Быстрая генерализация маркеров на WebGL-карте

Маркеры — дело полезное. Полезное в разумных количествах. Когда их становится слишком много, польза улетучивается. Как поступить, если требуется отметить на карте поисковую выдачу, в которой десятки тысяч объектов? В статье я расскажу, как мы решаем эту задачу на WebGL-карте без ущерба для её внешнего вида и производительности.
В 2016 году 2ГИС выпустил в бой свой первый проект на WebGL — Этажи: трёхмерные поэтажные планы зданий.

Этажи новосибирского ТЦ Аура
Сразу после релиза Этажей наша команда начала разработку полноценного трёхмерного картографического движка на WebGL. Движок разрабатывался совместно с новой версией 2gis.ru и сейчас находится в статусе публичной беты.

Красная площадь, отрисованная на WebGL. Планы зданий теперь встроены прямо в карту
Любой, кто захочет написать собственный картографический движок, рано или поздно столкнётся с проблемой размещения подписей на карте. Объектов на карте много, и невозможно подписать каждый так, чтобы подписи не пересекались между собой.
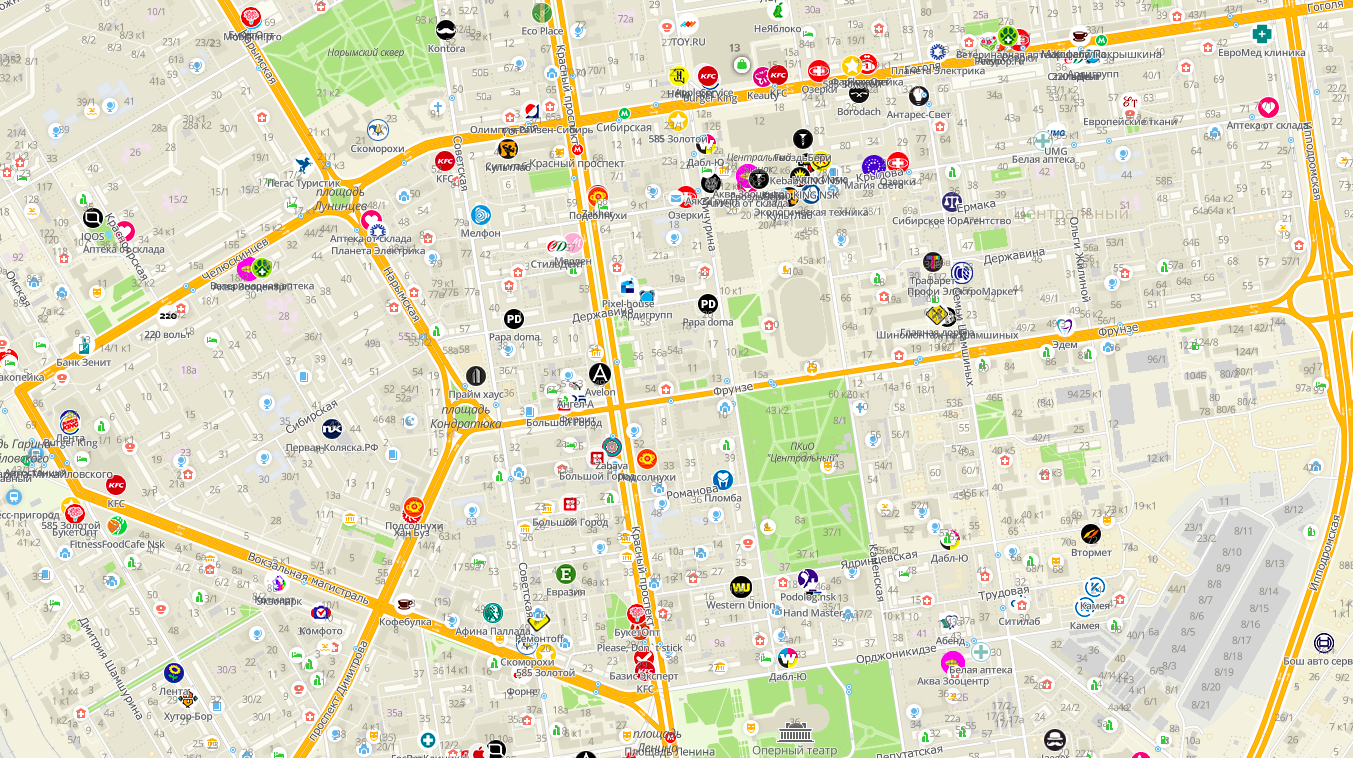
Что будет, если в Новосибирске подписать все объекты сразу
Для решения этой проблемы необходима генерализация подписей. Генерализация в общем смысле — преобразование картографических данных таким образом, чтобы они были пригодны для отображения на мелких масштабах. Её можно делать разными методами. Для подписей обычно применяется метод отбора: из общего числа выбирается некоторое подмножество наиболее приоритетных подписей, не пересекающихся друг с другом.
