Робот-пылесос iBoto Smart C820W Aqua: сухая уборка любых полов и влажная протирка полов с гладким покрытием, навигация с построением карты
Паспортные технические характеристики, комплект поставки и цена
| Кинематическая система | два ведущих колеса и опорный поворотный ролик |
|---|---|
| Способ сбора пыли | инерционное перемещение и вакуумная фильтрация |
| Пылесборник | одно отделение, емкость 0,45 л |
| Основная щетка | одна: ворс + резиновые скребки |
| Боковые щетки | две |
| Дополнительно | резиновый скребок |
| Режимы очистки | автоматический (запуск вручную или по расписанию), вдоль препятствий, локальный, ручной, влажная протирка пола (емкость для воды 350 мл) |
| Уровень шума | 54 дБ |
| Датчики препятствий | механический передний/боковой бампер, ИК-датчики приближения и перепада высоты |
| Датчики ориентации | верхняя видеокамера, ИК-датчики поиска базы, датчики вращения ведущих колес |
| Управление на корпусе | две механические кнопки |
| Дистанционное управление | ИК-пульт ДУ, приложение для мобильного устройства |
| Оповещение | светодиодные индикаторы, звуковые сигналы и голосовое оповещение, с помощью мобильного приложения |
| Время автономной работы | 120—200 минут (максимальная площадь 200 м²) |
| Время зарядки | около 180—240 минут |
| Способ зарядки | на зарядной базе с автоматическим возвратом или напрямую от блока питания |
| Источник питания | литий-ионный аккумулятор, 14,8 В, 2600 мА·ч, 38,48 Вт·ч |
| Масса | 2,5 кг |
| Размеры (диаметр×высота) | ∅330×76 мм |
| Комплект поставки |
|
| Ссылка на сайт производителя | iBoto Smart C820W Aqua |
| Где купить | Фирменный магазин iBoto |
| Розничные предложения |
Внешний вид и функционирование
Робот-пылесос упакован в две коробки — внешнюю защитную из толстого гофрокартона скромно оформленную, и внутреннюю с ярким оформлением из картона потоньше и уже с ручкой. При необходимости ручку от внутренней коробки можно втащить наружу, чуть надрезав внешнюю коробку.


Для защиты и распределения содержимого внутренней коробки используются картонные вкладки и перегородки, а также полиэтиленовые пакеты. В комплект поставки входят почти все необходимые для работы аксессуары, почти, так как пару элементов питания типа AAA для пульта пользователю придется покупать отдельно. Впрочем, пульт вообще можно не использовать, если управлять роботом с помощью мобильного приложения или просто кнопками на корпусе.

Запасные части и расходные материалы в комплекте поставки представлены сменным складчатым фильтром последней ступени, парой салфеток из микроволокна и вторым комплектом боковых щеток. Есть и комбинированный инструмент для очистки основной щетки, пылесборника и т. д. Руководство пользователя представляет собой книжку с текстом на русском языке. Качество текста и полиграфического исполнения достаточно высокое.
Корпус робота изготовлен из пластика. Верхняя часть корпуса, бампер и днище — черный пластик без покрытия и преимущественно с матовой поверхностью. Верхняя панель ламинирована прозрачной пленкой, относительно устойчивой к царапинам. Пленка прикрывает геометрических узор из плавных серых линий.

Преимущественно темный цвет корпуса осложняет поиск робота в темных закоулках квартиры, когда он по какой-то причине не вернется на базу, также робота сложнее заметить боковым зрением, когда он путается под ногами, а значит, с большей вероятностью на него можно наступить. На верхней панели ближе к передней части есть две механические кнопки. Со значком домика — возврат на базу, с значком питания — включение/выключение робота, запуск/остановка уборки, включение режима подключения к Wi-Fi. Цветная подсветка значков на кнопках указывает на текущее состояние робота. Между кнопками есть индикатор состояния подключения к Wi-Fi. Яркость индикаторов достаточно высокая, чтобы рассмотреть их в освещенном помещении.

Дополнительно о своем состоянии робот информирует с помощью голосового оповещения, проговаривая фразы на русском языке, и в редких случаях робот издает тональные звуковые сигналы. Громкость голосового оповещения не регулируется, но его можно отключить в мобильном приложении.
Примерно в центре на верхней панели есть углубление, в котором располагается видеокамера, направленная вперед и вверх. Объектив камеры прикрыт кружком из минерального стекла. Эта камера служит одним из датчиков ориентации и распознавания помещения.

Пылесос имеет почти идеально круглую форму (ширина 340 мм, длина 338 мм — здесь и далее по тексту приведены результаты наших измерений). Масса робота равна 2,65 кг.

Края снизу скошены, что помогает роботу преодолевать препятствия, а выраженный бортик сверху снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом. На левом боку за бампером находится решетка громкоговорителя.

