Z-Wave LED контроллер с энкодером. Z-Uno + MOSFET + Encoder

В комнате где играет ребенок я установил дополнительную подсветку в виде LED ленты. Изначально я планировал, что буду управлять яркостью ленты, это удобно для настройки ночной подсветки. У меня уже был Z-Wave диммер на 220В, поэтому дешевле было докупить диммируемый трансформатор на 12В за 1000р, чем специальный RGBW контроллер от Fibaro за 5500р.
Это решение работает, но есть минусы:
- Задержка при диммировании
- Нельзя установить очень маленький уровень яркости
Спустя год использования, я решил изготовить свой Z-Wave LED контроллер, но с энкодером и в корпусе от диммера, для установки в подрозетник.
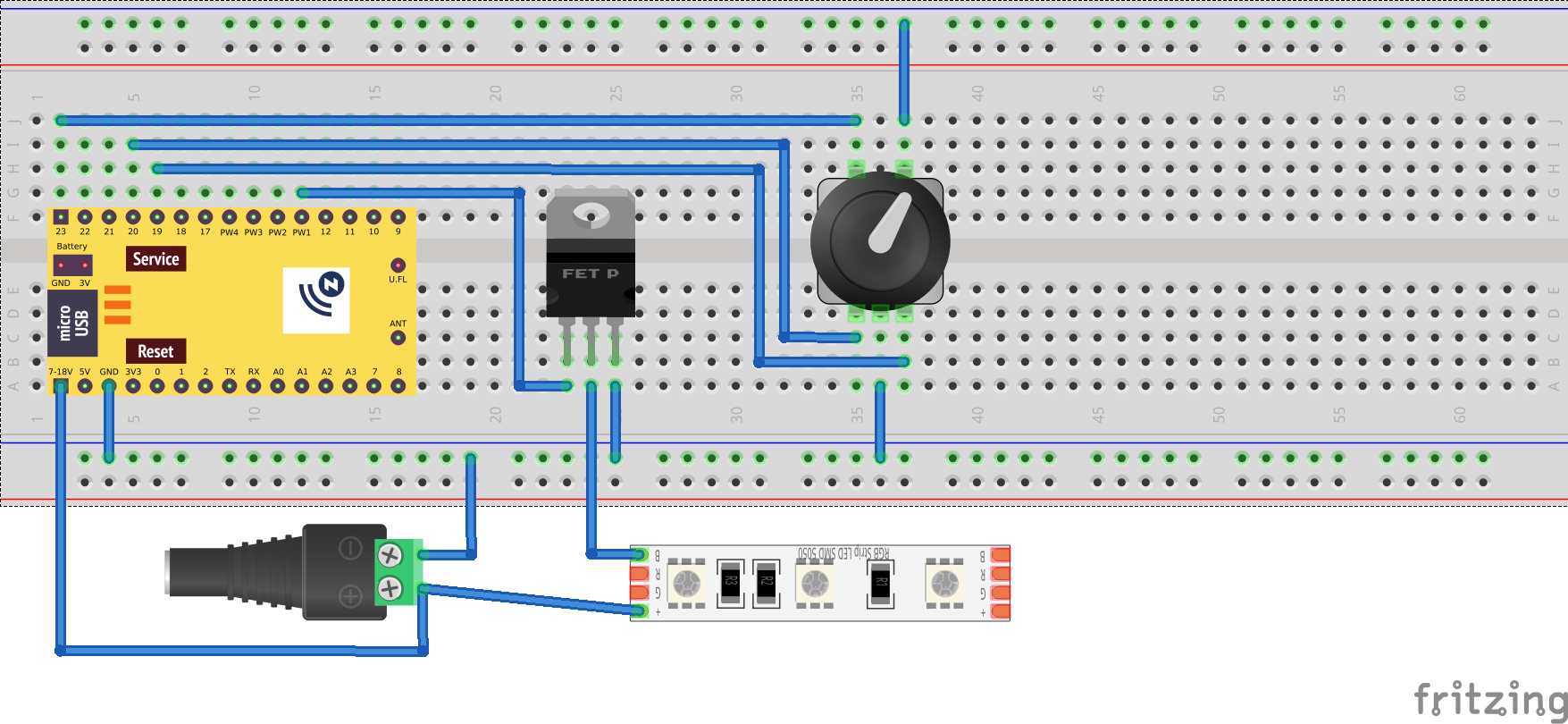
Принципиальная схема устройства элементарна, к Z-Uno напрямую подключается энкодер 3-мя пинами: пин A, пин B и кнопка. Мосфет подключается к PWM пину.