Приоритет подписи определяется её типом, а также текущим масштабом карты. Например, при мелком масштабе нужны подписи городов и стран, а при крупном масштабе гораздо важнее становятся подписи дорог и номера домов. Часто приоритет названия населённого пункта определяется размером его населения. Чем оно больше, тем важнее подпись.
Генерализация требуется не только для подписей, но и для маркеров, которыми на карте отмечаются результаты поиска. Например, при поиске по запросу «магазин» в Москве найдётся более 15000 результатов. Отмечать их на карте все сразу, — очевидно, плохая идея.
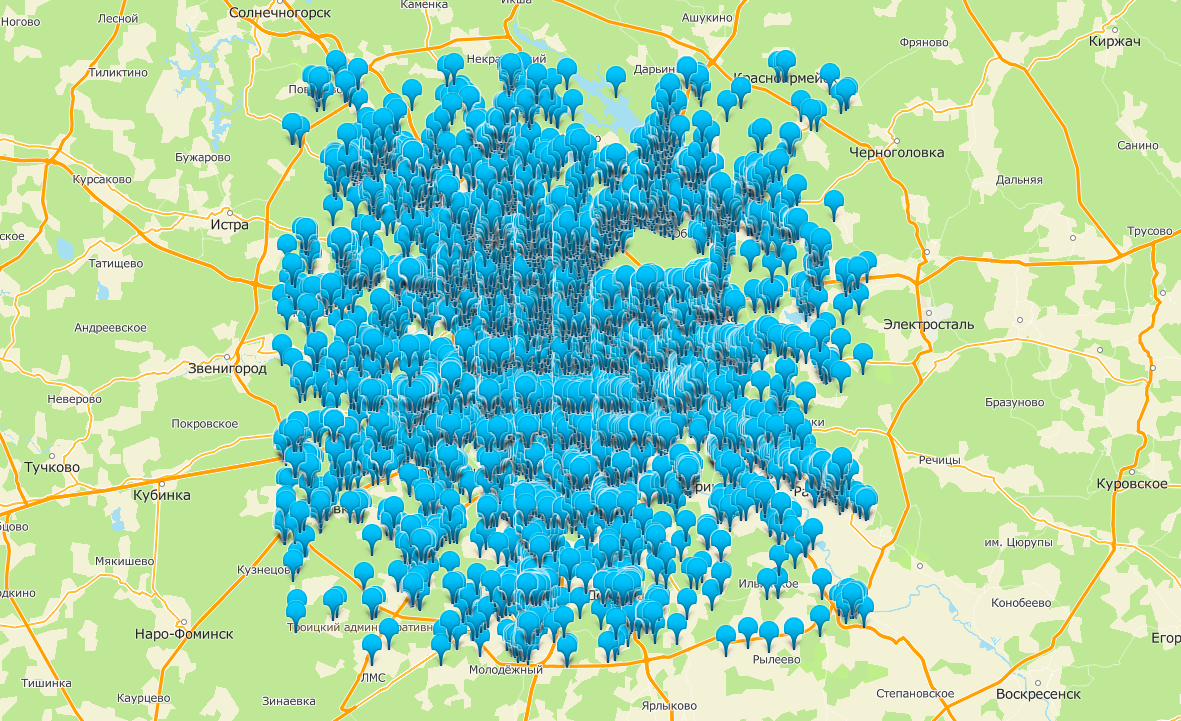
Все магазины Москвы на карте. Без генерализации тут не обойтись
Любое взаимодействие пользователя с картой (перемещение, изменение масштаба, поворот и наклон) приводит к изменению положения маркеров на экране, поэтому генерализацию нужно уметь перерассчитывать на лету. Следовательно, она должна быть быстрой.