На правом боку находятся разъем питания для прямой зарядки аккумулятора и клавиша, отключающая батарею от основных цепей робота.

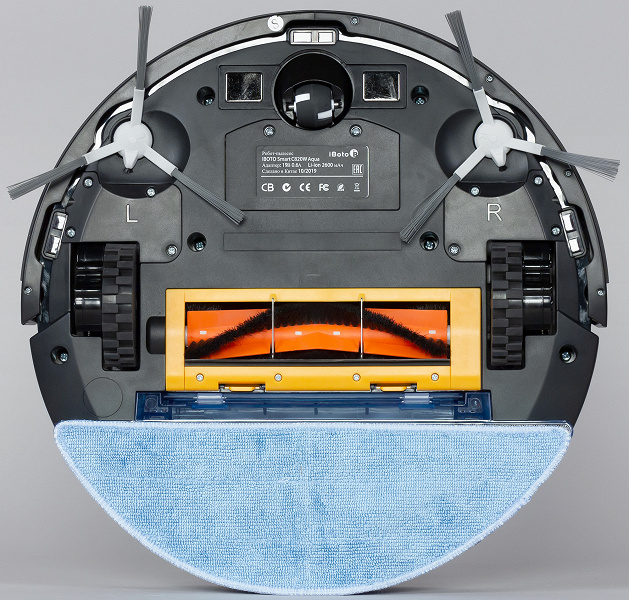
На днище расположены две контактные площадки, передний опорный поворотный ролик, боковые щеточки, крышка батарейного отсека, два ведущих колеса, отсек основной щетки. Ближе к краю сразу за бампером расположены три ИК-датчика перепада высоты, благодаря которым робот-пылесос может избежать падения со ступенек.

Оси ведущих колес расположены на одном диаметре окружности корпуса, это позволяет роботу совершать разворот на месте без изменения границ, занимаемой им площади. Положительную роль играют относительно небольшая высота робота, равная 76,5 мм, и гладкий по периметру корпус. Ведущие колеса диаметром 70 мм оснащены резиновыми покрышками с довольно глубокими грунтозацепами. Колеса установлены на подпружиненных рычагах, имеющих ход в 32 мм, что также улучшает способность робота преодолевать препятствия. Всю переднюю половину корпуса, заходя на бока, огибает подпружиненный бампер с небольшим ходом.

Сдвиг бампера вызывает срабатывание датчиков препятствий. Расстояние от пола до нижней точки бампера равно 16 мм, значит, на ступеньку такой высоты робот потенциально может заехать. Для защиты мебели спереди на бампер в нижней его части наклеена полоса из резины средней жесткости. Выше на бампере за окошком из тонированного пластика находятся ИК-датчики обнаружения препятствий, базовой станции и, возможно, приемник команд с пульта ДУ. Возможно ИК-приемник также расположен на верхней панели в блоке с кнопками.
Корпус пылесборника выполнен из прозрачного пластика, но тонированного и матированного, что не позволяет оценить степень заполнения пылесборника, не извлекая его из робота.

Нажав на фиксатор сзади, можно отсоединить пылесборник от корпуса робота. Входное отверстие расположено на достаточной высоте, чтобы при аккуратных манипуляциях с закрытым пылесборником мусор не выпадал. Передняя часть пылесборника откидывается на большой угол, что позволяет вытряхнуть скопившийся мусор или почистить пылесборник обычным пылесосом с щелевой насадкой. Для полной очистки нужно открыть верхнюю крышку, вынуть рамку с предварительным сетчатым фильтром, стряхнуть с него легкий мусор, и при необходимости извлечь из рамки и почистить складчатый фильтр тонкой очистки.

Фильтры также удобно чистить с помощью обычного пылесоса с щелевой насадкой. Отметим, что в пылесборнике установлен вентилятор, поэтому сам пылесборник недопустимо мыть под водой как и складчатый фильтр тонкой очистки. Сеточку можно промывать водой, главное до установки на место ее хорошо высушить. Упругие уплотнения на верхней крышке пылесборника, на рамке с фильтрами и на выходе отсека основной щетки (но уплотнения почему-то нет на передней откидывающейся части пылесборника) снижают паразитный подсос воздуха мимо фильтров и пылесборника. Металлическая сеточка на входе отсека вентилятора не дает попасть посторонним предметам в вентилятор и заклинить его. Поролоновая вкладка за выдувной решеткой рассекает поток воздуха и несколько снижает шум.
Боковые щеточки имеют длинную пластиковую относительно жесткую щетину, пучки которой выходят из упругих поводков. Как показала практика, эта щетина хорошо сохраняет форму. Правая и левая щеточки отличаются поворотом поводков, а чтобы пользователь знал, какую куда устанавливать, на щеточках и на днище есть рельефные буквы L и R. К осям приводов щеточки крепятся с помощью пружинного фиксатора, что очень удобно.

