Робот-пылесос Hobot Legee-688: соберет мусор и отмоет грязь с гладких полов в вашей квартире
Паспортные технические характеристики, комплект поставки и цена
| Кинематическая система | гусеничный движитель (две гусеницы) |
|---|---|
| Способ сбора мусора | вакуумная фильтрация |
| Пылесборник | одно отделение, емкость 0,5 л |
| Основная щетка | отсутствует |
| Боковые щетки | одна |
| Дополнительно | сухая или влажная протирка пола, две протирочные салфетки на подвижных платформах, принудительное увлажнение пола, емкость для воды 0,32 л |
| Режимы очистки | автоматический, вдоль препятствий, змейкой, ручное управление; семь предустановленных режимов и один пользовательский с настройкой степени увлажнения, мощности всасывания, частоты движения салфеток, скорости перемещения; запуск вручную или по расписанию; |
| Уровень шума | 56 дБ (в экономичном режиме на расстоянии 1 м) |
| Датчики препятствий | механический передний/боковой бампер, лазерные ИК-датчики приближения и перепада высоты |
| Датчики ориентации | ИК-датчики поиска базы, лазерные ИК-датчики приближения, датчики вращения моторов приводов гусениц |
| Управление на корпусе | сдвоенная механическая кнопка |
| Дистанционное управление | ИК-пульт ДУ, приложение для мобильного устройства |
| Оповещение | светодиодный индикатор, звуковые сигналы, с помощью мобильного приложения |
| Время автономной работы | до 90 минут (площадь уборки 130–150 м²) |
| Время зарядки | нет данных |
| Способ зарядки | на зарядной базе с автоматическим возвратом |
| Источник питания | литий-ионный аккумулятор, 2750 мА·ч, 14,6 В, 40,15 Вт·ч |
| Масса | нет данных |
| Размеры | 340(Д)×330(Ш)×95(В) мм |
| Комплект поставки |
|
| Ссылка на сайт производителя | Hobot Legee-688 |
| Магазин официального дистрибьютора Hobot в России | Hobot Legee-688 |
Внешний вид и функционирование
Робот упакован в красочно оформленную коробку из гофрокартона, оснащенную пластиковой ручкой.

На плоскостях коробки изображен сам робот, перечислены главные особенности, приведены основные характеристики, присутствует описание режимов уборки и другая информация. Надписи на русском языке. Для защиты и распределения содержимого коробки используются форма из папье-маше, картонная коробка для аксессуаров и полиэтиленовые пакеты. В комплект поставки входят все необходимые для работы аксессуары, включая пару элементов питания типа AAA для пульта.

Запасные части и расходные материалы в комплекте поставки представлены двумя сменным складчатыми фильтрами последней ступени (один уже установлен), вторым комплектом салфеток из микроволокна (один установлен) и двумя запасными боковыми щеточками (третья устанавливается перед первым запуском). Есть и мерная бутылочка с длинным носиком, которую можно использовать для заливки воды в резервуар.

К роботу приложено достаточно подробное руководство пользователя на русском языке. Качество текста хорошее, как и качество полиграфического исполнения.
Корпус робота изготовлен из черного пластика в основном с практичной матовой поверхностью.

На крышке сверху и на части верхней панели есть накладки из прозрачного пластика с нанесенным изнутри рисунком. Сдвоенная кнопка на верхней панели изготовлена из прозрачного пластика. Сверху на нее наклеена накладка из прозрачного пластика с нанесенным снизу серебристым фоном и значками, подсказывающими основные функции этой кнопки, — запуск/остановка и возврат на базу. Оставшийся незакрытым ободок кнопки может подсвечиваться несколькими цветами ровно или с миганием в зависимости от состояния робота. В руководстве есть таблица с пояснениями, что какому режиму работы индикатора соответствует. Спереди перед кнопкой есть синий индикатор подключения к Wi-Fi-сети, просвечивающий сквозь прозрачную накладку на верхней панели. Дополнительно о своем состоянии робот информирует с помощью не очень громких звуковых сигналов. Отключить звуковое оповещение нельзя. Рядом с кнопкой на верхней панели под декоративной накладкой есть ИК-приемник команд с пульта ДУ.

