Робот-пылесос Samsung Powerbot SR20H9050U: мощный и умный
Впервые представителей семейства мощных роботов-пылесосов Powerbot компании Samsung мы увидели на выставке IFA еще в 2014 году. Роботы привлекали внимание своей необычной внешностью, высокой мощностью всасывания, которая ощущалась без всяких тестов, и тем, что как котики могли бегать за световым пятном. В 2015 году на той же выставке Samsung представила еще пару моделей Powerbot, уже с поддержкой управления по Wi-Fi из мобильного приложения. Однако на момент написания статьи в России Samsung предлагает только одну модель семейства, которую мы и протестировали.
Содержание:
Паспортные характеристики и комплект поставки
| Кинематическая система | Два ведущих колеса, два поворотных ролика, два фиксированных ролика |
| Способ сбора пыли | Активная щетка и вакуумная фильтрация |
| Пылесборник | Емкость 0,7 л |
| Основная щетка | Одна с ворсом, ширина 311 мм |
| Боковые щетки | Отсутствуют |
| Дополнительно | Резиновый скребок |
| Режимы очистки | Автоматический, локальный, максимальный, ручной, в заданное время однократно или ежедневно. Модификаторы: пониженная мощность и определение загрязнения |
| Эффективность очистки | Скорость перемещения 0,32 м/с |
| Уровень шума | 76 дБА |
| Датчики препятствий | Механический бампер, ИК-датчики препятствий и перепада высоты |
| Датчики ориентации | ИК-датчики поиска базы и определения виртуальных стен, потолочная видеокамера, предположительно гироскоп и акселерометр (всего 10 датчиков) |
| Управление на корпусе | Сенсорные кнопки |
| Дистанционное управление | ИК-пульт ДУ |
| Оповещение | Светодиодный дисплей и звуковые сигналы |
| Время автономной работы | Примерно 60 мин. |
| Время зарядки | Примерно 160 мин. |
| Способ зарядки | На зарядной базе с автоматическим возвратом |
| Батарея | Литий-ионная, 21,6 В, 84 Вт·ч |
| Потребляемая мощность | 70 Вт (видимо, во время работы) |
| Масса | 4,8 кг |
| Размеры (Ш×В×Г) | 378×135×362 мм |
| Особенности | Технология Cyclone Force, управление движением Point Cleaning, создание карты (система Visionary Mapping Plus) и выбор оптимального маршрута уборки, работа с маяками в режиме «виртуальная стена» |
| Комплект поставки* |
*Комплект поставки лучше уточнять перед покупкой. |
| Ссылка на сайт производителя | www.samsung.com/ru/ |
Внешний вид

Робот нам достался не новым, а слегка бывшим в употреблении. Особенно досталось коробке (предположительно, она была с пластиковой ручкой), из-за чего мы не приводим ее фотографию. В итоге мы получили возможность оценить изменение внешнего вида после какого-то срока эксплуатации. Ничего критичного, но, конечно, темные зеркально-гладкие пластиковые поверхности быстро покрываются хорошо заметными потертостями и царапинами. Внешне этот робот-пылесос очень отличается от привычных для этого класса устройств форм в виде круглых и не очень шайб-переростков. Прежде всего, он высокий, и его корпус в явном виде разделен на головную часть со щеткой и датчиками и «брюшко» с пылесборником, мотор-вентилятором и т. д.

Края корпуса сверху сглажены, а передний край снизу заметно скошен, что помогает роботу преодолевать препятствия. Сверху корпус робота имеет панели из плотно тонированного прозрачного пластика, под которыми разместились ИК-датчики и индикаторы. Также есть участки с матовым черным пластиком без покрытия. Выделяются обрамление потолочной камеры и корпус мотор-вентилятора, имеющие зеркально-гладкое металлизированное покрытие медного оттенка.