Вал основной щетки относительно большого диаметра — это облегчает освобождение вала просто пальцами без помощи инструментов от ниток, волос и прочего намотавшегося. Щетина на этой щетке имеет среднюю жесткость, а резиновые лопасти-скребки упругие и не очень тонкие. Пучки щетины и лопасти идут волнами, что уменьшает звук от вращения щетки в контакте с полом. Стальная ось в торце щетки вращается в шариковом подшипнике, вставленном в резиновую втулку, которая по замыслу разработчиков должна снижать шум и вибрации. Щетка в узле фиксируется рамкой из желтого пластика. На этой рамке есть резиновый скребок, который помогает щетке подхватывать мусор с пола и забрасывать его в пылесборник. Две проволочные перемычки на рамке снижают вероятность того, что робот будет наматывать на щетку уголки ковриков или что-то подобное.
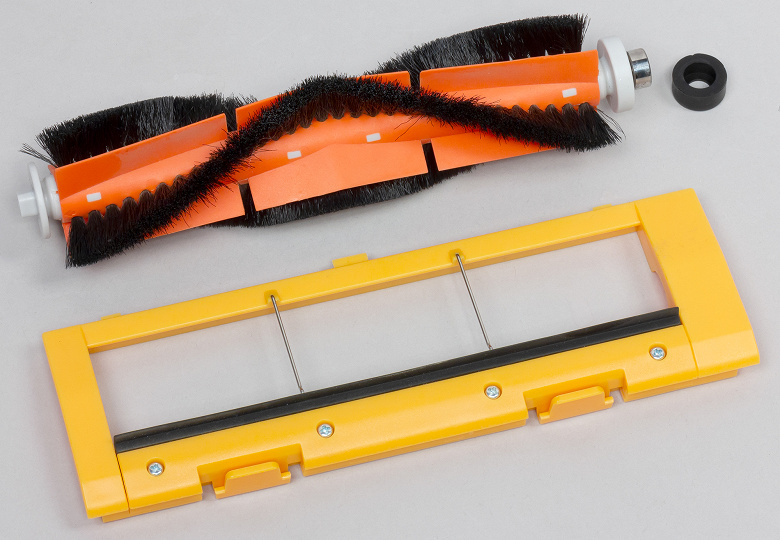
Отметим, что редукторы приводов щеток и колес позволяют их проворачивать рукой, это очень помогает, когда нужно вытащить робота, например, из-под дивана, под которым он застрял, или распутать что-то намотавшееся на колеса или щеточки.
При уборке передние боковые щеточки подгребают мусор к центру, затем основная щетка подхватывает мусор с пола и отчасти закидывает его пылесборник непосредственно, отчасти мусор в пылесборник попадает с потоком воздуха.
Для влажной очистки гладких полов вместо обычного пылесборника нужно установить входящий в комплект поставки специальный блок с баком для воды.
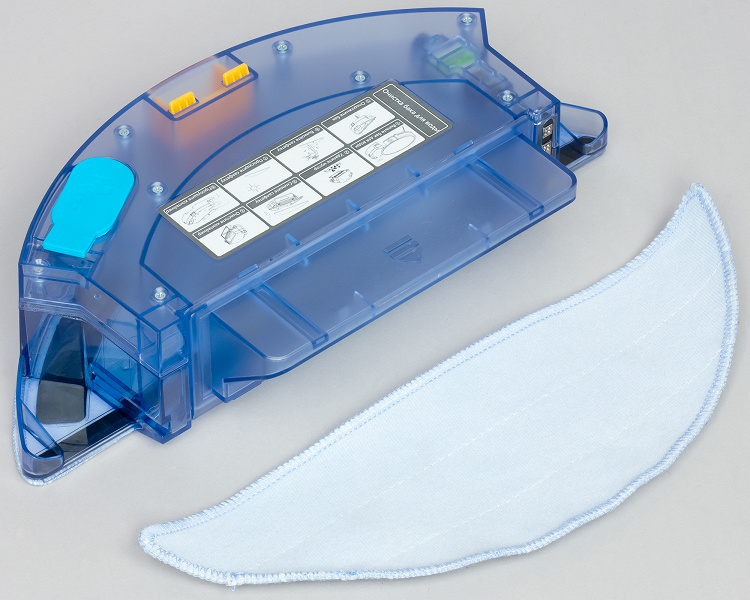
На дно блока на липучке прикрепляется махровая салфетка из микроволокна.
Салфетку можно предварительно увлажнить, а для поддержания ее во влажном состоянии, в бак нужно залить воду. Жидкость на салфетку просачивается через отверстия в днище резервуара. В процессе уборки нужно следить за уровнем воды, чтобы при необходимости долить воду в бак. Миниатюрный электрический насос, установленный в блоке, дозирует поступление воздуха в объем бака, что в свою очередь контролирует скорость вытекания воды. В режиме влажной уборки основная и боковые щеточки вращаются, поэтому немного мусора забрасывается в относительно большой отсек в передней части блока для влажной уборки. Перед зарядкой робота блок для влажной уборки нужно снять. Экспериментально определенный объем емкости для воды равен 385 мл.
В данном роботе установлена литий-ионная аккумуляторная батарея. Батарейный блок составлен из четырех цилиндрических элементов популярного типоразмера 18650.

