[Из песочницы] Простая Bluetooth машинка на Arduino
Широкое распространение и дешевизна платформы Arduino и различных робоплатформ позволило любителям создавать радиоуправляемые машинки на любой вкус. А широкое распространение смартфонов позволило использовать их в качестве контроллеров этих машинок. Главной проблемой для многих любителей Arduino является отсутствие опыта в программировании под Android. Сегодня я расскажу, как легко решить эту проблему, используя среду визуальной разработки android-приложений App Inventor 2.Постройку любой машинки надо начинать с «железа», поэтому вкратце опишу, что использовал для своей машинки: — arduino nano:

— bluetooth module HC-05:

— Z-Mini Motor Sensor Shield L293D:

— 2WD Motor Chassis:

Конфигурация «железа» не играет большой роли в этом проекте, поэтому шасси, шилд и саму ардуино можно заменить на любые аналоги.
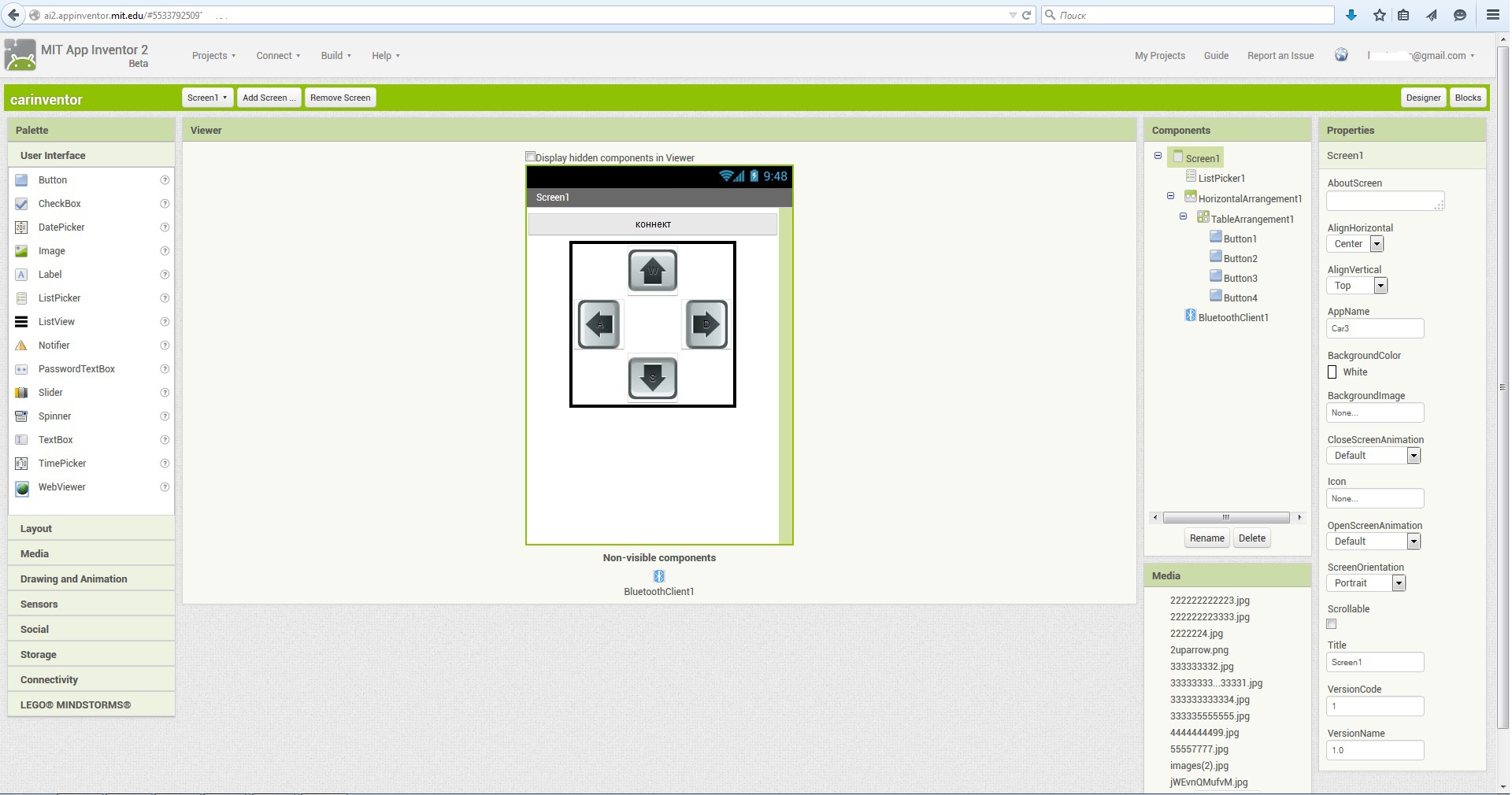
Теперь перейдем к созданию приложения для Android. App Inventor — среда визуальной разработки android-приложений, работает из браузера. Заходим на сайт, разрешаем доступ к своему аккаунту в Google, нажимаем кнопку «create» и создаем новый проект. В новом проекте методом «Drag and Drop» создаем 4 кнопки для выбора направления движения и одну для подключения к нашему bluetooth модулю. Примерно так:
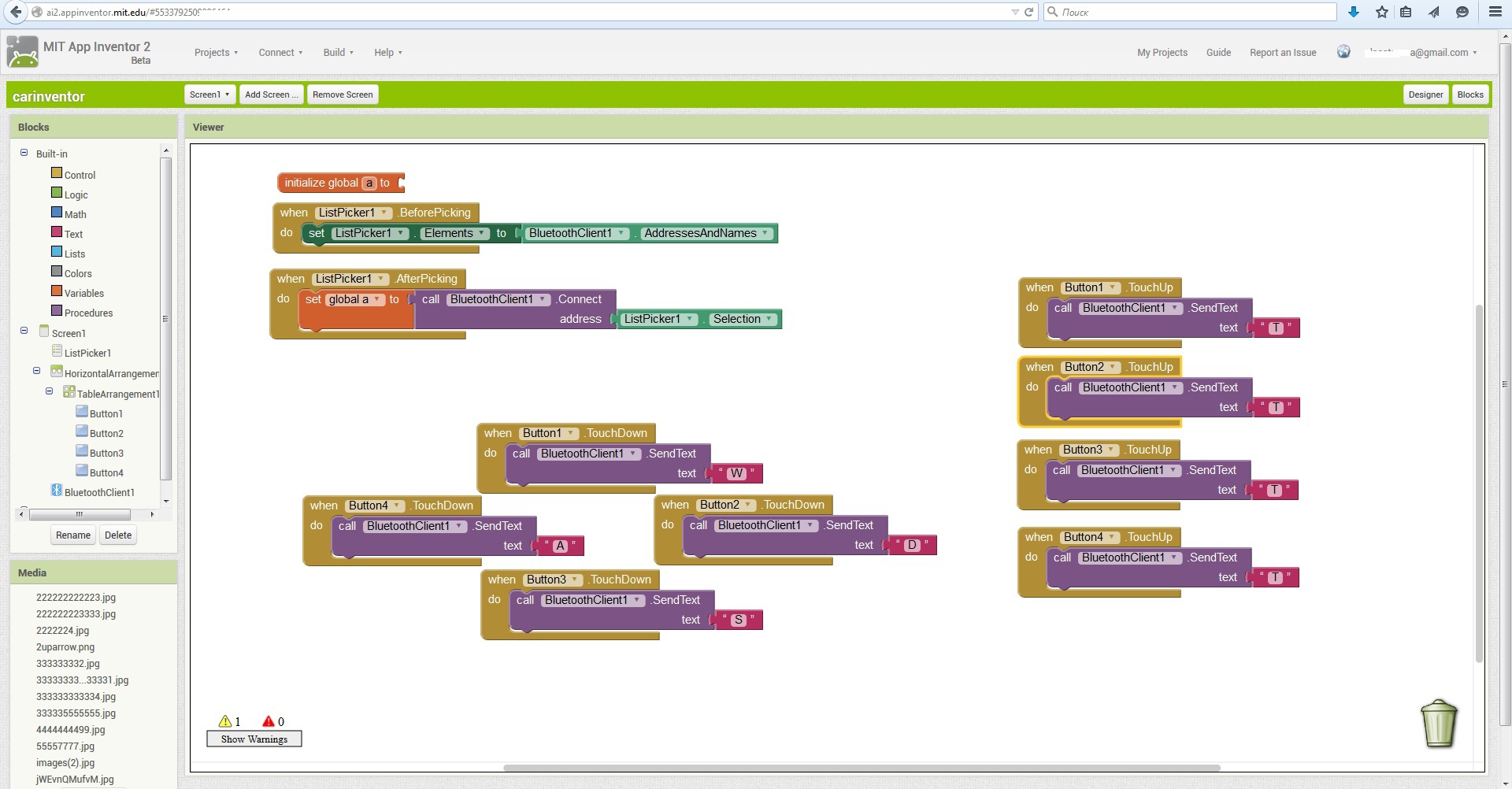
Далее нажимаем на кнопку «Blocks» в правом верхнем углу и все тем же методом перетаскивания элементов создаем логику работы нашего android-приложения примерно вот так:
Теперь остается скомпилировать приложение, нажав на кнопку «Build».