Корпус пылесборника изготовлен из тонированного прозрачного поликарбоната. Бока в основном из белого пластика с зеркально гладкой поверхностью, на которой мелкие повреждения заметны мало.

Днище — матовый черный пластик без покрытия. Скоба, ограждающая круговую направленную вверх видеокамеру, откидывается вверх и превращается в ручку, за которую робота удобно переносить.

Сверху ближе к задней части располагается контрольная панель с тремя сенсорными кнопками, имеющими крупные и контрастные значки, многосегментным светодиодным индикатором и подсвечивающимися значками режимов.

Сзади есть вставка из прозрачного тонированного пластика, скрывающая дополнительные ИК-приемники.

В передней части корпуса на высоте примерно 20—мм от пола установлен подпружиненный бампер из черного матового пластика, выполняющий роль механического датчика препятствий.

Перевернув робота вверх днищем, мы увидим две контактные площадки, два фиксированных ролика, отсек с щеткой, передний поворотный ролик, два ведущих колеса на подпружиненных рычагах, крышку отсека аккумулятора, красную кнопку выключения за защитным колпачком из упругого пластика и задний поворотный ролик на подпружиненной стойке.

Есть три ИК-датчика перепада высоты (окошки на днище близко к краю — спереди и перед ведущими колесами), благодаря которым пылесос не падает со ступенек. База, на которой робот заряжается, имеет относительно большие размеры, но оснащена внешним блоком питания, что неудобно.

Корпус базы изготовлен в основном из черного пластика с матовой поверхностью, а кожух спереди-сверху — из тонированного прозрачного для ИК-излучения пластика. Кожух скрывает, по всей видимости, ИК-маячки парковки и дистанции, а сверху через него просвечивают красный значок подачи питания и зеленый, указывающий на то, что робот состыкован с базой.

Провод выходит из базы сзади по центру, и его можно уложить в ложбинки на базе так, чтобы он выходил или справа, или слева. Это удобно. Но еще придется где-то размещать громоздкий блок питания.

На днище базы можно обнаружить четыре противоскользящие резиновые площадки-таблетки.

Пульт относительно небольшой, в руке лежит удобно. Обозначения кнопок, выполненных из упругого пластика, читаются хорошо. Корпус пульта изготовлен из черного маркого пластика с зеркально-гладкой поверхностью, но хотя бы под кнопками в передней части есть износостойкая матовая подкладка. К сожалению, пульт работает по ИК-каналу, поэтому для управления пылесосом он должен находиться в пределах прямой видимости и направлять пульт нужно примерно в сторону робота.

В передней части пульта, кроме типичного ИК-светодиода для передачи команд, есть два окна для световых указок.

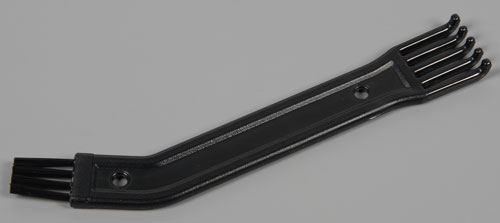
Из дополнительных аксессуаров и расходных материалов в комплект поставки вошли только одна-единственная виртуальная стена (без элементов питания), запасной предмоторный фильтр для пылесборника робота и кисточка-гребенка, которую предлагается использовать для очищения щетки, окошек ИК-датчиков и т. д.
Упакован пылесос и все к нему в не очень большую коробку, размерами 475 на 188 на 526 мм, и весит это все 8,0 кг (по данным производителя).
Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с русского сайта компании-производителя, и внимательно его изучить.
Кинематическая схема «классическая»: оси ведущих колес расположены примерно на одном диаметре условной, без учета прямоугольной передней части, окружности корпуса. Однако форма корпуса в плане подковообразная, что уже не позволяет устройству совершать разворот на месте без изменения границ, занимаемой площади. Поэтому при встрече с препятствием робот должен немного отъезжать назад, и только потом отворачивать. Также роботу определенно могут не понравится узкие места, в которых он не может развернуться — двигаться задним ходом на большое расстояние, роботу, видимо, не разрешается из-за отсутствия задних датчиков перепада высоты. Наши измерения дали близкие к паспортным массогабаритные величины. Напомним, что максимальная высота равна 135 мм, передняя часть с щеткой пониже, но все равно такая высота уменьшает доступную для уборки площадь. Под низкими диванами придется убирать по-старинке, шваброй/пылесосом, или можно купить второго низкого робота специально для таких мест.
Диаметр ведущих колес большой (примерно 105 мм), они имеют глубокий резиновый протектор, а вертикальное перемещение колес на подпружиненных рычагах подвески составляет примерно 27 мм, поэтому робот отличается неплохой проходимостью. Заявлено, что робот может преодолевать препятствия (пороги) высотой до 15 мм, но на самом деле проходимость даже чуть лучше, по нашим оценкам и пороги в 20 мм робот с большой вероятностью преодолеет.
При уборке основная щетка подхватывает мусор с пола, который засасывается потоком воздуха в отверстие за щеткой. Боковых щеток нет, но если присмотреться, то снизу спереди в углах можно увидеть специальные канавки-воздуховоды, благодаря которым хотя бы легкий мусор может извлекаться из углов и впритык к поверхностям.