Материалы и цены:
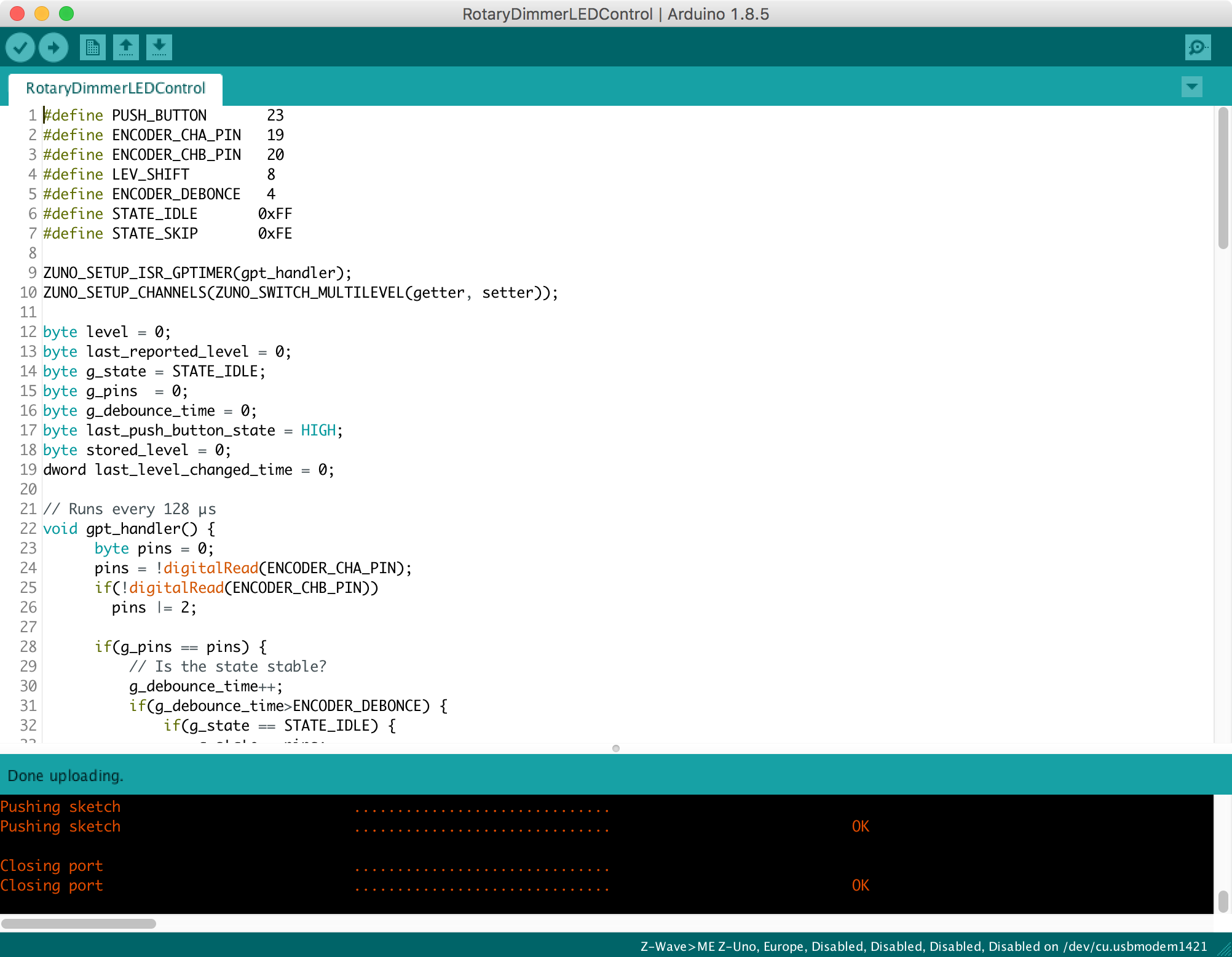
Z-Wave плата Z-Uno программируется в среде Arduino, скетч для обработки сигналов от энкодера и управления мосфетом занимает всего 143 строчки кода с комментариями. Скетч работает следующим образом:
Каждые 128 мкс по прерыванию от таймера проверяем, в какую сторону крутят колесико, от дребезга защищаемся 4-х кратной проверкой состояния. В лупе проверяем нажатие кнопки, при каждом нажатии выключаем ленту или включаем на предыдущий уровень яркости. Яркость можно задавать как с энкодера, так и с телефона или другого Z-Wave выключателя.