В этой статье на примере генерализации маркеров я покажу разные способы решения этой задачи, которые в разное время применялись в наших проектах.
- Спроецировать каждый маркер в плоскость экрана и рассчитать для него баунд — прямоугольную область, которую он занимает на экране.
- Упорядочить маркеры по приоритету.
- Последовательно рассматривать каждый маркер и размещать его на экране, если он не пересекается с другими маркерами, размещёнными перед ним.
С пунктом 1 всё ясно — это просто вычисления. С пунктом 2 нам тоже повезло: список маркеров, который приходит нам с бекенда, уже упорядочен по приоритету алгоритмами поиска. В верх выдачи попадают наиболее релевантные результаты, которые с наибольшей вероятностью будут интересны пользователю.
Главная проблема — в пункте 3: от того, как он реализован, может сильно зависеть время расчёта генерализации.
Для поиска пересечений между маркерами нам необходима некоторая структура данных, которая:
- Хранит баунды добавленных на экран маркеров.
- Имеет метод
insert(marker), чтобы добавить маркер на экран. - Имеет метод
collides(marker), чтобы проверить маркер на пересечение с уже добавленными на экран.
Рассмотрим несколько реализаций этой структуры. Все дальнейшие примеры будут написаны на языке TypeScript, который мы используем в большинстве наших проектов. Во всех примерах маркеры будут представляться объектами следующего вида:
interface Marker {
minX: number;
maxX: number;
minY: number;
maxY: number;
}
Все рассмотренные подходы будут реализациями следующего интерфейса:
interface CollisionDetector {
insert(item: Marker): void;
collides(item: Marker): boolean;
}
Для сравнения производительности будет замеряться время исполнения следующего кода:
for (const marker of markers) {
if (!impl.collides(marker)) {
impl.insert(marker);
}
}
Массив markers будет содержать 100 000 элементов размера 30×50, случайно размещённых на плоскости размера 1920×1080.
Производительность будем замерять на Macbook Air 2012 года.
Тесты и примеры кода, приведённые в статье, также выложены на GitHub.
Для начала рассмотрим самый простой вариант, когда маркер проверяется на пересечение с остальными в простом цикле.
class NaiveImpl implements CollisionDetector {
private markers: Marker[];
constructor() {
this.markers = [];
}
insert(marker: Marker): void {
this.markers.push(marker);
}
collides(candidate: Marker): boolean {
for (marker of this.markers) {
if (
candidate.minX <= marker.maxX &&
candidate.minY <= marker.maxY &&
candidate.maxX >= marker.minX &&
candidate.maxY >= marker.minY
) {
return true;
}
}
return false;
}
}
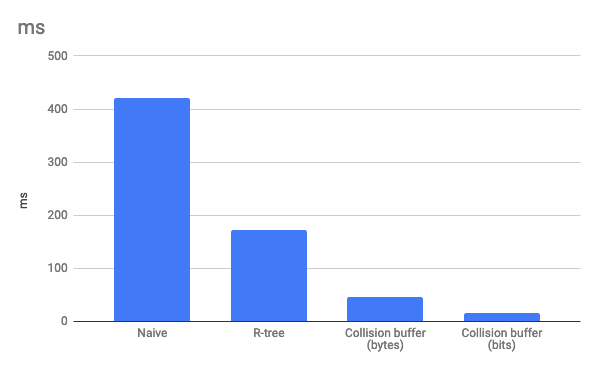
Время расчёта генерализации для 100 000 маркеров: 420 мс. Многовато. Даже если расчёт генерализации идёт в веб-воркере и не блокирует главный тред, такая задержка будет заметна на глаз, особенно с учётом того, что эту операцию необходимо производить после каждого движения карты. Более того, на мобильных устройствах со слабым процессором задержка может быть ещё больше.