С написанием скетча я думаю у любителей ардуино проблем не возникнет, скажу лишь, что можно взять выбрать из готовых скетчей, где управление машинкой осуществляется с компьютера по sireal порту. Я использовал этот
скетч int val; int IN1 = 4; int IN2 = 7; int EN1 = 6; int EN2 = 5; void setup (){Serial.begin (9600); pinMode (IN1, OUTPUT); pinMode (IN2, OUTPUT); pinMode (EN1, OUTPUT); pinMode (EN2, OUTPUT);
}void loop (){if (Serial.available ()){val = Serial.read ();
// Задаём движение вперёдif (val == 'W') // При нажатии клавиши «W»{// Выводы конфигурируются согласно работе Motor Shield’а// Моторы крутятся впередdigitalWrite (EN1, HIGH); digitalWrite (EN2, HIGH); digitalWrite (IN1, HIGH); digitalWrite (IN2, HIGH);}
// Задаём движение назадif (val == 'S'){digitalWrite (EN1, HIGH); digitalWrite (EN2, HIGH); digitalWrite (IN1, LOW); digitalWrite (IN2, LOW);}
// Задаём движение вправоif (val == 'D'){digitalWrite (EN1, HIGH); digitalWrite (EN2, HIGH); digitalWrite (IN1, HIGH); digitalWrite (IN2, LOW);}
// Задаём движение влевоif (val == 'A'){digitalWrite (EN1, HIGH); digitalWrite (EN2, HIGH); digitalWrite (IN1, LOW); digitalWrite (IN2, HIGH);}
// Стоп режим// При отпускании клавиш в программе в порт шлется «T«if (val == 'T') // При нажатии клавиши «T»{// Выводы ENABLE притянуты к минусу, моторы не работаютdigitalWrite (EN1, LOW); digitalWrite (EN2, LOW);}}}
Итак, можно проверять, как машинка едет:[embedded content]
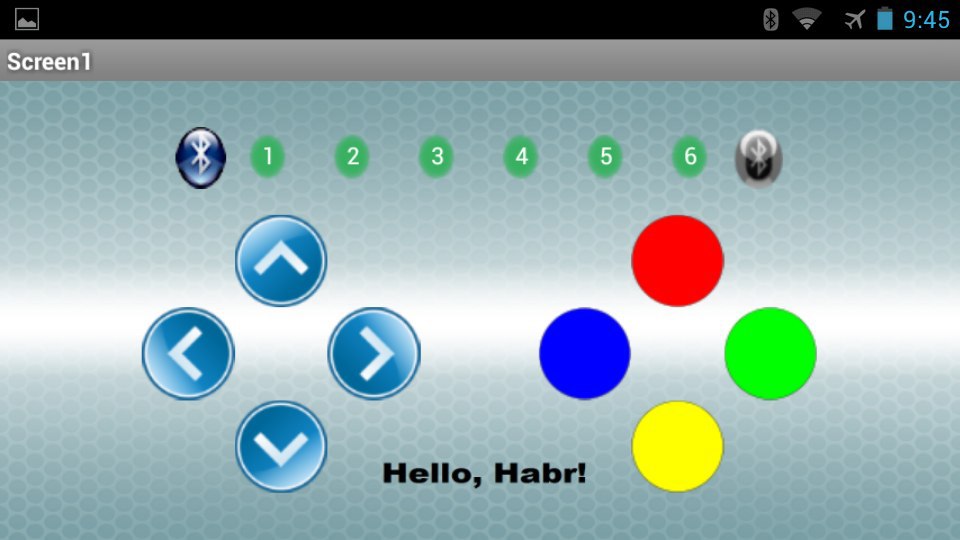
Те, кому нравится дизайн в приложениях, могут немного поменять. Подробно описывать как это делать не буду, там не сложно самому разобраться. Скажу лишь, что для этого в основном нужно использовать .png файлы, вместо .jpeg, которые не поддерживают прозрачный фон. Например, сделать такой дизайн за полчаса или час сможет любой неподготовленный человек:
P.S. Для тех, кому нравится учиться на видеоуроках, я снял ролик, который показывает все те же действия, которые описаны в данной статье. Вот он:
[embedded content]
