
Робот-пылесос iRobot Roomba i7+: продвинутая навигация по комнатам и автоматическое опустошение пылесборника
Паспортные технические характеристики, комплект поставки и цена
| Номер модели | i7558 |
|---|---|
| Кинематическая система | два ведущих колеса и опорный поворотный ролик |
| Способ сбора мусора | инерционное перемещение и вакуумная фильтрация |
| Пылесборник | одно отделение, емкость 0,4 л |
| Основная щетка | два безворсовых валика-скребка |
| Боковые щетки | одна |
| Режимы очистки | автоматический с навигацией в один или два прохода, локальный, по расписанию |
| Уровень шума | нет данных |
| Датчики препятствий | механический передний/боковой бампер, ИК-датчики приближения и перепада высоты |
| Датчики ориентации | нижняя видеокамера, верхняя видеокамера, ИК-датчики поиска базы и определения виртуальных стен, 3-осевые акселерометр и гироскоп |
| Управление на корпусе | сенсорные кнопки |
| Дистанционное управление | по Wi-Fi через мобильное приложение iRobot Home |
| Оповещение | светодиодная индикация, звуковые сигналы и голосовое оповещение об ошибках, через приложение iRobot Home (в т. ч. через push-уведомления) |
| Время автономной работы | 75 минут |
| Время зарядки | 90 минут |
| Способ зарядки | на зарядной базе с автоматическим возвратом |
| Источник питания | литий-ионный аккумулятор, 14,4 В, 1800 мА·ч, 26 Вт·ч |
| Потребляемая мощность | нет данных |
| Масса | 3,4 кг |
| Размеры (диаметр×высота) | ∅34×9,2 см |
| Комплект поставки |
|
| Ссылка на сайт производителя | iRobot Roomba i7+ |
| Ссылка на сайт официального авторизованного дистрибьютора | iRobot Roomba i7+ |
| Розничные предложения |
Внешний вид и функционирование
Упакован робот и все к нему в большую невзрачную коробку из гофрированного картона.
На самом деле это внешняя коробка, которая защищает внутреннюю коробку из картона потоньше.

Оформление этой коробки строгое, но насыщенное — фотографии, схема очистки пылесборника на базе, перечисление комплектации. Надписи выполнены на нескольких языках, включая русский. Внутри этой большой коробки находятся база и две небольших коробки: одна с аксессуарами и еще одна с роботом. Вторая уже с пластиковой ручкой. В качестве разделителей и защитных вставок используются в основном элементы из экологически безопасного гофрированного картона. Робот защищают формы из папье-маше, поддон из прозрачного пластика и прокладка из пористого пластика.
В комплект поставки входят все необходимые для работы аксессуары. Запасные части и расходные материалы в комплекте представлены элементами питания для виртуальной стены, сменным складчатым фильтром (еще один установлен в пылесборнике), двумя мешками для сбора мусора и одной боковой щеточкой (в дополнение к той, что уже установлена на роботе).

Есть два руководства пользователя: одно к роботу, другое к базе. Руководства представляет собой брошюры из нескольких страниц с текстом на нескольких языках, включая русский. Качество текста и полиграфического исполнения высокое. Версии руководств в виде PDF-файлов можно загрузить с сайта компании.
Компания iRobot выпустила два варианта роботов Roomba серии i: модель i7 в комплекте с простой базой, обеспечивающей только зарядку робота, и с модель i7+ уже с большой базой, автоматически опустошающей пылесборник робота. У нас на тестировании, как легко заметить, был второй вариант. В принципе, в продаже есть отдельно сама база iRobot Clean Base Automatic Dirt Disposal в комплекте с пылесборником от i7+. Купив такой комплект, владелец простой модели i7 сможет улучшить ее до настоящей i7+.
Сам робот очень похож на роботы Roomba 900-й серии (мы тестировали iRobot Roomba 960 и iRobot Roomba 980), но есть ряд существенных конструктивных отличий. В частности, в роботах серии i установлен совершенно другой пылесборник, уже без вентилятора, который теперь размещен в корпусе робота.
Пылесос в плане имеет форму, близкую к кругу (длина 342 мм, ширина 341 мм), но утолщение бампера явно выражено. Возможно, это уменьшает вероятность того, что робот будет застревать в тесных местах: если пройдет бампер, то и остальная часть тоже.

Корпус пластиковый, в основном черный, с матовой поверхностью. Верхняя панель, по всей видимости, выполнена из прозрачного пластика. На нее нанесен рисунок в темных тонах или просто черное покрытие и только окошко над верхней камерой оставлено прозрачным.

С помощью этой камеры робот отслеживает свое перемещение в пространстве и, возможно, распознает помещение, в котором он начинает уборку. Также ориентироваться роботу помогают нижняя камера с ИК-подсветкой, 3-осевые акселерометр и гироскоп.
Верхняя панель ламинирована тонким слоем прочной пластиковой пленки, что защищает панель от повреждений.

Ближе к передней части на верхней панели находятся три сенсорные кнопки — большая круглая кнопка с ободком из полупрозрачного пластика и по бокам от нее две небольших в виде углублений с серебристыми значками. Ободок большой кнопки имеет многоцветную многозонную подсветку. Цвет и характер его свечения, а также белая подсветка надписи Clean указывают на то, что происходит с роботом в данный момент. Ближе к переднему краю есть откидывающаяся вверх на небольшой угол ручка, за которую пылесос удобно переносить.

Верхняя часть бампера прикрыта вставкой из плотно тонированного пластика черного с виду, но прозрачного для ИК-излучения (за ним спрятаны ИК-датчики препятствий). Вверху по центру бампера — обзорный выступающий вверх ИК-датчик, который собственно и определяет минимальную высоту (мы получили 92 мм) просвета предметов обстановки, под которые пылесос еще может забраться. Этот датчик помогает роботу парковаться на базу и избегать виртуальной стены. Никакой защиты мебели от столкновений с роботом на бампере нет.

Выраженный скос от края к днищу помогает преодолевать препятствия.


