Студенты создали робота, который копирует человека в реальном времени
Студенты и преподаватели кафедры электроники Стелленбошского университета (Южная Африка) разработали гуманоидного робота, который воспроизводит движения человека благодаря системе обратной кинематики. Робот оснащен веб-камерой и продвинутым программным обеспечением, что позволяет ему взаимодействовать с окружающей средой так, будто он управляется непосредственно оператором.
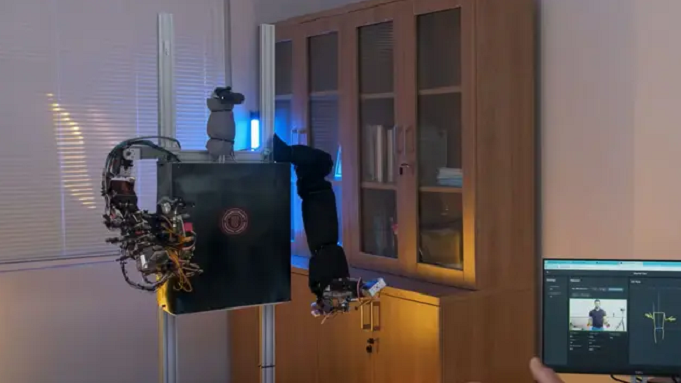
Этот гуманоид оснащен функциональным торсом, рабочей правой рукой и почти завершенной левой рукой. С помощью веб-камеры он отслеживает движения человека и воспроизводит их в реальном времени. Такой подход открывает широкие возможности для дистанционного управления из любой точки мира, что особенно важно для задач, требующих удаленного взаимодействия.
Система обратной кинематики робота позволяет ему точно следовать за движениями оператора, улучшая его способность адаптироваться к различным задачам.Уильям Дакиттпрофессор, один из руководителей проекта
Сейчас команда работает над созданием ног, чтобы робот смог ходить.Приводы для рук и ног и роботизированные захваты тестируют в виртуальной среде с помощью платформы Nvidia IsaacSim.
Робот построен на базе системы EtherCAT, которая используется в сложных инженерных задачах, например, в управлении ускорителями частиц. Это подчеркивает высокую технологическую сложность проекта.
Цель университета — не только развивать робототехнику, но и вовлекать студентов в научные работы, участие в которых помогает им осваивать современные технологии. Гуманоидный робот из Стелленбоша — это не просто студенческий проект, а шаг к реальному применению роботов в повседневной жизни.
Читайте также нашу статью о том, как робот-гуманоид установил мировой рекорд по прыжкам.