База, на которой пылесос заряжается, имеет относительно большое основание, на которое снизу наклеено четыре противоскользящие ребристые накладки из резины.

Питается база от внешнего адаптера питания. Длина кабеля от адаптера равна 1,5 м.

К пылесосу прилагается небольшой ИК-пульт дистанционного управления. Кнопки пульта изготовлены из упругого резиноподобного материала, обозначения на кнопках достаточно крупные и контрастные.

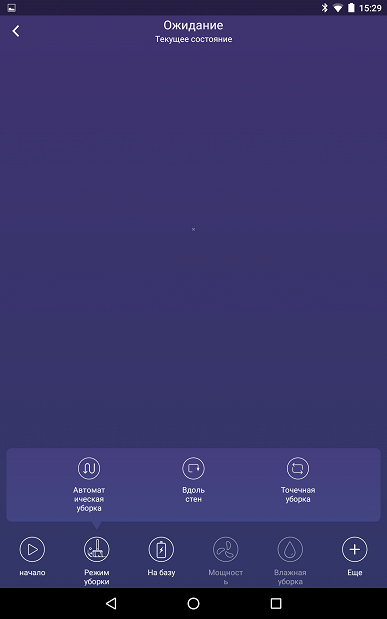
Данный робот-пылесос имеет четыре режима уборки:
В ручном режиме уборки направление движения робота задается с помощью кнопок пульта дистанционного управления или виртуальных в приложении. Робот поворачивает на месте при нажатии на стрелки вправо-влево на пульте, движется вперед, пока нажата стрелка вверх, и назад — пока нажата на стрелка вниз. В любом случае во время движения робот убирает.
В автоматическом режиме робот будет убирать или пока не уберет всю доступную площадь, или до снижения заряда батареи до критического уровня (до 20% — определено экспериментально). В обоих случаях при запуске с базы робот возвращается на базу для зарядки аккумулятора. В приложении можно включить режим продолжения уборки после дозарядки, если робот не успел убрать везде.
Для интенсивной очистки определенного места нужно перенести туда робота или направить его в нужное место в режиме ручного управления, а затем нажать на кнопку с надписью «Точечная уборка» в приложении или на кнопку со значком прицела на пульте. Робот начнет уборку на высокой мощности вентилятора по разворачивающейся и потом сворачивающейся спирали в круге диаметром чуть больше 1 м.