В плане задняя часть корпуса круглая (вернее, полукруглая), но спереди корпус переходит в прямоугольную часть без изменения ширины. Такая геометрия позволила сделать широкий воздухозаборник, через который пылесос всасывает мусор с пола, и сдвинуть его максимально вперед. В итоге даже при фронтальном приближении робот может собирать мусор почти впритык к препятствию. При этом расположенная в углу максимально близко к краю корпуса боковая щеточка может более эффективно выметать мусор из углов, в сравнении с роботами-пылесосами у которых корпус имеет традиционно круглую геометрию. Правда из-за такой угловатости робот уже не может совершать разворот на месте без изменения границ, занимаемой им площади. Это могло бы создавать проблемы в узких местах, но, как показала практика, не создает — если робот не может развернуться, то он просто выезжает, пятясь назад.

Согласно нашим измерениям ширина корпуса робота равна 340 мм, длина 333 мм, а высота 96,5 мм. В снаряженном, но не заправленном водой состоянии весит робот 3356 г.
С правого и с левого бока робот выглядит очень похоже. За тонированными окошками, расположенными сразу за бамперами, находятся лазерные ИК-датчики препятствий, датчики поиска базовой станции и ИК-приемники команд с пульта.


Во всю переднюю часть корпуса с небольшим заходом на бока идет подпружиненный бампер с небольшим ходом. Сдвиг бампера вызывает срабатывание механических датчиков препятствий. Различаются нажатия на правую и левую часть бампера, а также его сдвиг при касании препятствия справа и слева. Для защиты мебели спереди на бампер в нижней его части наклеена полоса из резины средней жесткости.

Лазерные ИК-датчики препятствий, датчик поиска базовой станции и ИК-приемник команд с пульта работают через отверстия на бампере. Бампер легко снимается, что позволяет очистить датчики препятствий. Производитель рекомендует чистить датчики перед каждым использованием робота, но на самом деле достаточно выполнять эту процедуру по мере необходимости.

По центру сзади есть контактные шины для зарядки аккумулятора робота и отверстие, за которым находится «пищалка» — миниатюрный излучатель звука.

На днище расположены боковая щеточка, две подвижные платформы, две гусеницы и два распылителя воды. Ближе к краю сразу за бампером находятся два лазерных ИК-датчика перепада высоты, благодаря которым робот может избежать падения со ступенек.

Гусеницы представляют собой замкнутые резиновые зубчатые ремни, натянутые между двумя роликами: один ролик зубчатый, ведущий, а второй — гладкий, ленивец. Грунтозацепов на гусеницах нет, но по факту робот не буксует даже на мокром полу. Блоки с движителями подпружинены и могут перемещаться вверх-вниз с ходом примерно 5 мм. С одной стороны это немного улучшает проходимость робота, с другой — помогает в нужной пропорции распределять усилие прижима между гусеницами и чистящими салфетками. Если прижим к полу будет слишком слабым у гусениц, то робот будет буксовать, а если у салфеток — то хуже чистить пол.

Примерно по центру гусениц в углублении расположены направленные внутрь распылительные сопла, через которые робот орошает пол водой. Сопла сменные, их легко можно снять для чистки или замены. Производитель не поскупился обеспечить пользователя четырьмя запасными соплами и даже двумя запасными крепежными винтами.

Боковая щеточка имеет недлинную и пластиковую щетину средней жесткости, пучки которой выходят из упругих поводков. Как показала практика, эта щетина хорошо сохраняет форму, а если потеряет, то форму можно восстановить, обдав щеточку кипятком. К оси привода щеточка крепится с помощью пластиковых защелок, что очень удобно.

Отметим, что редуктор привода щетки позволяет проворачивать ее рукой. Напротив, гусеницы от внешнего усилия не прокручиваются, что может осложнить извлечение робота, например, из-под дивана, под которым он застрял.
Платформы на днище робота оснащены электрическим приводом, смещающим их синхронно попеременно то сдвигая друг к другу, то раздвигая врозь. Каждая из платформ смещается на 12 мм максимум. На передней платформе в передней ее части есть воздухозаборник, через который робот засасывает мусор с пола. В нем есть вырезы спереди и с боку для захвата крупного мусора. На платформы на липучках закрепляются толстые махровые салфетки.

Откинув крышку сверху, пользователь получает доступ к выключателю питания, к бачку для воды и к пылесборнику.

Заливное отверстие емкости для воды закрывается пробкой из упругого пластика. Бачок несъемный, что очень неудобно, так как, во-первых, для залива воды приходится использовать подходящую промежуточную емкость, например, бутылочку из комплекта поставки, просто из под крана воду залить сложно и небезопасно; во-вторых, вылить воду из бачка очень сложно, приходится ее чем-то отсасывать, а сливать воду нужно, например, перед транспортировкой робота.