Сзади установлен пылесборник, для изъятия которого нужно нажать на фиксатор сбоку.

Перевернув пылесос вверх днищем, в передней части (сверху на фотографии) мы видим две контактные площадки, ролик на вращающейся платформе, боковую щетку, гнездо нижней камеры, далее вниз — два ведущих колеса на подпружиненных рычагах, отсек с основными валиками-щетками и дно отсоединяемого пылесборника. По периметру днища робота ближе к краю расположены шесть ИК-датчиков перепада высоты.
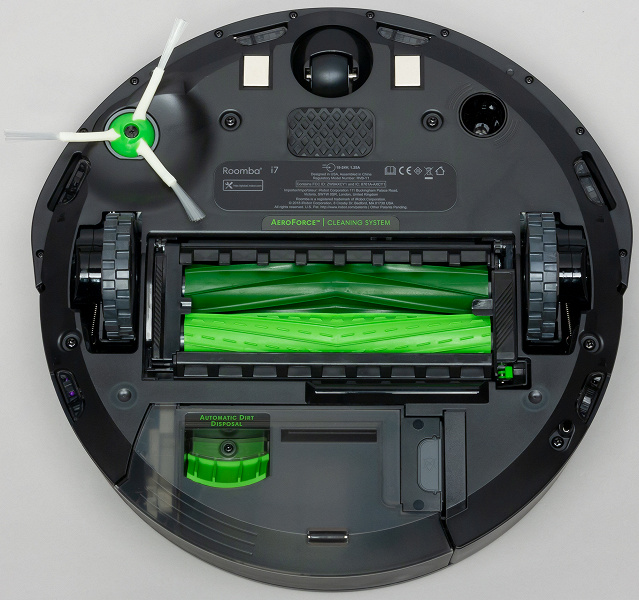
На этой фотографии рядом с правым нижним датчиком можно увидеть кисточку, предназначенную, видимо, для снятия статического электричества. Это очень важный момент, так как, убирая робот может накапливать большой статический заряд, и разряд, например, о базу, может повредить электронику робота.
Оси ведущих колес расположены на одном диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ, занимаемой роботом площади, поэтому пылесос отличается хорошей маневренностью. Диаметр ведущих колес относительно большой (71 мм), а ход шарниров в точке центров колес достигает 30 мм, поэтому робот без особых проблем преодолевает встречающиеся препятствия небольшой глубины и высоты. Потенциально робот способен преодолевать препятствия высотой где-то до 16 мм — примерно такое расстояние от пола до верхней точки скоса на днище. Весит робот 3,8 кг.
При уборке передняя боковая щеточка подгребает мусор к центру. Правильной работе этой щеточки способствует наклон ее оси внутрь, благодаря чему прижим сильнее на фазе движения сбоку-вперед. Также отметим конструкцию боковой щеточки — гибкие упругие поводки (для прочности прошитые на концах) заканчиваются относительно жесткой прямой щетиной. В результате щеточка работает эффективно и не теряет свою форму. Саморез, фиксирующий эту щеточку не выпадает из центрального отверстия (его сложнее потерять) и дополнительно имеет широкий прямой паз, поэтому снять и установить щеточку можно без крестовой отвертки, достаточно монетки.
Основных щеток две, они вращаются навстречу друг другу. На самом деле это не совсем щетки, так как они лишены ворса, но мы будем по привычке называть их щетками. Две щетки не взаимозаменяемые, но конструкцию имеют одинаковую: внешний упругий цилиндр с ребрами (не резиновый, а скорее из силикона), закрепленный на оси из твердого пластика. С одной стороны эта ось продолжена шпилькой из нержавеющей стали, на которую надета желтая втулка с бронзовым подшипником скольжения.

С другой — ось заканчивается шестигранником или квадратом, что соответствует ответной части в механизме вращения щеток. Обозначения в отсеке щеток подсказывают, какую щетку куда вставлять.

Эти щетки немного отличаются, от валиков в Roomba 800-й и 900-й серии, однако их можно взаимно переставлять, поменяв втулки с подшипниками. Напомним, что основным преимуществом таких валиков без щетины является то, что они очень мало наматывают на себя волосы, шерсть, нитки и т. д., а все немногое намотавшееся (в основном на торцы) легко снимается при очистке без использования каких-либо инструментов. Владельцы домашних животных с шерстью должны особенно оценить это. Отсек, в котором находятся основные щетки, закреплен на рычажках, поэтому с ходом примерно в 8 мм он следует рельефу пола, что увеличивает эффективность очистки. Проволочных направляющих-ограничителей нет, предотвращение наматывания уголков ковриков возложено на систему управления и контроля вращения щеток.
В состав системы определения степени загрязнения входят акустический и оптический датчики. Первый датчик по шуму ударяющихся о мембрану (желтоватый круг на фотографии ниже) микрофона частиц определяет степень загрязнения в текущем месте уборки. Второй датчик, состоящий из источника ИК-излучения и фотоприемника, просвечивает пылесборник. Соответствующее изменение степени поглощения в ИК-диапазоне позволяет также отслеживать содержание мусора в потоке воздуха, и дополнительно, указывает на переполнение пылесборника.

Вращающиеся щетки сначала подхватывают мусор с пола, затем мусор воздушным потоком перемещается в емкость пылесборника. Тяжелый мусор остается на дне емкости, а мелкий и легкий задерживается воздушным фильтром. Отметим, что такая конструкция не исключает прямой заброс тяжелых частиц в пылесборник, но делает его маловероятным. Стыки узлов и деталей на всем пути воздуха от щеток до вентилятора имеют упругие уплотнения, а щеточный узел соединен с корпусом упругим и герметичным воздушным рукавом, что уменьшает паразитный подсос воздуха. Вентилятор, установленный в корпусе робота, высасывает воздух из пылесборника и гонит его по воздуховоду в нишу отсека основных щеток, в итоге основной поток воздуха выходит через щель перед щетками и сдувает мусор с пола прямо к вращающимся щеткам. Это увеличивает эффективность сбора легкого мусора, в сравнении с предыдущими моделями Roomba, у которых воздух просто выдувался назад.
Отсоединять пылесборник относительно удобно, после некоторой тренировки удается сделать это одной рукой, не сдвигая припаркованный на базе пылесос. Для опустошения пылесборника нужно откинуть крышку, нажав на кнопку фиксатора, и вытряхнуть мусор. Затем, при необходимости, вынуть и очистить фильтрующий элемент.