В целом, благодаря высокой мощности всасывания и особенностям конструкции этот робот отчасти является пылесосом в классическом смысле, так как пыль частично засасывается непосредственно с очищаемой поверхности, да и перенос мусора в пылесборник выполняется именно с потоком воздуха, а не перекидывается щеткой. Воздух и грязь разделяются в основном циклонным способом — засасываемый воздух поступает снизу (1) в циклонную камеру, где в сильно закручивается по восходящей спирали (2), при этом мусор центробежной силой прижимается к стенкам камеры и через окно в верхней части выбрасывается в основную емкость пылесборника. Воздух далее поступает в центральную часть камеры (3) и проходит через предмоторный фильтр, где задерживается оставшаяся мелкая и легкая пыль, и уже потом воздух попадает в отсек вентилятора. Позаимствованная с сайта компании-производителя картинка это иллюстрирует:

Чтобы вынуть пылесборник, его нужно потянуть вверх за выступающую часть с надписью Pull. Он поворачивается в отсеке и вытаскивается вверх.

Входное отверстие у пылесборника небольшое и если специально не трясти, из него ничего не высыпается.

Поместив его на мусорным ведром/пакетом, нужно нажать на желтую кнопку фиксатора, вытащить циклонную камеру с фильтром и опустошить основную емкость. Затем отщелкнуть крышку фильтра от камеры, вытащить фильтр за желтое колечко и вытрясти мусор из всего этого. Как вариант очищать пылесборник можно и обычным пылесосом с щелевой насадкой. Фильтр трехслойный: фигуристый поролон, волокнистый слой и поддерживающая сеточка. Все это в обрамлении резинового кольца уплотнения. При необходимости фильтр нужно промыть, тщательно высушить и только после этого собирать пылесборник. А через какое-то время, из-за механического износа фильтра его придется заменить.

Корпус пылесборника выполнен из прозрачного слегка тонированного пластика, что позволяет визуально контролировать его наполнение, по крайней мере, пока его стенки не сильно загрязнены. Дополнительно периодически по мере необходимости нужно очищать главную щетку и удалять намотавшиеся на оси щетки и колес нитки/волосы, очищать окошки датчиков и т. д. Для выполнения этих процедур можно воспользоваться прилагаемой щеточкой-скребком. Очистку главной щетки удобнее выполнять, вынув ее из отсека. Отметим, что вращается она на двух подшипниках: на бронзовом скольжения со стороны привода и качения на противоположном торце, помещенного в резиновую виброизолирующую втулку.