#define PUSH_BUTTON 23
#define ENCODER_CHA_PIN 19
#define ENCODER_CHB_PIN 20
#define LEV_SHIFT 8
#define ENCODER_DEBONCE 4
#define STATE_IDLE 0xFF
#define STATE_SKIP 0xFE
ZUNO_SETUP_ISR_GPTIMER(gpt_handler);
ZUNO_SETUP_CHANNELS(ZUNO_SWITCH_MULTILEVEL(getter, setter));
byte level = 0;
byte last_reported_level = 0;
byte g_state = STATE_IDLE;
byte g_pins = 0;
byte g_debounce_time = 0;
byte last_push_button_state = HIGH;
byte stored_level = 0;
dword last_level_changed_time = 0;
// Runs every 128 μs
void gpt_handler() {
byte pins = 0;
pins = !digitalRead(ENCODER_CHA_PIN);
if(!digitalRead(ENCODER_CHB_PIN))
pins |= 2;
if(g_pins == pins) {
// Is the state stable?
g_debounce_time++;
if(g_debounce_time>ENCODER_DEBONCE) {
if(g_state == STATE_IDLE) {
g_state = pins;
}
else if(g_state == STATE_SKIP) {
if(pins == 0)
g_state = 0;
}
else {
if((g_state == 0 && pins == 1) ||
(g_state == 1 && pins == 3) ||
(g_state == 3 && pins == 2) ||
(g_state == 2 && pins == 0) ) {
if (level < 39) {
level++;
}
else if ((level + LEV_SHIFT) <= 255) {
level += LEV_SHIFT;
}
else if ((level + LEV_SHIFT) > 255){
level = 255;
}
}
else
if((g_state == 0 && pins == 2) ||
(g_state == 2 && pins == 3) ||
(g_state == 3 && pins == 1) ||
(g_state == 1 && pins == 0) ) {
if (level <= 39 && level !=0) {
level--;
}
else if (level >= LEV_SHIFT) {
level -= LEV_SHIFT;
}
else if (level < 0) {
level = 0;
}
}
if(g_state != pins)
g_state = STATE_SKIP;
}
g_debounce_time = 0;
}
}
else {
g_debounce_time = 0;
}
g_pins = pins;
}
void setup() {
Serial.begin();
pinMode(PUSH_BUTTON, INPUT_PULLUP);
pinMode(ENCODER_CHA_PIN, INPUT);
pinMode(ENCODER_CHB_PIN, INPUT_PULLUP);
zunoGPTInit(ZUNO_GPT_SCALE1024|ZUNO_GPT_CYCLIC); // 32 MHz/1024 = 31.25 kHz (tick is 32 μs)
zunoGPTSet(4); // 32 μs * 4 = 128 μs
zunoGPTEnable(1);
}
void loop() {
// Do we need to report the level?
if(last_reported_level != level) {
if (level > 0) {
stored_level = level;
}
last_reported_level = level;
analogWrite(PWM1, level);
last_level_changed_time = millis();
Serial.print("Level: ");
Serial.println(level);
}
// Button handler
byte current_push_button_state = digitalRead(PUSH_BUTTON);
if (current_push_button_state != last_push_button_state) {
last_push_button_state = current_push_button_state;
// if button pressed
if (last_push_button_state == LOW) {
// if LED turned ON, turn OFF
if (level > 0) {
analogWrite(PWM1, 0);
level = 0;
}
// Restore last level
else {
analogWrite(PWM1, stored_level);
level = stored_level;
}
}
}
// Send report if 2 seconds level not changed
if (last_level_changed_time && millis() > last_level_changed_time + 2000) {
last_level_changed_time = 0;
zunoSendReport(1);
}
}
void setter(byte value) {
if (value > 99) {
value = 99;
}
level = (long)value * 255 / 99;
analogWrite(PWM1, level);
}
byte getter(void) {
return last_reported_level * 99 / 255;
}
Чтобы изменить яркость ленты с помощью диммера, который я раньше использовал, нужно было удерживать клавишу вверх или вниз, это не очень удобно, трудно подстроить нужный уровень яркости. Да и выглядит диммер, как обычный выключатель, а не как классический светорегулятор с колесиком к которому многие привыкли.