Так как в наивной реализации каждый маркер проверяется на пересечение со всеми предыдущими, в худшем случае трудоёмкость этого алгоритма — квадратичная. Можно улучшить её, применив структуру данных R-дерево. В качестве реализации R-дерева возьмём библиотеку RBush:
import * as rbush from 'rbush';
export class RTreeImpl implements CollisionDetector {
private tree: rbush.RBush;
constructor() {
this.tree = rbush();
}
insert(marker: Marker): void {
this.tree.insert(marker);
}
collides(candidate: Marker): boolean {
return this.tree.collides(candidate);
}
}
Время расчёта генерализации для 100 000 маркеров: 173 мс. Значительно лучше. Такой подход мы применили в Этажах (об этом упоминалось в моей предыдущей статье).
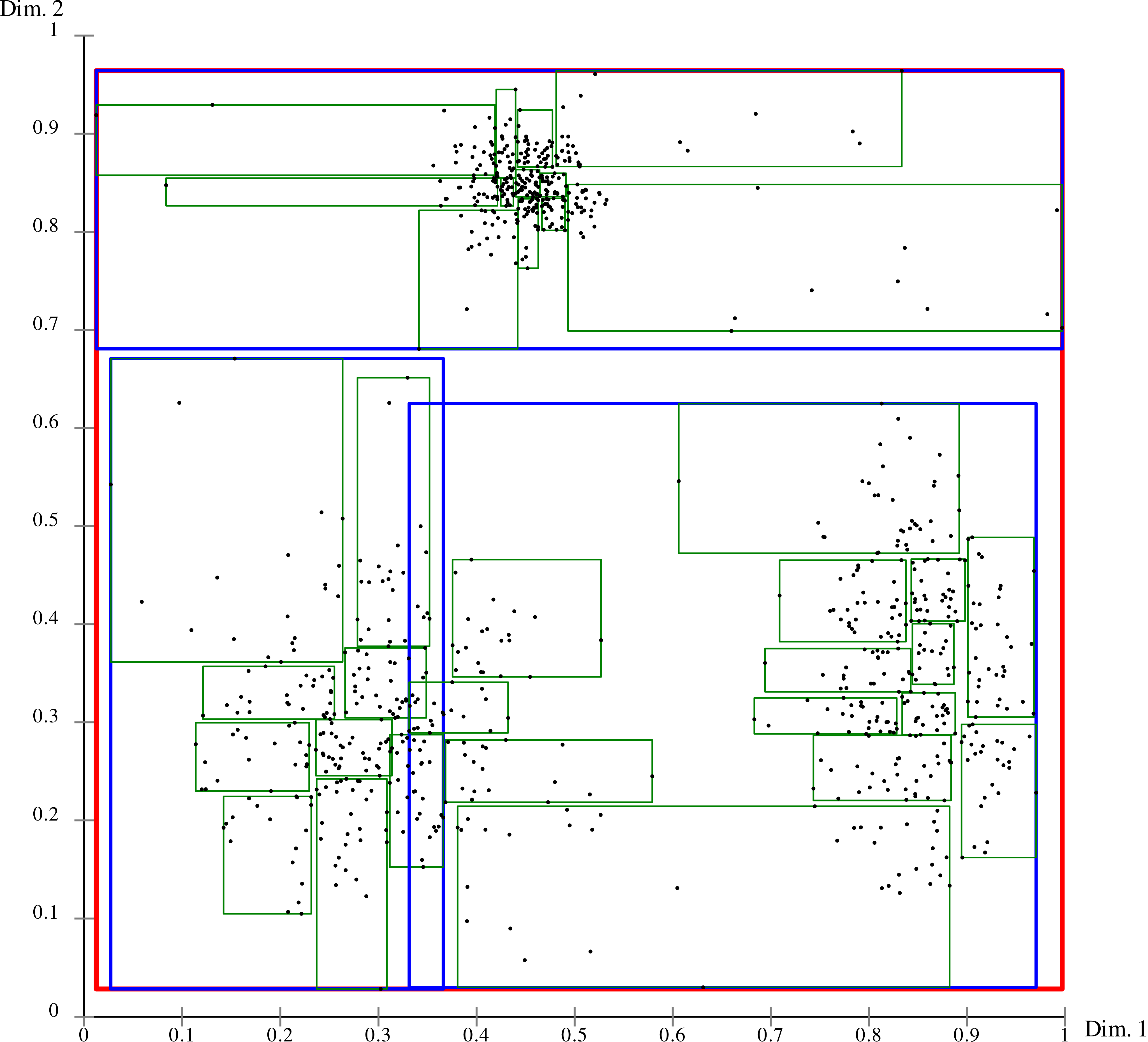
Визуализация хранения точек в R-дереве. Иерархическое деление плоскости на прямоугольники позволяет быстро сужать область поиска и не перебирать все объекты
Отрисовка карты — гораздо более сложная задача, чем отрисовка плана одного здания. Это проявляется и в генерализации. Даже в крупнейших ТЦ мира на одном этаже редко бывает 1 000 организаций. При этом, простой поисковый запрос в крупном городе может вернуть десятки тысяч результатов.