Несъемная сеточка, установленная в пылесборнике, не допускает крупный мусор до складчатого мелкопористого фильтра, что облегчает его очистку. Сам пылесборник производитель рекомендует мыть по мере необходимости. Фильтрующий элемент — очищать раз в неделю, но не мыть, и менять каждые два месяца (подробности по уходу за роботом приведены в руководстве).
Чтобы добраться до аккумуляторной батареи, нужно снять боковую щеточку, открутить несколько винтов на днище и снять его. В роботе установлена литиевая батарея емкостью всего 26 Вт·ч (14,4 В, 1800 мА·ч). Конструкция батареи новая, совместимости с предыдущими поколениями Roomba нет, что случилось впервые за много лет.

База, на которой пылесос заряжается, имеет еще одну полезную функцию — она автоматически опустошает пылесборник робота.

В пылесборнике робота снизу есть отверстие, закрытое шторкой из упругого пластика. Когда робот припаркован на базе, это отверстие находится над входным отверстием воздуховода.

Воздуховод ведет в верхний отсек базы, где находится одноразовый мешок для мусора. Отсек закрывает крышка с уплотнением по периметру.
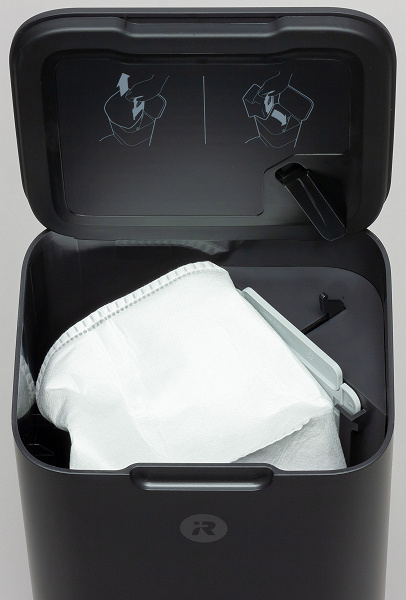
Когда робот по завершению уборки встает на базу, в базе включается мощный вакуум-компрессор, который отсасывает воздух из отсека с мешком. Разрежение, создаваемое в воздуховоде, ведущем к этому отсеку, открывает шторку на пылесборнике робота, и мусор из пылесборника потоком воздуха переносится в мешок. Вот схема с сайта производителя:

По данным производителя, мешка хватает на сбор мусора из 30 пылесборников робота. Цикл опустошения пылесборника включается каждый раз, когда робот припарковывается на базе в автоматическом режиме, также этот цикл можно запустить вручную, нажав на кнопку с изображением домика на роботе, или из мобильного приложения. Заполненный мешок за ручку извлекается из отсека в базе, при этом входное отверстие в мешке перекрывается шторкой, и никакая пыль наружу не летит.
База имеет отсоединяемый кабель питания (длиной 1,8 м) со стандартным разъемом IEC C17. Излишки кабеля можно уложить в отсек сзади на базе. Выводится кабель через углубления на правую или на левую сторону базы. Кожух воздуховода на днище базы полупрозрачный и съемный, что позволяет увидеть место засора и почистить воздуховод, при необходимости сняв кожух. Снизу на основание базы приклеено несколько рельефных резиновых площадок, в итоге база хорошо цепляется за пол с самой разнообразной поверхностью.

