9,50);
analogWrite(10,50);
digitalWrite(7, 0);
digitalWrite(8, 1);
}
delay(300);
}Питать коляску решил от блока питания 24В 500Вт, так как батарея стоит довольно больших денег, да и на стадии отработки управления, этого питания вполне хватит. Дальше гаража я все равно пока не планирую «выезжать». Есть, конечно, небольшие неудобства питания от провода, но как-нибудь переживу, пока не доведу до нормального состояния использования, а к тому времени может и на аккумулятор накоплю.
Первый выезд.
В прошивке ограничил скорость до минимальной, от плавного ускорения пока отказался. Едет коляска вперёд, назад и поворачивает (вращением колес в разные стороны).
Так как плавности хода нет, то ощущения неоднозначные. Катался недолго, сломалась ступица, напечатанная из пластика. Ох уж эти аддитивные технологии. Силовые детали из пластика буду переделывать на металлические.
Продолжение следует!
Спасибо за внимание.