Еще одним вариантом уборки является движение только вдоль стен и препятствий (на высокой мощности вентилятора). Включается этот режим также с помощью пульта или приложения.
Во время сухой уборки в автоматическом режиме с помощью пульта или приложения можно изменять мощность всасывающего вентилятора робота (три ступени регулировки).
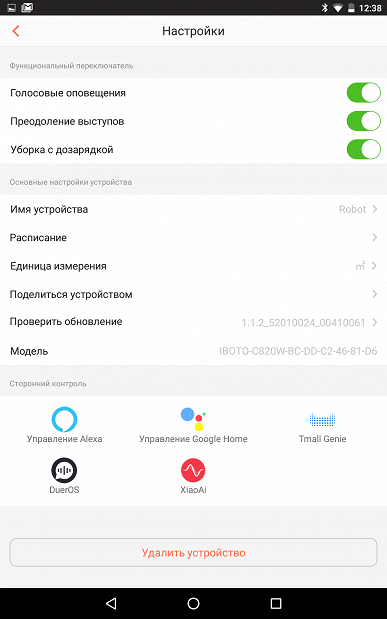
Приложение WeBack, устанавливаемое на мобильные устройства с Android (видимо, и iOS) на борту, расширяет функциональность робота. Запустив приложение первый раз, нужно установить связь с роботом, который должен быть в радиусе действия Wi-Fi-сети (поддерживается только 2,4 ГГц). Для управления роботом используется глобальный облачный сервис (необходима регистрация), поэтому доступ к роботу можно получить из любого места, где есть Сеть. Приложению зачем-то нужно разрешение на определение местоположения и на устройстве без спутниковой системы геопозиционирования это приложение вообще не работает. С помощью приложения робот запускается на уборку, уборка приостанавливается или принудительно завершается, выбираются режимы уборки, меняется мощность вентилятора, также робот по команде пользователя отправляется на базу, а функция «разместить» поможет найти робота — робот отзовется тональным звуковым сигналом. Присутствует функция ручного управления роботом. Кроме того, в приложении можно задавать расписание уборки (по дням недели), включать/выключать голосовое оповещение, режим преодоления порогов, уборку с дозарядкой и т. д.
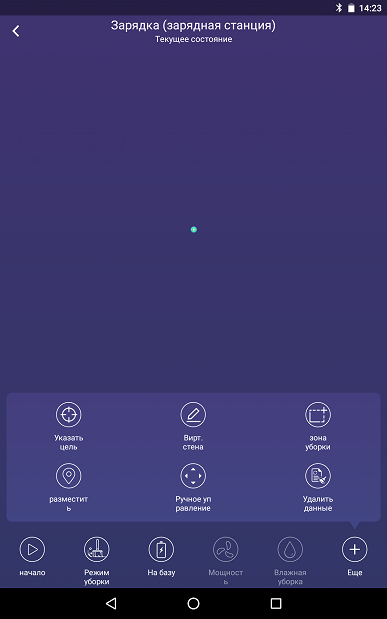
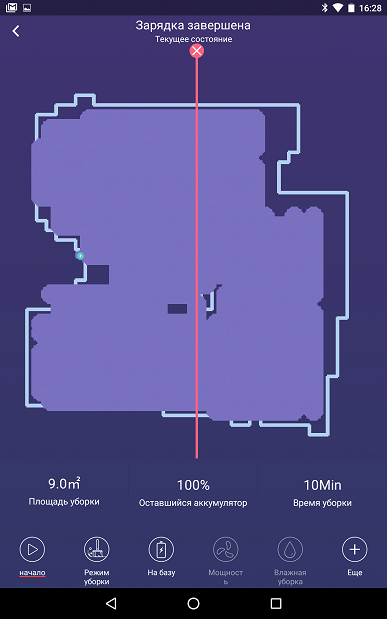