По всей видимости, в самом пылесосе где-то на пути от щетки к пылесборнику поток воздуха с мусором просвечивается парой ИК-датчик/ИК-приемник, что позволяет пылесосу определять места с повышенной загрязненностью по уменьшению светопропускания.
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Эта модель имеет четыре основных режима уборки:
- Auto (Авто) — однократная уборка всей доступной площади.
- Spot (Область) — интенсивная очистка определенного места. В это место пылесос или просто переносится, или направляется в режиме ручного управления.
- Max (Максимум) — уборка всей доступной площади до тех пор, пока батарея почти не разрядится.
- Manual (Ручной) — ручное управление движением с помощью пульта ДУ.
Дополнительно доступны опции Silence (режим Тихий) — уменьшение мощности всасывания и заодно шума, а также режим с включенным датчиком загрязнения (режим Dust Sensor).
Автоматическое выполнение уборки обеспечивает запуск робота в назначенное время однократно или ежедневно, при этом можно выбирать режим Авто или Максимум. Согласно руководству робот умеет один раз возобновлять уборку после подзарядки, если одного заряда батареи не хватило на уборку всей доступной площади.
С пульта доступны команды поворот вправо-влево и движение вперед, при этом робот движется и убирает только при нажатой кнопке, а команды с пульта имеют приоритет перед датчиками препятствий и сигналами виртуальной стены. Есть и второй способ управлять движением робота с пульта — нажав на кнопку Point Cleaning, поместить красный световой указатель перед роботом (где-то в пределах 50 см от него), и если робот его «увидит», то он начнет к нему двигаться, при этом убирая. На самом деле видимый красный луч — это для пользователя, робот ориентируется по второму, инфракрасному, для наглядности совмещенным с красным. Согласно инструкции дальность работы такого указателя зависит от угла наклона и в лучшем случае (с высоты 1,5 м) равна 3 м. Отметим, что кнопкой Sound на пульте можно отключить и включить обратно звуковые сигналы от робота.
Пространственное планирование уборки обеспечивается с помощью устройства — виртуальной стены (Virtual guard), работающей от двух элементов питания типа D20 (LR20, «большой бочонок»).

