Могу копать: робот-крот будет изучать почву других планет

Умение зарываться в грунт и перемещаться в нем открывает совершенно новый мир, особенно если этот грунт находится на других планетах. Проникновение под верхний слой реголита на такой планете, как Марс, могло бы открыть доступ к миру, где все еще существует жизнь, в то время как на Луне это могло бы привести к обнаружению источника воды или полезных ископаемых.
Вот уже почти 30 лет ученые разрабатывают роботов на основе самой распространенной на Земле живой машины для рытья нор — крота. К сожалению, модели, которые до сих пор летали в космос, по разным причинам терпели неудачу, но это не помешало другим исследовательским группам попытаться усовершенствовать свою версию робота-крота.
В статье исследовательской группы из Гуандунского технологического университета в Китае описываются их усилия и неудачи в подражании одному из самых уникальных землеройных животных. Исследование опубликовано в журнале Advanced Intelligent Systems.
Справедливости ради стоит отметить, что команды, работавшие над предыдущими версиями роботов-кротов, не всегда были виноваты в сбоях. Робот Planetary Undersurface Tool (PLUTO) был установлен на модуле Mars Express и имел ударный механизм, не похожий ни на что, встречающееся в природе. Он долетел до Марса, но не был успешно протестирован из-за того, что посадочный аппарат «Бигль-2», к которому был прикреплен «Марс Экспресс», не смог должным образом развернуть свои солнечные батареи. В результате миссия завершилась, еще не начавшись.
В рамках экспедиции Insight на Марс был запущен еще один зонд с аналогичным оборудованием на борту. Зонд Heat Flow and Physical Properties Package (HP3) был разработан для погружения на глубину 5 м в марсианскую почву с целью измерения тепла, поступающего из недр Марса. К сожалению, он столкнулся с неожиданными почвенными условиями и не смог зарыться в землю, как предполагалось. После многочисленных неудачных попыток эта часть миссии была в конечном счете прекращена.
Рыть норы и подземные ходы в других мирах сложно. Но это не испугало команду из Гуандуна. Их робот должен быть гораздо больше похож на настоящего крота, чем HP3 или PLUTO. В обеих неудачных миссиях использовались различные методы бурения, в то время как новый робот работает лапами, имитируя повадки настоящих кротов.
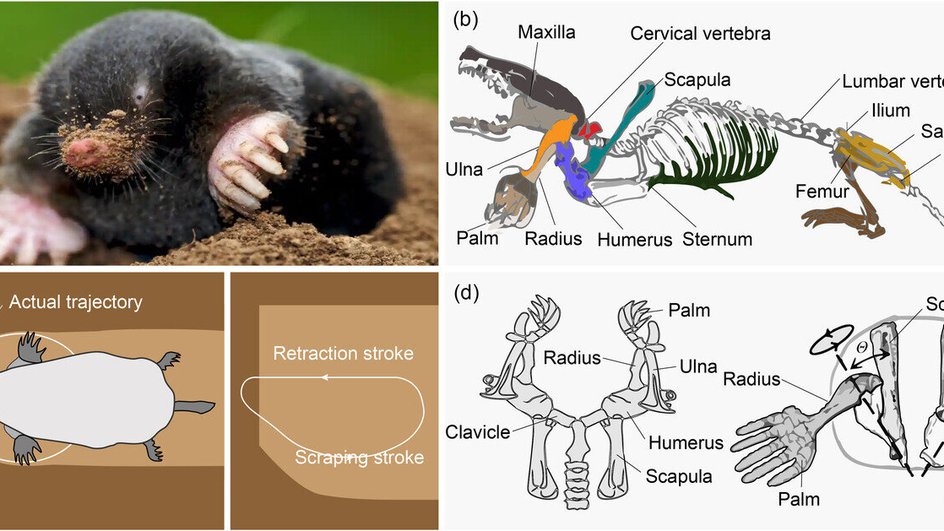
Существует два типа роющих движений, используемых разными видами кротов. Первый из них, который чаще всего изображается в научно-популярных изданиях и средствах массовой информации, заключается в том, что они сгребают землю перед собой, используя свои сильные предплечья. Другой, менее известный метод заключается в том, что они используют свои огромные (по сравнению с размерами тела) зубы, чтобы откусывать куски почвы, а затем лапами проталкивают ее назад под животом.
Мы знаем это благодаря лабораторным исследованиям кинематики поведения кротов, роющих норы. Эти эксперименты показали важность как передних, так и задних лап для перемещения грунта по телу крота и продвижения животного вперед.
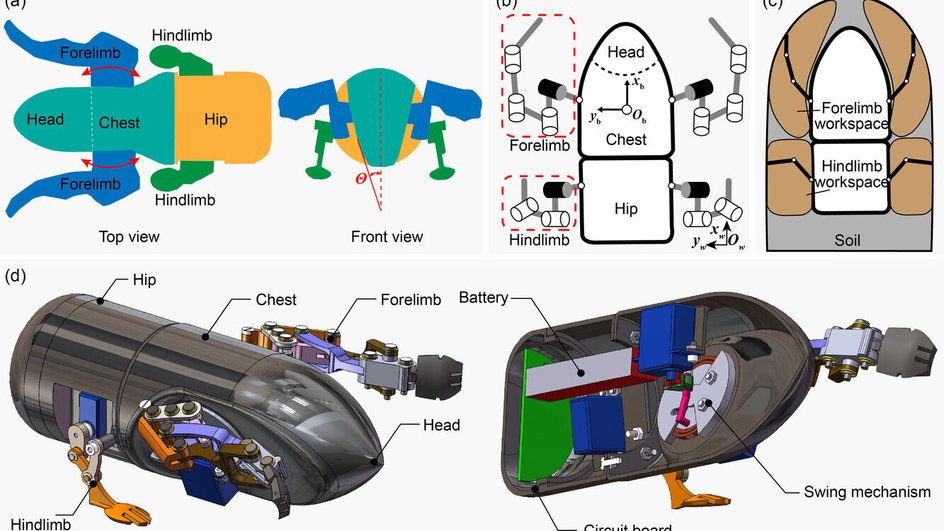
Понимание кинематики — это только первый шаг, и команда из Гуандуна сделала следующий шаг в создании прототипа, который, по общему признанию, выглядит как крот, хотя, возможно, и не такой симпатичный. У него отчетливо выраженные передние и задние лапы, а голова по форме напоминает кротовью, хотя, учитывая отсутствие глаз, она также похожа на гильзу от небольшого артиллерийского снаряда. Продвинутая электроника, системы питания и двигатели скрыты внутри корпуса робота, что позволяет ему прекрасно имитировать форму крота.
Чтобы протестировать прототип, исследователи насыпали слой пластиковых частиц, аналогичных по размеру частицам лунного или марсианского грунта, с которыми придется встретиться роботу во время командировки. Робот успешно зарылся в пластик. Однако у него возникли трудности с продвижением вперед и созданием туннелей, которыми славятся кроты. Это, по-видимому, связано с недостатком координации между передними и задними конечностями, которая была смоделирована в текущей версии прототипа.
Первый прототип — шаг к более совершенной модели, которая когда-нибудь будет использована в другом мире. Будущие исследования будут включать разработку методов, позволяющих роботу зарываться в землю, ползать, бегать и даже плавать, что позволит ему стать по-настоящему многорежимным. Возможно, будет трудно найти другой мир за пределами Земли, которому потребовались бы все эти возможности, но по мере совершенствования биомиметического дизайна ученые ожидают увидеть все больше роботов в форме живых существ.
Ранее мы рассказывали о том, как хамелеон вдохновил изобретателей материалов для самолетов невидимок.