Пылесборник наоборот, съемный и даже оснащен откидывающейся ручкой, с помощью которой его легко извлекать и удобно переносить к месту очистки. Корпус пылесборника выполнен из прозрачного пластика, поэтому степень его заполнения можно оценить, не открывая его крышку. Специальная шторка из прозрачного пластика предотвращает выпадение мусора через отверстие для входа воздуха. Крышка пылесборника откидывается на большой угол, что позволяет без труда вытряхнуть скопившийся мусор или почистить пылесборник обычным пылесосом с щелевой насадкой, вынув перед этим рамку с предварительным сетчатым фильтром.

Для полной очистки нужно вынуть рамку со складчатым фильтром тонкой очистки и почистить его тоже.
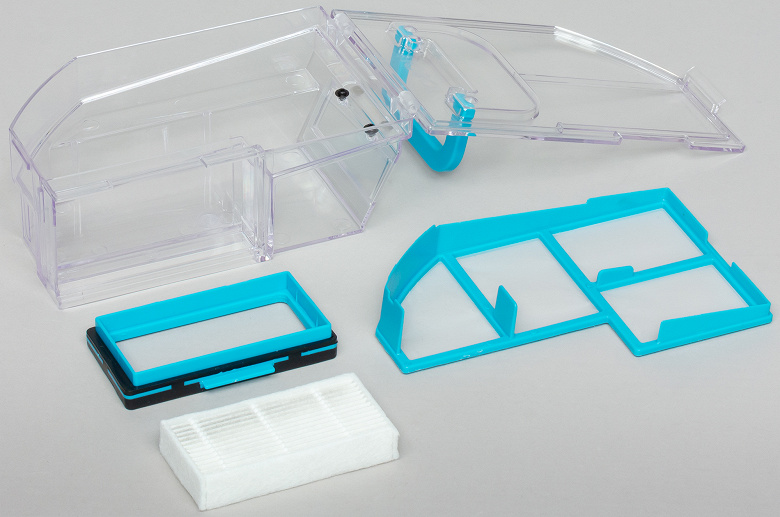
Отметим, что вентилятора в самом пылесборнике нет, поэтому пылесборник и сетчатый фильтр можно мыть под водой, главное потом все хорошо высушить. Также чистить фильтры удобно простым пылесосом с щелевой насадкой.
Упругие прокладки перед входным отверстием пылесборника и на рамке со складчатым фильтром снижают паразитный подсос воздуха мимо пылесборника и фильтров. Выдувается воздух внутрь корпуса робота и наружу выходит преимущественно через отверстие над задней платформой.
База, на которой пылесос заряжается, имеет небольшое основание, на которое снизу наклеены четыре противоскользящие резиновые ножки-накладки. Дополнительную устойчивость базе придает съемный упор из белого пластика.

Питается база от внешнего адаптера питания. Длина кабеля от адаптера равна 1,5 м. Спереди на базе есть две длинные подпружиненные контактные площадки.

К роботу прилагается небольшой ИК-пульт дистанционного управления.

Доступ к большему количеству функций пользователь получает посредством мобильного приложения, о котором будет рассказано ниже.
При уборке во время движения вперед передняя боковая щеточка подгребает мусор из углов и от стен к воздуховоду, через который робот засасывает мусор в пылесборник. Салфетка на передней подвижной платформе выполняет сухую протирку пола. Два сопла разбрызгивают на пол воду, увлажняя грязь и пятна. Затем салфетка на задней подвижной платформе оттирает пол от размягчившейся грязи.