Стоит на полу база устойчиво, робот заезжает на нее полностью, при желании базу можно одной рукой переносить даже с роботом на ней.
Приложение iRobot Home (доступны версии для iOS и Android) для мобильных устройств теперь является одним из компонентов, обеспечивающих навигацию. Заявляется, что посредством этого приложения поддерживается голосовое управление через Alexa и Google Assistant, но, видимо, в России эта функция недоступна.
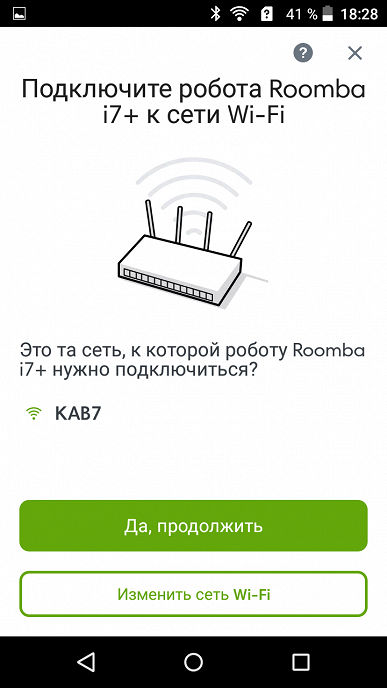
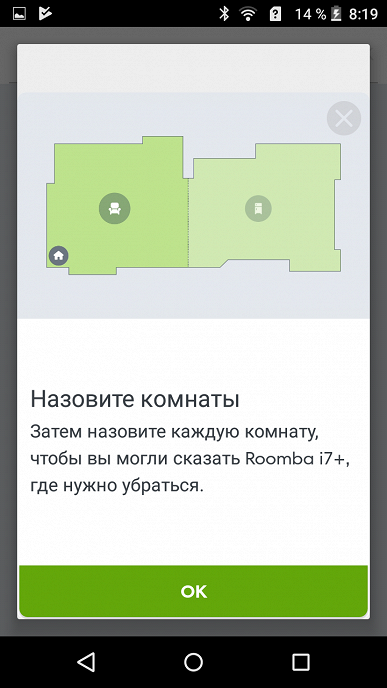
Самое главное новшество заключается в том, что робот строит карту убираемого помещения, на которой в автоматическом режиме выделяет отдельные комнаты (разделение можно исправить вручную). Притом таких карт может быть несколько (например, по этажам в доме), в зависимости от количества помещений, в которых работает робот. На созданных картах пользователь может указать роботу, в какой комнате или в каких комнатах нужно убрать. Заявляется, что построение карты возможно для помещений площадью не более 185 м², а всего храниться может не более 10 карт. На сайте производителя в ответах на вопросы встречается утверждение о возможности создания на картах прямоугольных запретных зон (Keep Out Zones), куда роботу запрещено заезжать, но на самом деле такой функции нет (или не было на момент тестирования), поэтому для ограничения доступа придется использовать виртуальную стену (см. ниже).
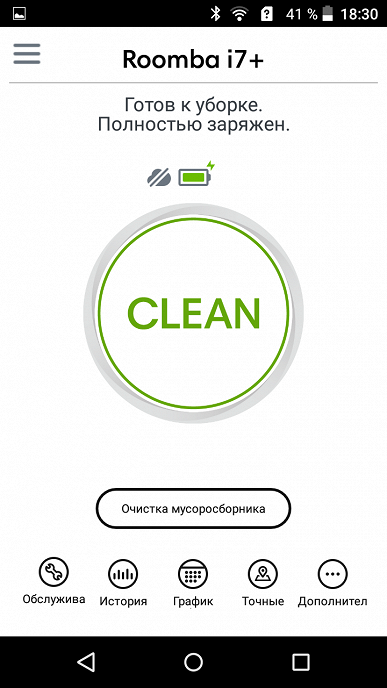
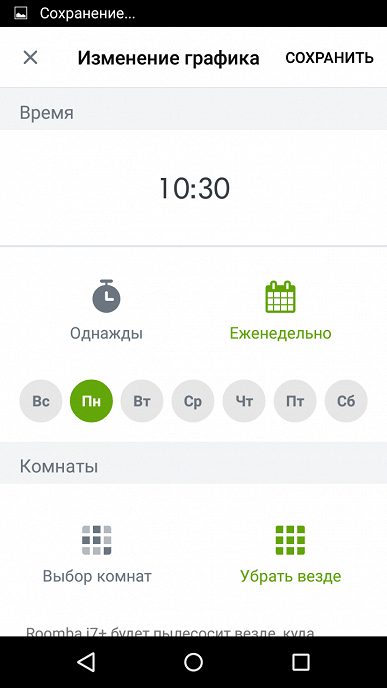
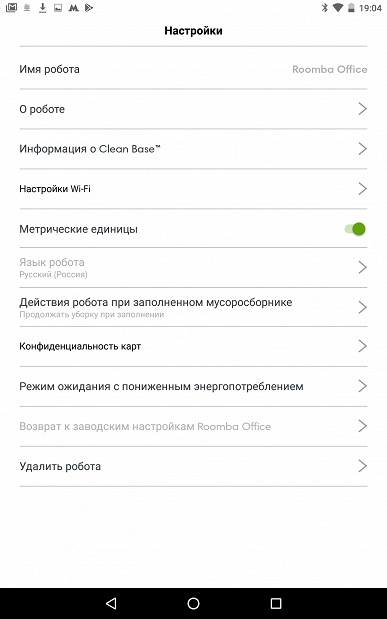
В принципе, использовать робота, можно без приложения и не подключая его к Сети, но со смартфона или планшета меняются недоступные иначе настройки робота, именно с помощью iRobot Home можно задать расписание работы на неделю (везде или с выбором комнат, однократно или раз в неделю в выбранные дни, в один или в два прохода, или в автоматическом режиме), приложение поможет понять, в каком состоянии сейчас робот, покажет текстовое подробное руководство, даст ответы на часто задаваемые вопросы и даже подскажет, что пора заменить, и поможет купить запасные части, и т. д., и т. п. И все это на понятном русском языке (хотя переводчикам нужно научиться понимать различие между действиями «убирать» и «убираться»).

Обновления для робота загружаются по Wi-Fi и устанавливаются, видимо, в принудительном порядке. Отметим, что поддерживаются сети Wi-Fi в диапазонах 2,4 и 5 ГГц. Второй диапазон для устройств IoT пока еще редкость. Робот запоминает только одну сеть, поэтому не может автоматически переключаться при переходах между сетями. Связь приложения с роботом осуществляется как через облачный сервер, так и локально, когда робот и мобильное устройство находятся в одной сети. Поэтому приложение имеет доступ к роботу из любой точки, где есть интернет (но не все настройки доступны через облако), а при наличии проблем на стороне сервера или без доступа к Сети управлять роботом из приложения все равно можно. Заявлено, что робот может управляться через приложение, установленное на нескольких устройствах, но у нас после подключения к планшету приложение на смартфоне сообщило, что теперь оно не имеет доступа к роботу.
iRobot Roomba i7+ имеет два основных режима уборки:
- Автоматическая уборка всей доступной площади или выбранных комнат. По окончании уборки или при необходимости подзарядки пылесос возвращается на базу.
- Режим локальной очистки — интенсивная очистка определенного участка (диаметром в 1 м по данным из руководства). В нужное место пылесос переносится пользователем.
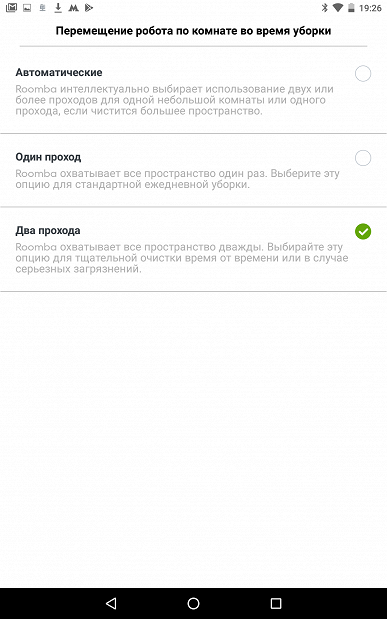
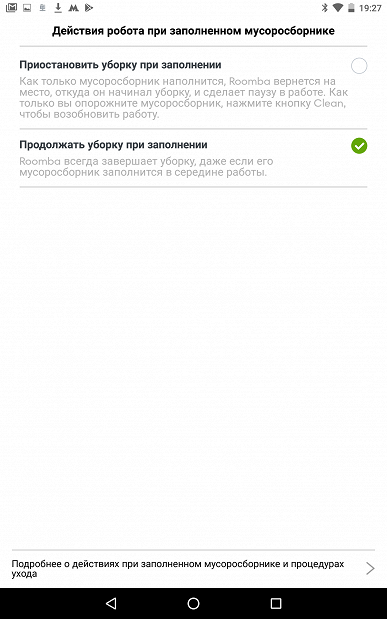
При использовании мобильного приложения становятся доступными две опции: выполнять уборку за один проход, за два или за два и более для малых помещений и за один для больших (так по умолчанию); продолжать работу при заполненном пылесборнике или приостановить уборку при его переполнении.
Режима с ручным управлением не предусмотрено и в руководстве он не упоминается.
Пространственно организовать уборку поможет виртуальная стена — специальное устройство, входящее в комплект поставки (в коробке с этим роботом одна, но при необходимости, стены можно докупить дополнительно).