Когда мы начали разработку WebGL-карты, стали думать: можно ли ещё ускорить генерализацию. Интересную идею предложил нам тогда работавший у нас stellarator: вместо R-дерева использовать буфер, в котором хранить состояние каждого пикселя экрана (занят или не занят). При вставке маркера на экран «закрашивать» соответствующее место в буфере, а при проверке возможности вставки — проверять значения пикселей в требуемой области.
class CollisionBufferByteImpl implements CollisionDetector {
private buffer: Uint8Array;
private height: number;
constructor(width: number, height: number) {
this.buffer = new Uint8Array(width * height);
this.height = height;
}
insert(marker: Marker): void {
const { minX, minY, maxX, maxY } = marker;
for (let i = minX; i < maxX; i++) {
for (let j = minY; j < maxY; j++) {
buffer[i * this.height + j] = 1;
}
}
}
collides(candidate: Marker): boolean {
const { minX, minY, maxX, maxY } = candidate;
for (let i = minX; i < maxX; i++) {
for (let j = minY; j < maxY; j++) {
if (buffer[i * this.height + j]) {
return true;
}
}
}
return false;
}
}
Время расчёта генерализации для 100 000 маркеров: 46 мс.
Почему так быстро? Подход этот на первый взгляд кажется наивным, а вложенные циклы в обоих методах не похожи на быстрый код. Однако, если приглядеться к коду повнимательнее, можно заметить, что время исполнения обоих методов не зависит от общего количества маркеров. Таким образом, при фиксированном размере маркеров WxH получим трудоёмкость O (W * H * n), то есть линейную!