Перед началом уборки в емкость для воды нужно налить воду (лучше деминерализованную) или разбавленное водой специальное средство Hobot Legee. А в связи с распространением коронавирусной инфекции на сайте официального дистрибьютора Hobot в России появилась следующая рекомендация:
Впрочем, с нашей точки зрения, хлорный отбеливатель в данном случае все же лучше не использовать.
Дополнительно рекомендуется увлажнить салфетку на задней платформе, распределив по ней 20 мл жидкости. При запуске не с базы робота лучше направить на прямой участок стены, чтобы он выровнял по ней свою траекторию движения.
Автоматический (Стандартный) вариант движения робота является основным. При этом во время уборки робот делит убираемую площадь на участки 4,4×4,4 м. Обходит каждый участок змейкой и переходит к следующему. По окончании уборки робот убирает доступную ему площадь по периметру ее границы и возвращается на базу для подзарядки. Кроме того, с пульта можно включить вариант движения только по периметру, а из мобильного приложения — только по периметру или только змейкой.
Режим уборки в кухне (режим Кухня) отличается тем, что робот делит площадь на участки 1,5×1,5 м, сначала обходит каждый участок, разбрызгивая много воды, растворяя грязь, а затем обходит участок змейкой повторно, оттирая грязь и собирая излишки воды. Запустить этот режим можно с пульта или из приложения.
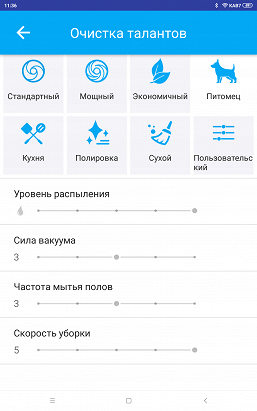
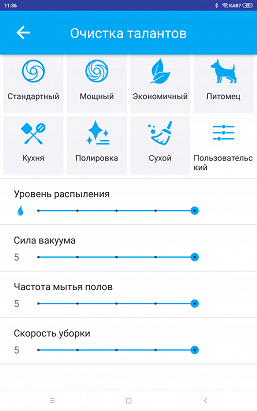
Только с помощью приложения в дополнение к режимам Стандартный и Кухня можно выбрать один из шести режимов уборки, различающиеся степенью увлажнения пола, мощностью всасывания, частотой движения салфеток и скоростью перемещения, а в пользовательском режиме эти параметры можно настраивать вручную. В этих режимах алгоритм обхода помещения такой же, что и в режиме Стандартный.

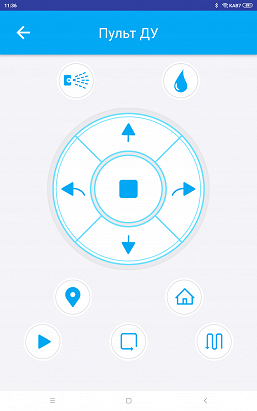
Независимо от текущего режима во время уборки с пульта или с помощью приложения можно менять мощность всасывания, включать/выключать разбрызгивание воды, заставить робота однократно разбрызгать воду, остановить уборку, вернуть робота на базу. Также доступен режим уборки с ручным управлением движением робота.
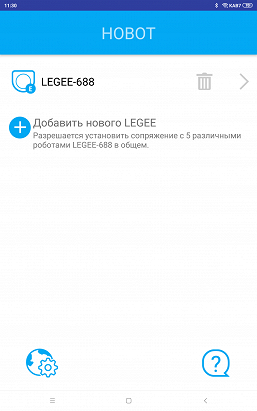

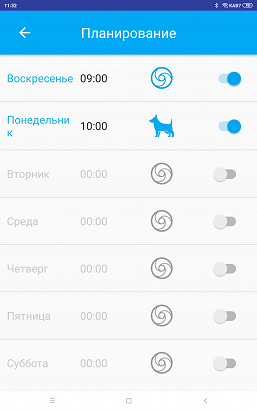
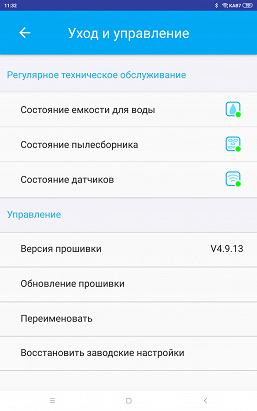
Приложение Hobot Legee устанавливается на мобильные устройства с Android и iOS. Из Google Play приложение не получается установить на устройства, в которых нет модуля сотовой связи. Это очень странное ограничение, но при желании его можно обойти, установив приложение из файла APK, что мы в итоге и сделали. Запустив приложение первый раз, нужно установить связь с роботом, который должен быть в радиусе действия Wi-Fi-сети (только 2,4 ГГц). Для управления роботом используется глобальный облачный сервис, по крайней мере, нам удалось запустить робота, находясь в области действия другой сети Wi-Fi. Побочным следствием этого является зависимость от доступности сервера. Приложение русифицировано, в нем есть довольно много справочной и другой полезной информации. Кроме описанных выше функций приложения, присутствуют еще несколько: расписание уборки по дням недели (хотя это и не очень актуально, так как салфетки лучше простирать сразу после использования), отслеживание состояние робота, подача звукового сигнала, чтобы быстрее найти заблудшего робота и т. д.