Это устройство работает от двух элементов питания типа АА. Стена может работать в двух режимах. В первом в направлении (указано полоской сверху) от виртуальной стены создается невидимая преграда (длиной 3 м по заверениям производителя), которую пылесос не пересекает. С помощью такой преграды можно отгородить места, где выполнять уборку нежелательно. Во втором стена работает в режиме кругового ограничителя, не подпуская к себе робота ближе определенного расстояния (заявляется о радиусе в 60 см). Фактически во втором случае режим направленной преграды просто не активируется, работает только круговой излучатель на верхушке башенки. Типичный пример использования кругового ограничителя — это создание защитного барьера вокруг мисок с кормом и водой для домашних четвероногих питомцев. Включается и выключается устройство трехпозиционным переключателем сбоку, им же выбирается режим работы. В обычной ситуации выключать устройство необязательно (видимо, оно активируется само при приближении робота), при этом производитель утверждает, что в таком случае от одного комплекта источников питания стена может работать 8–10 месяцев. И только в случае планируемого длительного неиспользования для продления срока работы элементов питания стену желательно выключать.
О своем состоянии пылесос информирует с помощью светодиодных индикаторов, кроме того, о переходах между некоторыми состояниями пылесос сообщает, проигрывая короткую мелодию, а ошибки робот проговаривает соответствующей фразой на выбранном пользователем языке (русский язык доступен). Отключить звуковое/голосовое оповещение нельзя. Ну и, конечно, не забываем о мобильном приложении — с его помощью находясь в любой точке мира (главное, чтобы Сеть была) можно узнать, что робот делает в данный момент. Ну и прочее — сколько всего убрал, сколько раз запускался, текущий уровень износа и т. д. Жалко что картинку с камеры нельзя подсмотреть, и, как заверяет производитель, нельзя в принципе. В случае, если пользователь уезжает на длительный срок, например в отпуск, робота можно перевести в режим низкого потребления, в котором приложение не имеет доступа к роботу и расписание уборки не активно.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье:
| Время уборки, ММ: СС | % (суммарный) |
|---|---|
| Уборка в один проход | |
| 13:16 | 87,5 |
| 9:38 | 94,5 |
| Уборка в два прохода | |
| 25:21 | 94,9 |
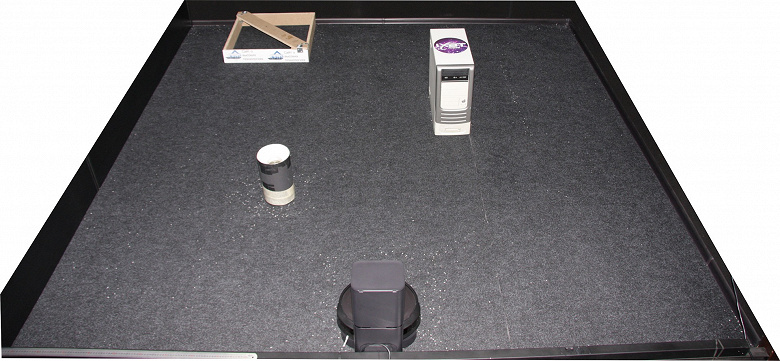
Видео ниже снято с одной точки с почти полным охватом убираемой территории, база находится внизу по центру, первый запуск на уборку в один проход, при обработке часть видеоряда ускорена в десять раз:
Робот определенно строит и использует карту, это видно по маршруту движения — он заполняет змейкой всю доступную площадь, при этом по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить. В конце робот убирает по периметру помещения и возвращается к базовой станции. При обнаружении загрязненного участка робот медленно прокатывается взад-вперед два раза и затем продолжает уборку в обычном режиме. В узкий загончик (шириной на 5 см шире корпуса робота) пылесос обычно заезжал, пусть и не очень охотно. В режиме с двумя проходами второй раз робот меняет направление проходов на перпендикулярное, что, по идее, должно улучшать качество перекрытия поверхности пола:
При приближении к препятствию, которое робот может определить ИК-датчикам, он немного замедляет скорость движения, но все равно движется вплоть до срабатывания бампера. Иногда робот после этого немного отъезжает назад и снова стукается о препятствие, как бы убеждаясь, что тут проехать действительно нельзя. Временные препятствия, обнаруженные роботом там, где по его мнению их быть не должно, на какое-то время могут сбивать ориентацию робота, но через некоторое время он ее восстанавливает. С базой робот обращается аккуратно — не было случая, чтобы пылесос сдвинул базу после начала уборки, и робот в наших тестах всегда заезжал на базу с первого раза. Однако при этом непосредственно около базы остается немного мусора. Несмотря на черный ковролин на полу (пусть и слегка потертый) на роботе не пришлось заклеивать датчики отрыва от пола, поэтому, возможно, у пользователей будет меньше проблем с тем, что робот не убирает темные участки пола.
После уборки с одним проходом заметное количество мусора остается на площади и около базы:
После второго прохода или уборка в режиме с двумя проходами ситуацию гораздо лучше:
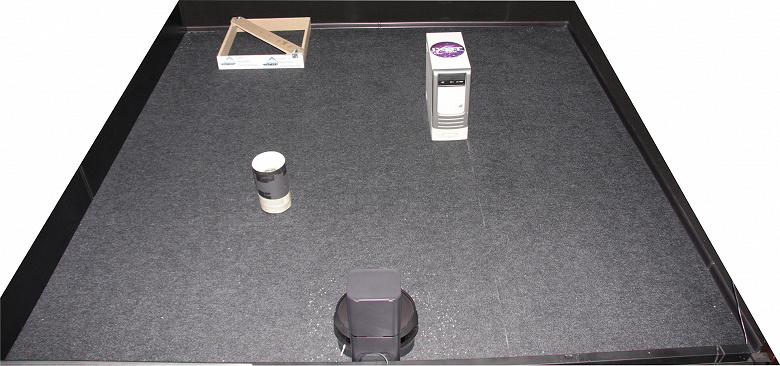
На площади практически нет, но рис остался в непосредственной близости от базы:

Совсем чуть-чуть в углах:

И немного в узком тупичке:
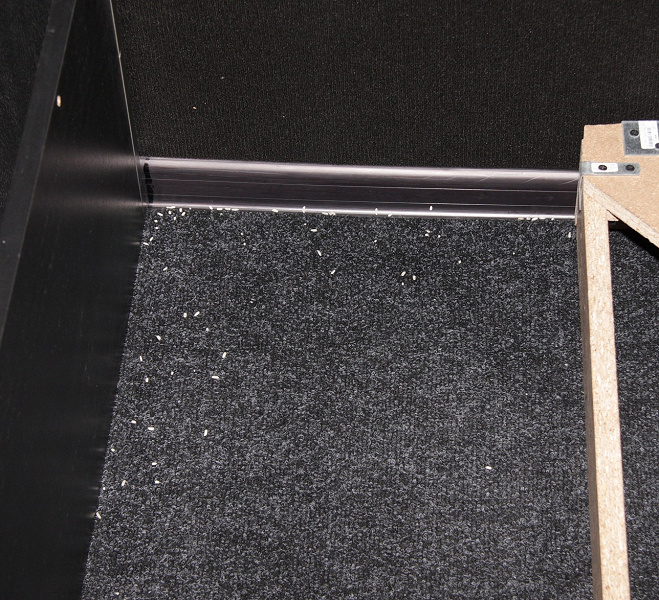
В целом качество уборки принципиально не отличается от того, что мы получили при тестировании iRobot Roomba 980 и 960. После автоматического опустошения пылесборника робота в нем может остаться порядка 20% риса. В одном из тестов случилась ожидаемая ситуация: зернышко риса застряло между шторкой из упругого пластика и краем отверстия в пылесборнике:

Такое может происходить и во время реального использования робота, при этом далеко не факт, что повторное автоматическое опустошение в случае настоящего мусора устранит щель. Подобная щель снижает эффективность уборки из-за паразитного подсоса воздуха. Очевидно, что автоматическое опустошение пылесборника не исключает периодический осмотр робота и его чистку — только так можно сохранить высокую эффективность уборки и снизить износ робота. Отметим, что вручную чистить пылесборник не очень удобно из-за сложной конфигурации отсека для мусора.
В полной темноте робот не убирает — он начинает уборку, но аварийно ее завершает с ошибкой. Это существенное ограничение в функциональности робота, притом очевидно, что нижней камеры, гироскопа и акселерометра должно хватать для того, чтобы робот смог сохранить ориентацию и в полной темноте, но приоритет оставлен за направленной вверх камерой.
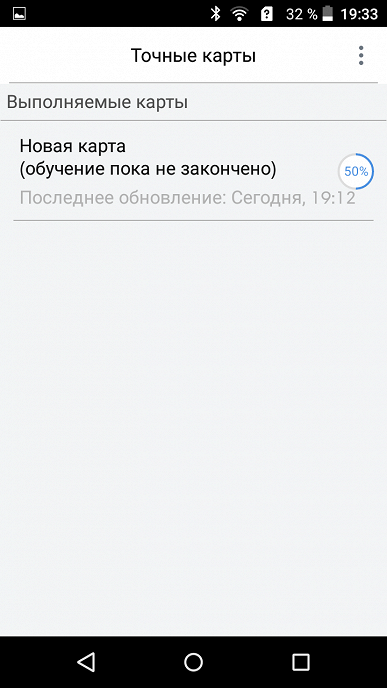
Непосредственно во время уборки пользователь не может видеть в мобильном приложении создаваемую роботом карту и где именно находится в данный момент робот. Это не очень удобно. Кроме того, после первой уборки в новом помещении робот даже не рисует карту, а сообщает, что обучение не закончено. Только после второго прохода карта готова, и пользователь может с ней работать (построена карта тестового помещения, показанного на фотографиях выше):
Чтобы ускорить процесс обучения, робота можно запустить в ознакомительном режиме, в котором он не убирает, а только исследует помещение. Это особенно полезно в случае больших по площади помещений, в которых робот может и не убрать за один раз.
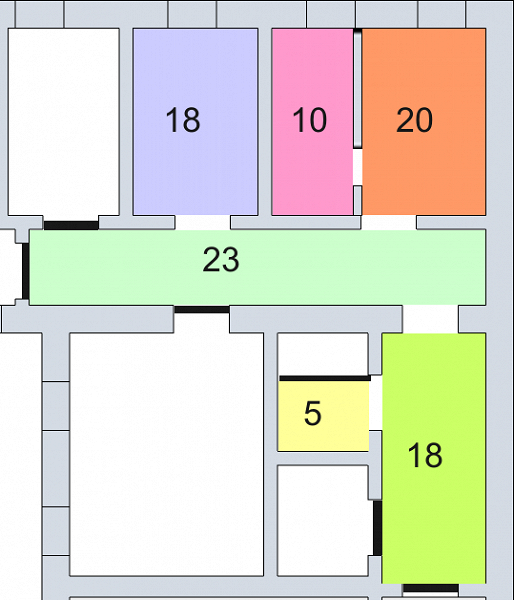
Дополнительно были проведены натурные испытания. Для этого в офисном и относительно чистом помещении был выгорожен участок из нескольких комнат общей площадью примерно 94 м². В коридоре (23 м²) только шкаф в торце, в других помещениях заполнение мебелью среднее, людей нет. Схема помещения приведена ниже. На ней цветными прямоугольниками отмечены доступные роботу комнаты. База робота установлена на схеме внизу справа:
Первый запуск был произведен в ознакомительном режиме. Помещение робот обследовал за 1 ч 15 мин. В результате карту робот построил, хотя обучение еще не завершил:
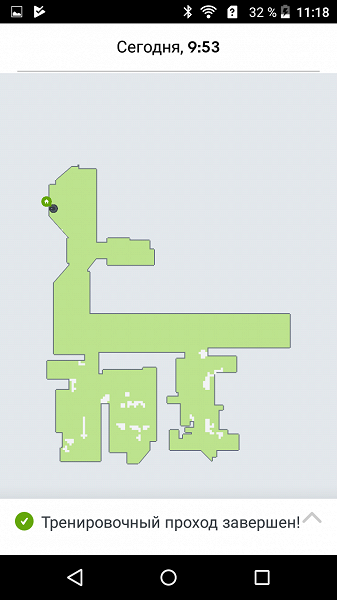
Построенная карта хорошо совпадает с реальностью и очень похожа на схему выше, если повернуть ее на 180 градусов.
После этого обучающего запуска, робот восстановил заряд батареи, и мы запустили его на уборку в режиме с двумя проходами. Робот выполнил первый проход и, видимо, едва успел начать второй проход, как после 1 ч 32 мин. вернулся на базу для подзарядки, где провел 1 ч 9 мин. Зарядившись, робот продолжил уборку и убирал еще 1 ч 2 мин.
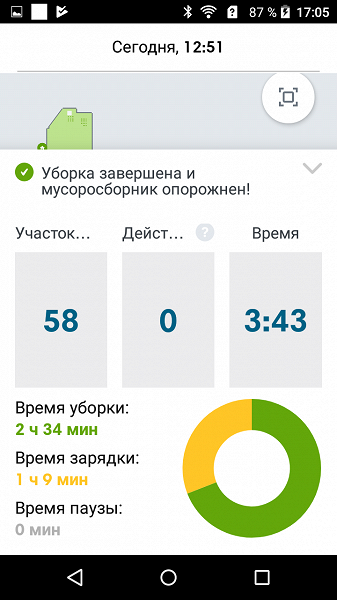
То есть робот убирал 94 м² в течение примерно 150 минут, а всего с одной промежуточной подзарядкой может убирать 180 минут (два раза по 1 ч 30 мин.). Получается, что за два прохода с одной подзарядкой робот сможет убрать примерно 112 м², или 56 м² за два прохода без подзарядки.
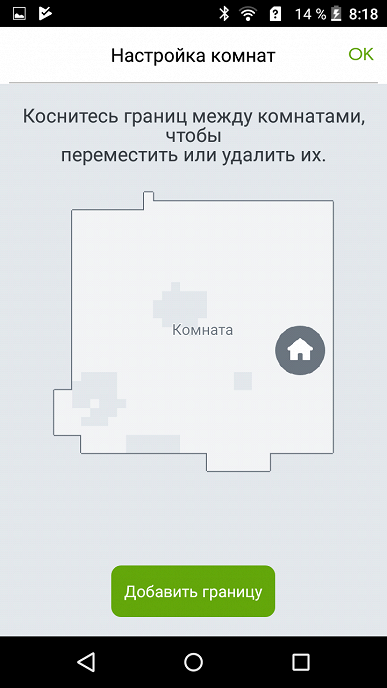
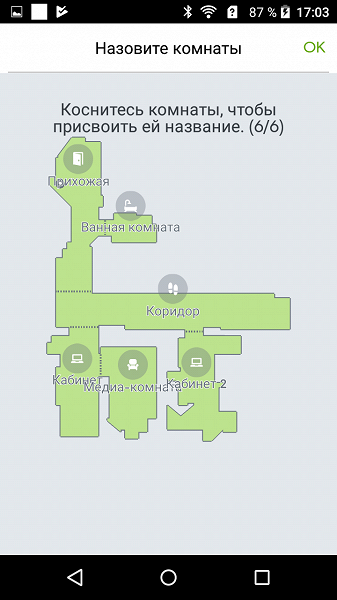
После такой уборки за два прохода робот завершил обучение и даже поделил помещение на комнаты, частично угадав реальные границы:

Небольшие правки границ, выбор подходящих значков и названий для комнат, и вот результат — готовая карта помещения:
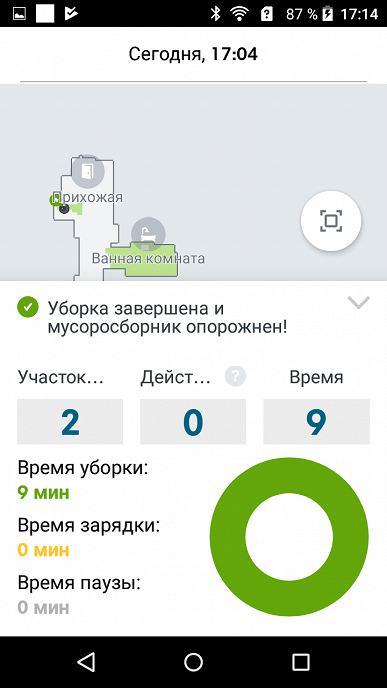
Теперь робота можно послать убрать, например, в ванной комнате, что он и сделает, в данном случае за 9 минут:
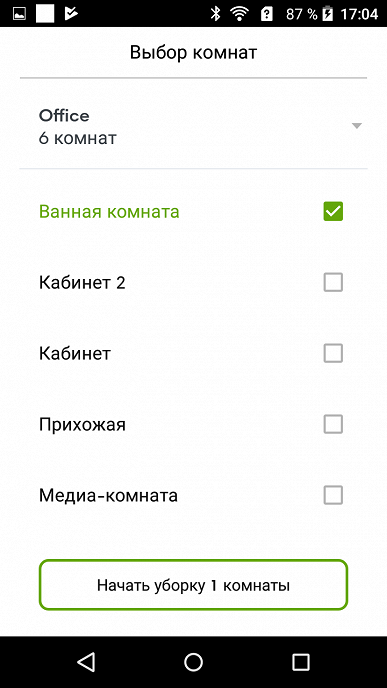
Очень удобно и функционально!
В режиме локальной очистки робот убирает по разворачивающейся и затем сворачивающейся спирали в круге диаметром примерно 1 м.
Дополнительно было испытано устройство ограничения в режиме виртуальной стены. Стена свою задачу выполнила и создала непреодолимый для робота барьер длиной как минимум в 3 м. В режиме кругового ограничителя стена работала так, как и было заявлено: примерно в радиусе 50 см от ограничителя мусор на полу остался.
Во всех режимах шумит робот примерно одинаково. В количественном выражении — это 58 дБА. Для сравнения, уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА. Шумит робот не очень сильно, он тише, чем Roomba 960 и гораздо тише, чем Roomba 980 в режиме высокой мощности. Впрочем, согласно субъективным ощущением мощность вентилятора в i7+ сопоставима с нормальной мощностью вентилятора у 980, то есть в режиме высокой мощности Roomba 980, скорее всего, будет лучше чистить трудные для уборки поверхности, например, ковры с высоким ворсом. Во время опустошения пылесборника i7+ на базе уровень шума достигает 70,5 дБА, что сравнимо с шумом от хорошего обычного пылесоса. Потребление от сети при этом доходит до 1030 Вт при 228 В в сети.
На полную зарядку батареи уходит примерно 1 час и 30 минут. В процессе зарядки пылесоса на базе потребление от электросети доходит до 29 Вт. Если пылесос включен, заряжен и находится на базе в состоянии готовности, то от сети потребляется порядка 1,7 Вт. График потребления от сети во время зарядки:
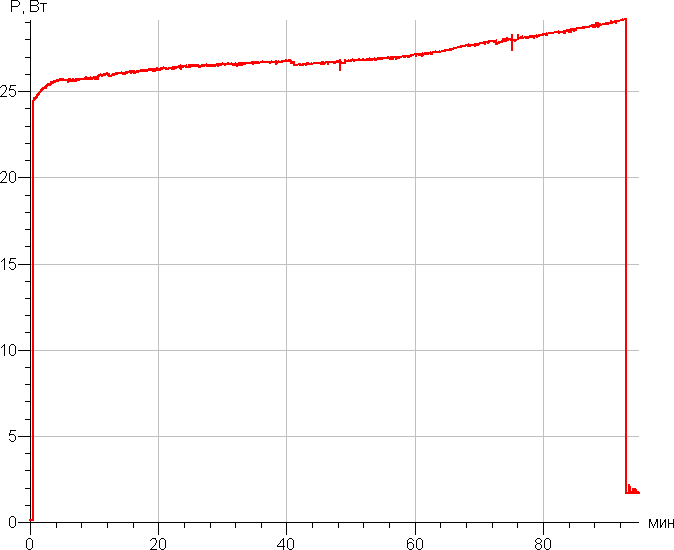
Если пылесос убрать с базы, то потребление упадет до 0,2 Вт — столько потребляет сама база, включенная в сеть. Неудобно то, что через какое-то время нахождения робота на базе все индикаторы гаснут, и непонятно, включена ли база в сеть и заряжается ли робот.
Выводы
Робот-пылесос iRobot Roomba i7+ отличается продвинутой покомнатной навигацией: робот строит карту помещения и даже делит его на комнаты в автоматическом режиме. При этом пользователь может отредактировать карту — внести правки в разделение на комнаты и присвоить комнатам соответствующие имена. После этого робота можно отправить убирать выбранные комнаты непосредственно в данный момент или по расписанию, составленному на неделю. Впрочем не все функции, связанные с картой, реализованы. Например, на карте не показывается, где в данный момент находится робот, нельзя отправить робота выполнить локальную уборку в нужной точке, не получиться создать запретные зоны — придется использовать виртуальную стену. Главным преимуществом данной комплектации является система автоматического опустошения пылесборника, что значительно облегчает обслуживание робота, хотя и может привести к тому, что пользователь будет забывать вовремя чистить этого помощника по дому.
Достоинства
- Хорошее качество уборки вдоль стен, вокруг препятствий и на открытой площади
- Автоматическое опустошение пылесборника
- Система продвинутой покомнатной ориентации
- Функциональное мобильное приложение для контроля и управления
- Режим уборки по расписанию с расширенными настройками
- Легкая очистка основных щеток
- Как минимум однократное возобновление уборки после подзарядки
- Поддержка виртуальных стен и круговых ограничителей
- Датчики переполнения пылесборника и уровня загрязнения
- Высокоэффективный фильтр
- Хорошая комплектация: запасные мешок, фильтр и боковая щеточка, виртуальная стена и комплект щелочных элементов питания к ней
- Голосовое оповещение
- Отличная локализация для России
Недостатки
- Не убирает в темноте
- Неотключаемое звуковое оповещение
- Неотключаемое обязательное опустошение пылесборника после каждой парковки на базе
- На бампере нет накладки, защищающей мебель
Полный текст статьи читайте на iXBT прочитано 34673 раза