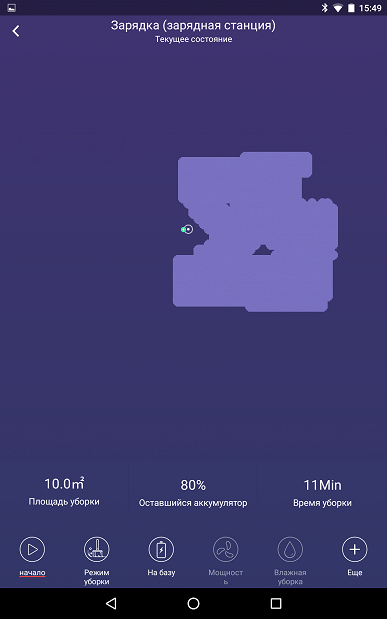
Во время уборки в окне приложения отображаются площадь, убранная роботом, уровень заряда аккумулятора, время и уборки, и, самое полезное, карта, построенная роботом, что, например, позволяет контролировать его поведение. Одним контролем польза от карты не ограничивается: робота можно отправить в определенное место, указанное на карте, можно установить на карте виртуальные стены, которые роботу запрещено пересекать, и, наоборот, указать участок, который нужно убрать (только один, и робот сразу едет там убирать).
Виртуальная стена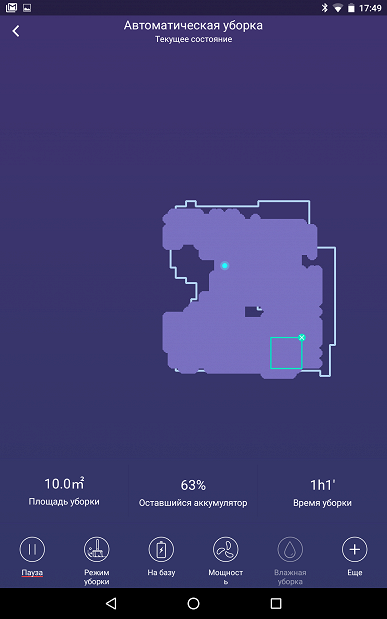
Зона уборки
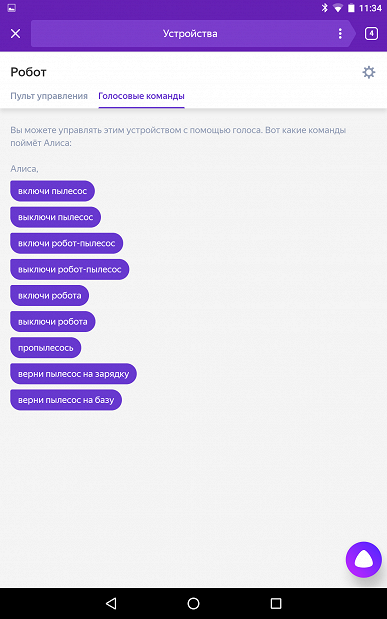
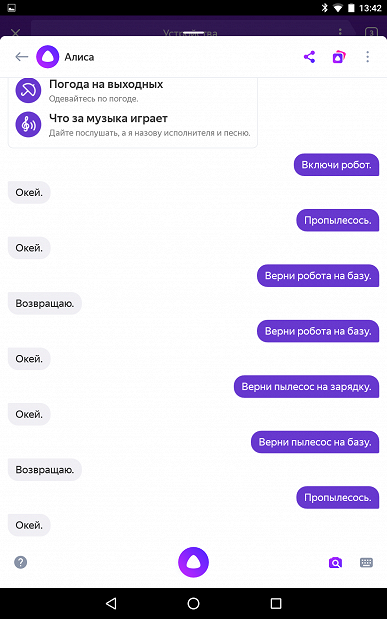
Есть поддержка голосового управления с помощью помощника Алисы Яндекса. Робот распознает две команды: начать уборку и возвратиться на базу.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье. Последовательные запуски на уборку:
| Время уборки, ММ: СС | % (суммарный) |
|---|---|
| 11:28 | 85,7 |
| 11:02 | 95,0 |
| 11:14 | 96,9 |
Видео ниже снято с одной точки с почти полным охватом убираемой территории, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз, первый запуск на уборку:
Уже после первого цикла уборки собрано много тестового мусора:
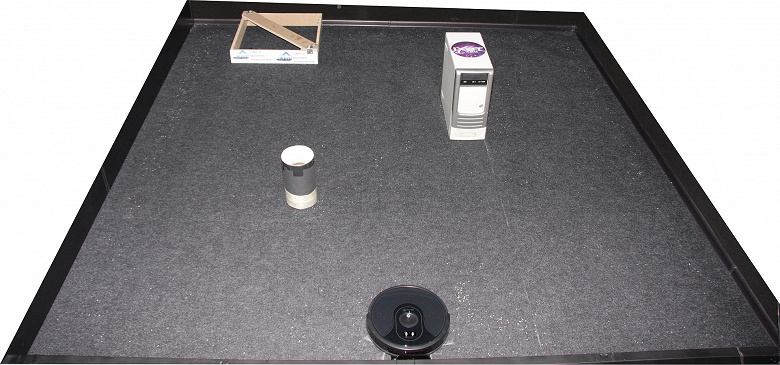
Очень похоже на то, что при этом пылесборник переполнился, и рис начал высыпаться обратно на пол. После третьего цикла тестового мусора на полу осталось очень мало:
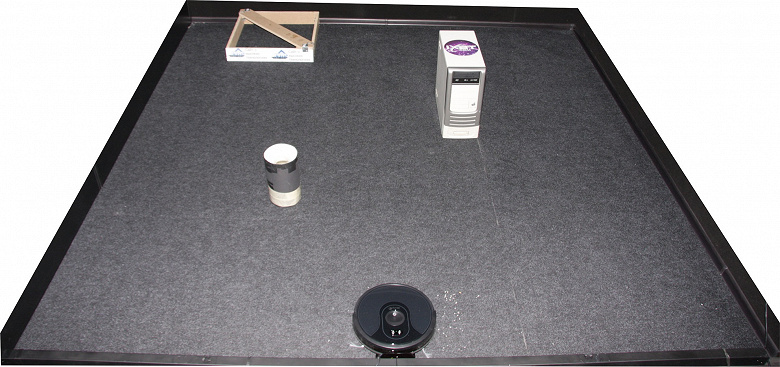
Немного в узком загончике, только в одном углу больше, чем одна рисинка, около базы мусора чуть больше:


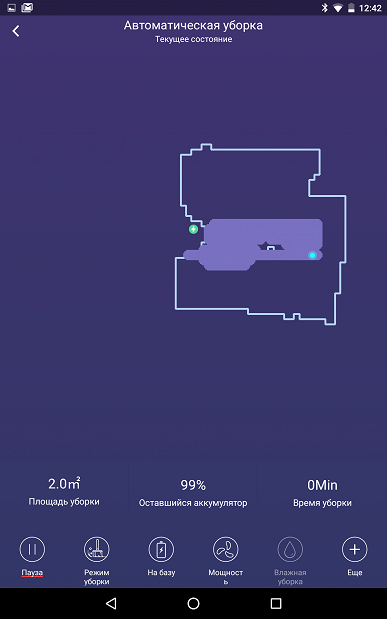
В случае нашего тестового участка в начале уборки робот, двигаясь змейкой, проходит доступную ему часть территории, и возвращается к тем местам, которые он еще не убрал, а затем обходит помещение по периметру. После первого цикла уборки в новом помещении робот только закрашивает убранные места, но карту препятствий не рисует (снимок слева). При повторном запуске в том же помещении через некоторое время после начала уборки робот «вспоминает» сохраненную карту и рисует контуры препятствий (снимок справа). Видно, что детализация карты не очень высокая. Запоминается, по всей видимости, только одна карта.
Точность навигации также средняя. В ходе уборки ориентация робота немного сбивается, но на основании данных с камеры и о фактическом положении препятствий робот подстраивает свое положение под запомненную карту. В результате такой подстройки робот может случайно оказаться за нарисованной пользователем виртуальной стеной и начать убирать там, где наоборот не должен (и в итоге не вернуться на базу, если она окажется за стеной). Однако в целом функции, связанные с навигацией, в частности уборка в заданном месте и перемещение в указанную точку, работают неплохо. В полной темноте робот убирать может, но его навигация работает существенно хуже.
В режиме влажной уборки робот убирал помещение площадью 30 м² (мебели относительно много) с линолеумом на полу в течение 28 минут, после чего вернулся в то место, откуда его запустили. Построенная карта убранной площади (запуск первый, поэтому контуры препятствий не нарисованы):
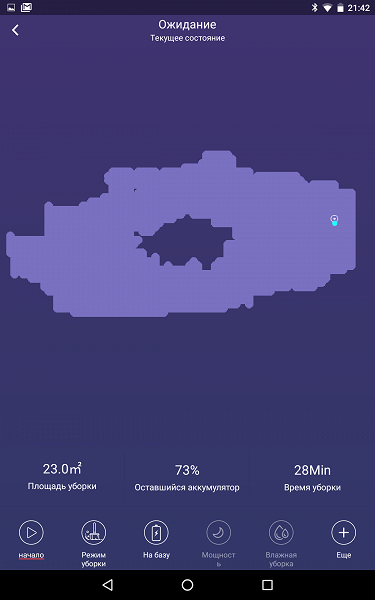
След был умеренно влажным общей шириной примерно со всю салфетку. Израсходовано было 186 мл воды. Так выглядит салфетка после уборки:

Немного мусора робот набросал в сухой отсек блока для влажной уборки:

Отметим, что, с нашей точки зрения, в таком режиме стоит убирать очень гладкие полы с маскирующим разводы рисунком, также перед влажной уборкой этим роботом полы нужно хорошо очистить от мусора (тем же роботом, например).
В режиме локальной уборки робот убирает по разворачивающейся и потом сворачивающейся спирали. включив режим высокой мощности вентилятора. Видео ниже это демонстрирует:
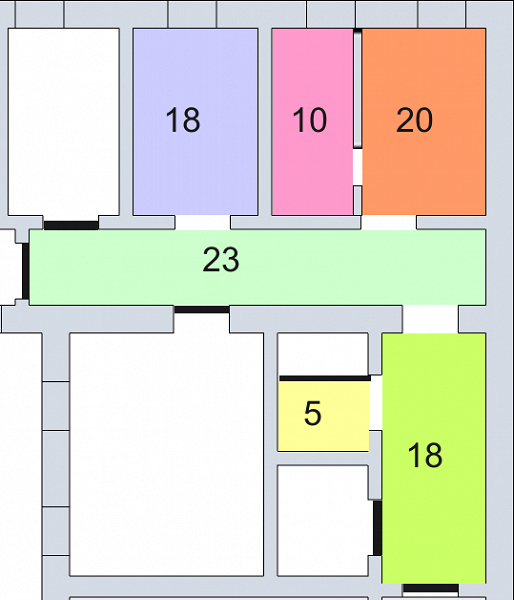
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом помещении был выгорожен участок из нескольких комнат общей площадью примерно 94 м². В коридоре (23 м²) только шкаф в торце, в других помещениях заполнение мебелью среднее, людей нет. Схема помещения приведена ниже. На ней цветными прямоугольниками отмечены доступные роботу комнаты. База робота установлена на схеме внизу справа:
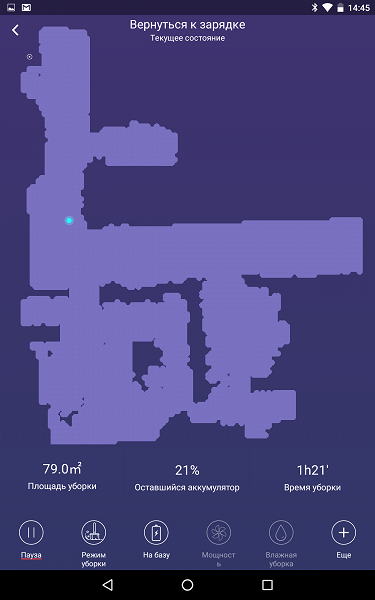
Робот работал на максимальной мощности всасывания в течение 82 минут, после чего посчитал, что уборку он закончил и по оптимальной траектории вернулся на базу. При моментальном повторном запуске робот проработал менее минуты, сообщил о слишком низком уровне заряда (20%), и быстро вернулся на базу. В целом построенная карта очень похожа на схему выше, значит серьезных сбоев в навигации у робота не было (построенная в приложении карта повернута на 180 градусов относительно приведенной выше схемы):
Убирая большое помещение, робот последовательно делит его на участки, которые обходит змейкой, а убрав так всю доступную ему площадь, он обходит ее по периметру. Согласно нашим наблюдениям, робот хорошо убрал почти везде, но, возможно, не очень тщательно убрал между стульями, задвинутыми под стол в центре комнаты (розовая на схеме выше) с площадью 10 м². В итоге можно с высокой степенью определенности утверждать, что на одном заряде и в режиме максимальной мощности робот может убрать площадь порядка 94 м² или чуть-чуть больше (без вычета мебели). Разумеется, чем свободней будет площадь, тем больше робот ее уберет на одном заряде, так как будет меньше тратить времени на объезд препятствия.
На восстановление заряда роботу требуется провести на базе примерно 4 часа 40 минут. График потребления от сети при прямой зарядке от адаптера (примерно на отметке 20 минут зарядка началась и на отметке 300 минут робот зарядился):
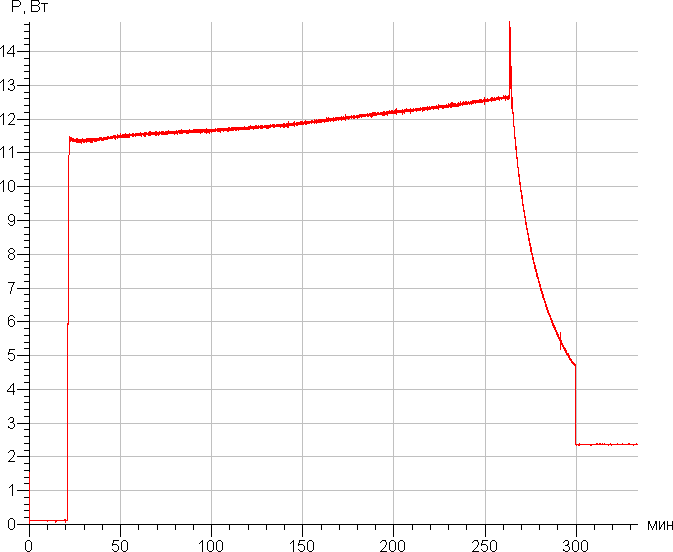
0,8 Вт потребляет адаптер и база без робота, а с зарядившимся роботом потребление при его нахождении на базе держится на уровне 3,1 Вт.
Уровень шума увеличивается при увеличении мощности всасывания:
| Мощность вентилятора | Уровень шума, дБА |
|---|---|
| Низкая | 52,8 |
| Средняя | 54,5 |
| Максимальная | 56,6 |
Даже при работе на максимальной мощности всасывания робот не очень громкий. Находиться в одной комнате с работающим роботом не очень комфортно, особенно при его работе на максимальной мощности. Однако характер издаваемого им шума не является очень неприятным. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА. Отметим, что, судя по количеству собранного легкого мусора (при работе на максимальной мощности вентилятора) даже в относительно чистом помещении и по силе выдуваемого потока воздуха в роботе установлен весьма мощный вентилятор.
Выводы
В автоматическом режиме iBoto Smart C820W Aqua убирает, по возможности однократно обходя змейкой доступную ему площадь помещения, затем выполняет финальный обход по периметру и сам возвращается на базу для зарядки аккумулятора. Убирает робот быстро и качественно. При необходимости пользователь может вручную управлять движением робота, включать режимы интенсивной очистки локального участка и уборки вдоль стен, а также регулировать мощность вентилятора. Функциональность робота дополнена способностью выполнять влажную уборку гладких полов. Подключив робота к приложению, пользователь получает дополнительные возможности по управлению роботом, с доступом к его функциям из любой точки мира, а Алиса Яндекса сможет по голосовой команде от пользователя запустить робота на уборку или заставить его вернуться на базу.
Достоинства
- Система ориентации и прокладка рационального маршрута
- Специальный блок для влажной уборки
- Удобное крепление боковых щеточек
- Есть режим с повышенной мощностью всасывания
- Управление со смартфона или планшета
- Продвинутая работа с картой: виртуальные стены, зона уборки, перемещение в заданное место
- Уборка по расписанию
- Хорошая комплектация
Недостатки
- Приложение требует включения геопозиционирования
В заключение предлагаем посмотреть наш видеообзор робота-пылесоса iBoto Smart C820W Aqua:
Наш видеообзор робота-пылесоса iBoto Smart C820W Aqua можно также посмотреть на iXBT.video
Полный текст статьи читайте на iXBT