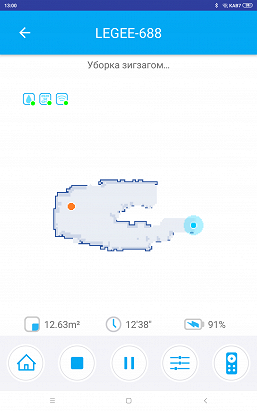
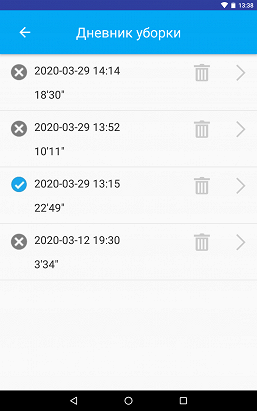
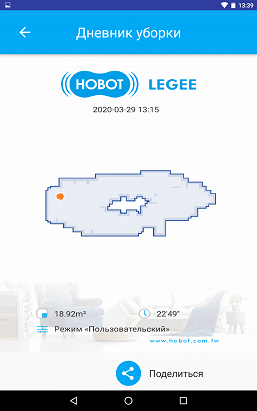
Во время уборки в окне приложения отображается карта, которую строит робот, что, например, позволяет контролировать его поведение и предпринимать меры, улучшающие качество и скорость уборки, например, выбрать другое место для запуска робота, переставить мебель и т. д. Источником дополнительных сведений служит журнал уборок, в котором сохраняются карты и другие данные.
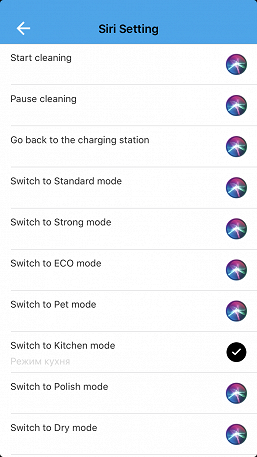
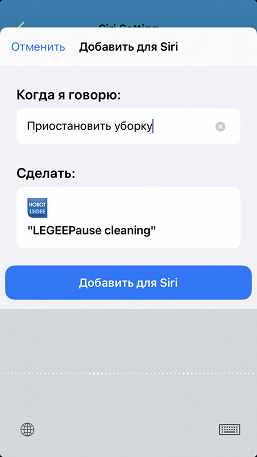
Если использовать мобильные устройства Apple, то роботом можно управлять с помощью голосового помощника Siri. Поддерживаются команды начала уборки, приостановки уборки, возврата на базу и выбора режимов уборки.
Тестирование
Тестирование этого робота для протирки полов было несколько поверхностным, так как у нас нет ни подходящей методики для оценки качества мойки полов, ни подходящего для серьезных тестов помещения. На пробу мы запускали робота в нескольких помещениях с линолеумом и кафельной плиткой на полу.
Тестирование показало, что робот хорошо сохраняет ориентацию, даже после мелких неприятностей в виде застревания в сложных местах и нашей помощи в их устранении. Погрешности в определении текущего положения есть, но они небольшие. Итоговые карты по окончании уборки что помещения из одной комнаты, что из нескольких близки к реальности. Примеры построенных карт:
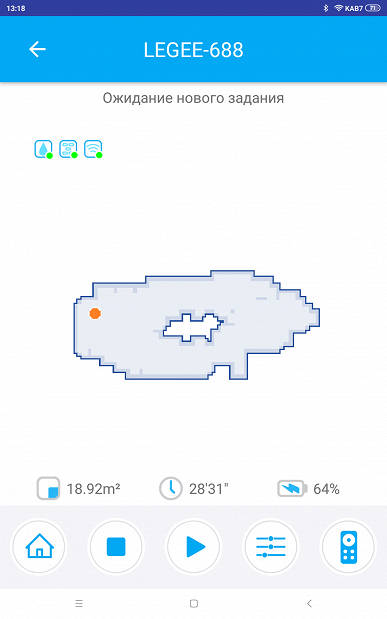