Можно улучшить предыдущий подход как по скорости, так и по занимаемой памяти, если сделать так, чтобы один пиксель представлялся в памяти не одним байтом, а одним битом. Код после этой оптимизации, правда, заметно усложняется и обрастает некоторым количеством побитовой магии:
export class CollisionBufferBitImpl implements CollisionDetector {
private width: number;
private height: number;
private buffer: Uint8Array;
constructor(width: number, height: number) {
this.width = Math.ceil(width / 8) * 8;
this.height = height;
this.buffer = new Uint8Array(this.width * this.height / 8);
}
insert(marker: Marker): void {
const { minX, minY, maxX, maxY } = marker;
const { width, buffer } = this;
for (let j = minY; j < maxY; j++) {
const start = j * width + minX >> 3;
const end = j * width + maxX >> 3;
if (start === end) {
buffer[start] = buffer[start] | (255 >> (minX & 7) & 255 << (8 - (maxX & 7)));
} else {
buffer[start] = buffer[start] | (255 >> (minX & 7));
for (let i = start + 1; i < end; i++) {
buffer[i] = 255;
}
buffer[end] = buffer[end] | (255 << (8 - (maxX & 7)));
}
}
}
collides(marker: Marker): boolean {
const { minX, minY, maxX, maxY } = marker;
const { width, buffer } = this;
for (let j = minY; j < maxY; j++) {
const start = j * width + minX >> 3;
const end = j * width + maxX >> 3;
let sum = 0;
if (start === end) {
sum = buffer[start] & (255 >> (minX & 7) & 255 << (8 - (maxX & 7)));
} else {
sum = buffer[start] & (255 >> (minX & 7));
for (let i = start + 1; i < end; i++) {
sum = buffer[i] | sum;
}
sum = buffer[end] & (255 << (8 - (maxX & 7))) | sum;
}
if (sum !== 0) {
return true;
}
}
return false;
}
}
Время расчёта генерализации для 100 000 маркеров: 16 мс. Как видим, усложнение логики оправдывает себя и позволяет ускорить расчёт генерализации ещё почти в три раза.
Важно понимать, что буфер коллизий не является полноценной заменой R-дереву. У него гораздо меньше возможностей и больше ограничений:
- Нельзя понять, с чем именно пересекается маркер. Буфер только хранит данные о том, какие пиксели заняты, а какие нет. Следовательно, невозможно реализовать операцию, которая вернёт список маркеров, пересекающихся с данным.
- Нельзя удалить ранее добавленный маркер. Буфер не хранит данные о том, сколько маркеров находятся в данном пикселе. Следовательно, невозможно корректно реализовать операцию удаления маркера из буфера.
- Высокая чувствительность к размеру элементов. Если попытаться добавить в буфер коллизий маркеры, занимающие весь экран, производительность резко упадёт.
- Работает в ограниченной площади. Размер буфера задаётся при его создании, и невозможно поместить в него маркер, выходящий за пределы этого размера. Поэтому при использовании этого подхода необходимо вручную отфильтровывать маркеры, не попадающие на экран.
Все эти ограничения решению задачи генерализации маркеров не помешали. Сейчас этот метод успешно применяется для маркеров в бета-версии 2gis.ru.
Однако, для генерализации основных подписей на карте требования более сложные. Например, для них нужно делать так, чтобы иконка POI не могла «убить» собственную подпись. Так как буфер коллизий не различает, с чем именно произошло пересечение, такую логику он реализовать не позволяет. Поэтому для них пришлось оставить решение с RBush.
В статье показан путь, который мы прошли от самого простого решения до используемого сейчас.
Применение R-дерева было первым важным шагом, позволившим многократно ускорить наивную реализацию. Оно отлично работает в Этажах, однако по факту мы используем только малую часть возможностей этой структуры данных.
Отказавшись от R-дерева и заменив его простым двумерным массивом, который делает ровно то, что нам нужно, и ничего кроме этого, мы получили ещё больший рост производительности.
Этот пример показал нам, как важно, выбирая решение для задачи из нескольких вариантов, понимать и осознавать ограничения каждого из них. Ограничения важны и полезны, и не стоит их бояться: умело ограничив себя в чём-то несущественном, можно получить взамен огромную пользу там, где она действительно нужна. Например, упростить решение какой-либо задачи, или оградить себя от целого класса проблем, или, как в нашем случае, в разы улучшить производительность.