В направлении от виртуальной стены создается невидимая человеку преграда, которую пылесос не пересекает. Направление этого барьера обозначено стрелкой на корпусе, а длина, согласно инструкции, составляет не менее 2,5 м. С помощью этой виртуальной стены можно отгородить места, где выполнять уборку нежелательно. Включается и выключается устройство вручную кнопкой сверху.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье.
| Режим | Время уборки*, мин: сек | Доля убранного мусора, %% |
| Auto | 6:33 | 80,2 |
| Auto+Silence | ?:?? | 76,4 |
| Auto+Dust Sensor | 14:20 | 83,9 |
| Auto+Dust Sensor | 15:07 | 85,4 |
| Auto+Dust Sensor | 14:27 | 83,8 |
| Auto+Dust Sensor+Silence | 12:24 | 79,3 |
| Max (до разряда АКБ) + Dust Sensor | 51:11 | 94,4 |
В режиме Auto территорию уборки робот проходит змейкой с минимальным перекрытием и по возможности наиболее рациональным, с его точки зрения, способом, после чего возвращается на базу. Видео ниже снято сверху с одной точки, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз. Режим уборки — Auto с выключенными опциями Silence и Dust Sensor:
Движение метки на корпусе робота также позволяет отследить, как робот перемещается (в данном случае, из препятствий был оставлен только загончик, границы помещения при свете видны на ролике выше):
Если включить режим обнаружения загрязнений (Dust Sensor), то, почувствовав мусор, робот увеличивает мощность всасывания, совершает на этом месте два немного расширяющихся в диаметре оборота, а затем продолжает прерванное движение змейкой. При этом времени на уборку требуется заметно больше, но и качество чуть увеличивается:
В тихом режиме (Silence) мощность всасывания и шум немного уменьшаются, но при включенном Dust Sensor на грязных местах мощность все равно увеличивается:
В режиме Max (до разряда АКБ) выполняется та же процедура, обход змейкой, но, если площадь уже один раз убрана, то повторные проходы выполняются уже с некоторым перекрытием, случайно или намеренно, что повышает качество уборки. В этом режиме, если включен модификатор Dust Sensor, то робот только увеличивает мощность всасывания на грязных участках, но уже не крутится, что, может быть, даже лучше.
Робот определенно строит и использует карту, это видно по маршруту движения — он заполняет змейкой всю доступную площадь, при этом по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить. Кстати, полная темнота не является для робота помехой, видимо, камера, направленная в потолок, выполняет вспомогательную функцию, и без ее данных робот вполне может обойтись, используя другие навигационные датчики, предположительно гироскоп и акселерометр. При боковом контакте с препятствием пылесос обычно совершает маневр объезда по дуге, стараясь держаться к препятствию как можно ближе. При обнаружении препятствия спереди робот разворачивается и начинает новое колено змейки. Физический контакт с препятствием чаще происходит (срабатывает механический бампер спереди), но иногда робот определяет наличие препятствий с помощью ИК-датчиков. Например робот умеет двигаться вдоль стен на расстоянии примерно 25 мм. Робот очень не любит забираться в узкие места, так даже при увеличении ширины загончика до 50 см (при ширине робота в 38 см) пылесос очень редко в него заезжал, да и то, заезжая редко добирался до конца тупичка. Судя по типу собранного мусора (разумеется, у нас на полу тестового участка всегда присутствует небольшое количество обычного мусора — песок, волокна, волосы и т. д., да и ворс из ковролина немножко лезет) мощность всасывания у данного пылесоса высокая, гораздо выше, чем у всех побывавших у нас на тестировании роботов. Тем не менее процент уборки не очень высокий. Причин тому несколько. Во-первых, у робота нет боковых щеточек, а наш тестовый мусор в виде риса не так-то и легко собрать только воздушным потоком по боковым каналам. Поэтому вдоль препятствий немного мусора остается, даже после многократного прохождения:

В случае однократной уборки в режиме Auto немного мусора остается и по площади. Вызвано это тем, что пол у нас немного неровный, а щетка у пылесоса длинная, жесткая и с относительно короткой щетиной, поэтому в местах локального понижения часть мусора может оставаться. Но хотя бы после нескольких проходов тестовый мусор остается практически исключительно впритык к стенкам:

С базой робот обращается не очень аккуратно, может ее слегка толкнуть и чуть сдвинуть с места, но все равно, такого, чтобы робот ее сдвинул так, чтобы не смог на нее заехать, в наших тестах не случалось.
Дополнительно были проведены тесты с использованием виртуальной стены. Стена работает, и длина преграды составляет не менее 3 м даже на не очень свежих элементах питания:
В режиме локальной уборки робот убирает спиралью с прямыми углами, так как это демонстрирует видео ниже:
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом отсеке был выгорожен участок из трех помещений, обозначенных на схеме как А (28,4 м² — «прихожая»), Б (23,3 м² — «коридор») и В (18,5 м² — «комната»). База установлена в помещении А (мебель и прочее — столы, кресла, аквариум и т. д. на схеме не показаны):
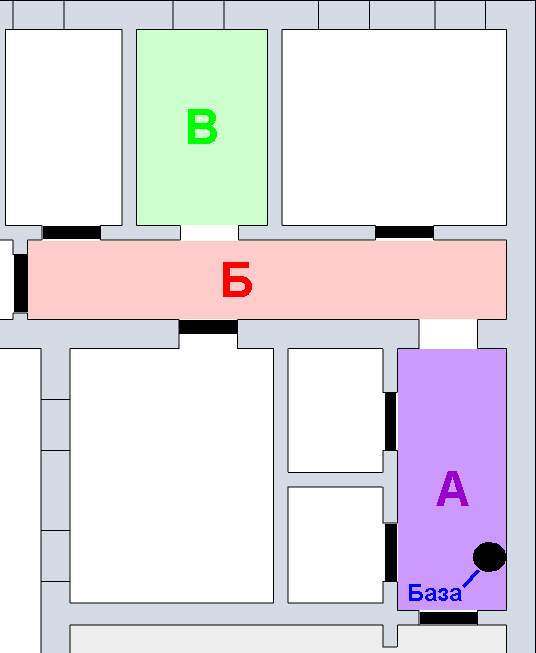
При запуске с базы в общей сложности робот убирал почти 30 минут. Итого с учетом возможности однократного возобновления уборки, этот робот самостоятельно может справится с уборкой помещения площадью где-то до 230 м². Пропусков в явном виде мы не заметили, робот однократно проходил змейкой, и дополнительно заглядывал туда, где не отмечал столкновения (механического или бесконтактного) с препятствиями. Среди ножек офисных стульев и кресел робот не застрял. Посмотрим, что и как он собрал:

Тяжелый мусор (песок) ожидаемо собрался в основном отсеке пылесборника и легко из него выпал. Много легкого мусора налипло около циклонной камеры, а часть волос скрутилась в гнездо на выпускной решетке циклона. Мелкая пыль задержалась предмоторным фильтром, ее количество свидетельствует, что эффективность циклонной камеры не очень высокая:

Волосы на щетку плотно намотались по всей ее длине и на торцах тоже:

Отметим, что волосы с валика щетки лучше срезать с помощью какого-нибудь инструмента (портновский вспарыватель подойдет), так как просто пальцами они подцепляются с трудом.
Уровень шума мы измеряли в трех режимах:
| Режим | Уровень шума, дБА |
| Обычный | 66 |
| Обычный, срабатывание датчика грязи | 70 |
| Тихий | 60 |
Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 78 дБА. Даже в «тихом» режиме робот относительно громкий, да и сам звук особо приятным не назовешь. Характер шума можно также оценить по ролику ниже, там же показано управление световым пятном и некоторые другие моменты:
При зарядке пылесоса на базе потребление от электросети доходит до 71 Вт в начале процесса, к концу снижаясь до 10 Вт. Если пылесос включен и находится на базе, то от сети потребляется 8–8,5 Вт, что для режима фактического бездействия относительно много. Если пылесос убрать с базы (или выключить его кнопкой на днище), то потребление упадет до 2 Вт — столько потребляет сама база, включенная в сеть. На полную зарядку аккумулятора пылесоса требуется примерно 135 минут. Аккумулятор без проблем может заменить пользователь самостоятельно, воспользовавшись обычной крестовой отверткой среднего размера:

Масса батареи равно 666 г. За ценами, особенно рублевыми, сейчас не уследишь, но на момент написания статьи в одном сетевом магазине на Samsung Powerbot SR20H9050U была установлена цена в 54 990 рублей.
Выводы
Робот-пылесос Samsung Powerbot SR20H9050U относится к классу роботов с продвинутой системой ориентации: он строит карту помещения и умеет прокладывать рациональный маршрут движения с минимальным повторным перекрытием траектории уборки. Данный робот отличает очень высокая для этого класса техники мощность всасывания и применение циклонного фильтра. Робот, правда, получился относительно большим по габаритам и шумным, но не всегда эти моменты будут существенными недостатками.
Достоинства:
- Высокая мощность всасывания
- Прокладка рационального маршрута
- Поддержка виртуальных стен
- Однократная/ежедневная уборка в заданное время
- Однократное возобновление уборки после подзарядки
- Световая указка
- Отключаемое звуковое оповещение
- Необычный дизайн
Недостатки:
- Относительно большая высота корпуса
- Не самое высокое качество уборки впритык к препятствиям
- База с большим внешним блоком питания
Samsung Powerbot SR20H9050U награду за оригинальный дизайн.

Полный текст статьи читайте на iXBT