Удобно то, что при запуске в достаточно больших помещениях и с достаточно длинными прямыми участками стен робот сам выравнивает траекторию движения, в итоге обход змейкой происходит перпендикулярно и параллельно стенам, что ускоряет уборку и повышает ее качество. В небольших помещениях со сложной конфигураций и большим количеством препятствий робот может неправильно определить ориентацию стен, в этом случае помогает перебор мест запуска на уборку. Робот достаточно дотошный, он старается особенно уже в ходе финального обхода по периметру забраться туда, куда в принципе проходит по габаритам. В таких местах он не всегда может развернуться, чтобы выехать, но это его не смущает, и он просто пятится назад до тех пор, пока не выберется на простор. Во время обхода змейкой робот может не касаться светлых вертикальных поверхностей преград, но при обходе по периметру робот или периодически касается стен, или едет вдоль них на минимальном расстоянии. Тестировали робота мы в пользовательском режиме, в котором все — степень увлажнения, мощность всасывания, частота движения салфеток и скорость перемещения — были установлены на максимум. Впрочем, по факту робот все равно увлажняет пол очень умеренно. Влажный, именно влажный, а не мокрый след был немного уже ширины задней салфетки, и периодически по его середине появлялась сухая полоса. Так что даже в этом режиме, с нашей точки зрения, робота допустимо использовать, например, на невлагостойком ламинате. Мощности всасывания достаточно, чтобы робот хорошо собирал легкий мусор, а по окончании теста в пылесборнике даже обнаружилось некоторое количество песочка, нанесенного в комнаты с улицы. Проходимость робота низкая, но стык напольных покрытий, закрытый плоским порожком-планкой робот преодолевает, главное, чтобы на порожке не было выступающих головок шурупов.
От одного заряда аккумулятора в режиме, описанном выше, робот убирал примерно 1 ч. 8 мин. до уровня заряд в 20%, после чего перестал увлажнять пол, снизил мощность всасывания и частоту движения салфетками и начал поиск базы. В общей сложности по нашей оценке робот убрал примерно 100 м² (с учетом площади, занятой мебелью). Разумеется, чем свободней будет площадь, тем больше робот ее уберет на одном заряде, так как будет меньше тратить времени на объезд препятствия. Также площадь уборки на одном заряде явно увеличится при снижении мощности всасывания и частоты движения салфеток. Израсходовал робот 148 мл воды из 310 мл, залитых в бачок (больше не помещается). И это на максимальной степени увлажнения, в которой расход явно мог бы быть выше. На полную зарядку роботу требуется провести на базе 3 ч. 30 мин. Отметим, что базу нужно ставить вплотную к вертикальным поверхностям, идущим прямо от пола, так как при наличии плинтуса во время парковки робот с большой вероятностью завалит базу назад и не сможет начать заряжаться.
Уровень шума увеличивается при увеличении мощности всасывания и частоты движения салфеток:
| Мощность всасывания / частота движения салфеток | Уровень шума, дБА |
|---|---|
| 1/1 | 59,4 |
| 2/2 | 61,9 |
| 3/3 | 63,4 |
| 4/4 | 64,3 |
| 5/5 | 66,4 |
Робот относительно громкий, особенно при работе на максимальной мощности всасывания. Находиться в одной комнате с работающим роботом не очень комфортно. Однако характер издаваемого им шума не является очень неприятным. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА.
Выводы
Убирая, робот Hobot Legee-688 собирает с пола мусор, увлажняет поверхность пола и интенсивно оттирает с него размягченную грязь. Способность сохранять ориентацию и строить карту убираемого помещения повышает скорость и качество уборки. При необходимости пользователь с помощью мобильного приложения может гибко настраивать параметры уборки, отслеживать, как работает робот, и оперативно вмешиваться в процесс. С нашей точки зрения, учитывая особенности конструкции и степень воздействия на пол, этот робот хорошо справится с уборкой гладких полов, с такими покрытиями как ламинат, линолеум, плитка и т. п.
Достоинства
- Система ориентации и прокладка рационального маршрута
- Удобное крепление боковой щеточки
- Удобный пылесборник
- Управление с помощью мобильного приложения
- Гибкая настройка режима уборки
- Уборка по расписанию
- Хорошая комплектация
Недостатки
- Несъемный бачок для воды
- Высокий уровень шума в режимах с высокой мощностью вентилятора
В заключение предлагаем посмотреть наш видеообзор робота для уборки пола Hobot Legee-688:
Наш видеообзор робота для уборки пола Hobot Legee-688 можно также посмотреть на iXBT.video
Полный текст статьи читайте на iXBT