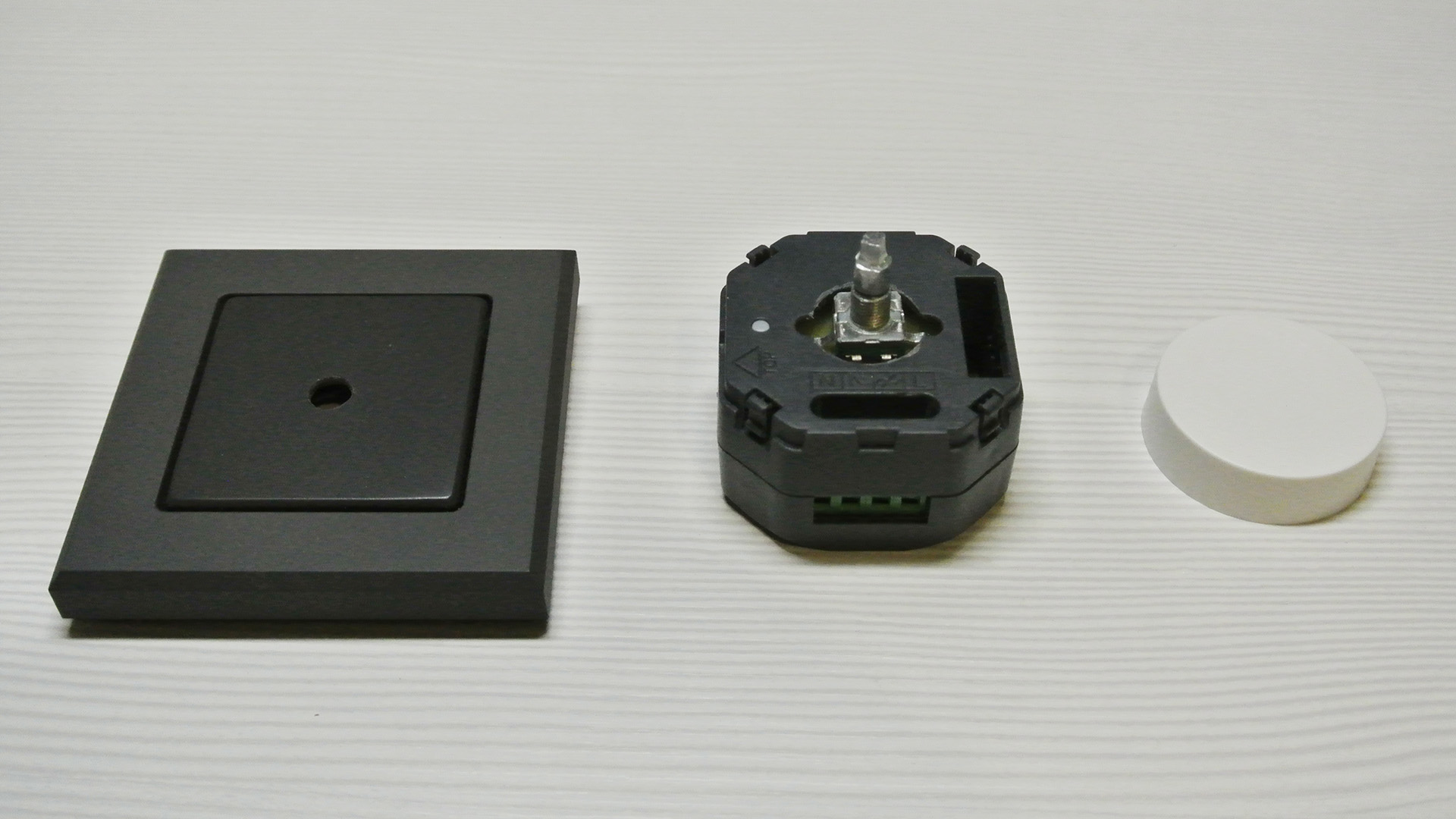
Для нового Z-Wave LED контроллера я модифицировал корпус диммера — просверлил отверстие для энкодера и немного поменял крепление рамки, чтобы использовать рамку от другого выключателя. За дизайн не пинайте, делал из подручных материалов. Можно использовать и готовый корпус от обычного диммера, чтобы выглядело эстетично.
ЛУТ решает! Для изготовления единичного экземпляра платы, лучше ЛУТА я не знаю технологии, поэтому изготовил 2 платы, которые идеально помещаются в корпусе старого диммера. В нижней части находится Z-Uno, мосфет и колодка для подключения питания и ленты, кстати мосфет рассчитан на напряжения до 30В, поэтому ленту можно использовать, как 12В, так и 24В, без радиатора ток лучше не превышать более 5А.
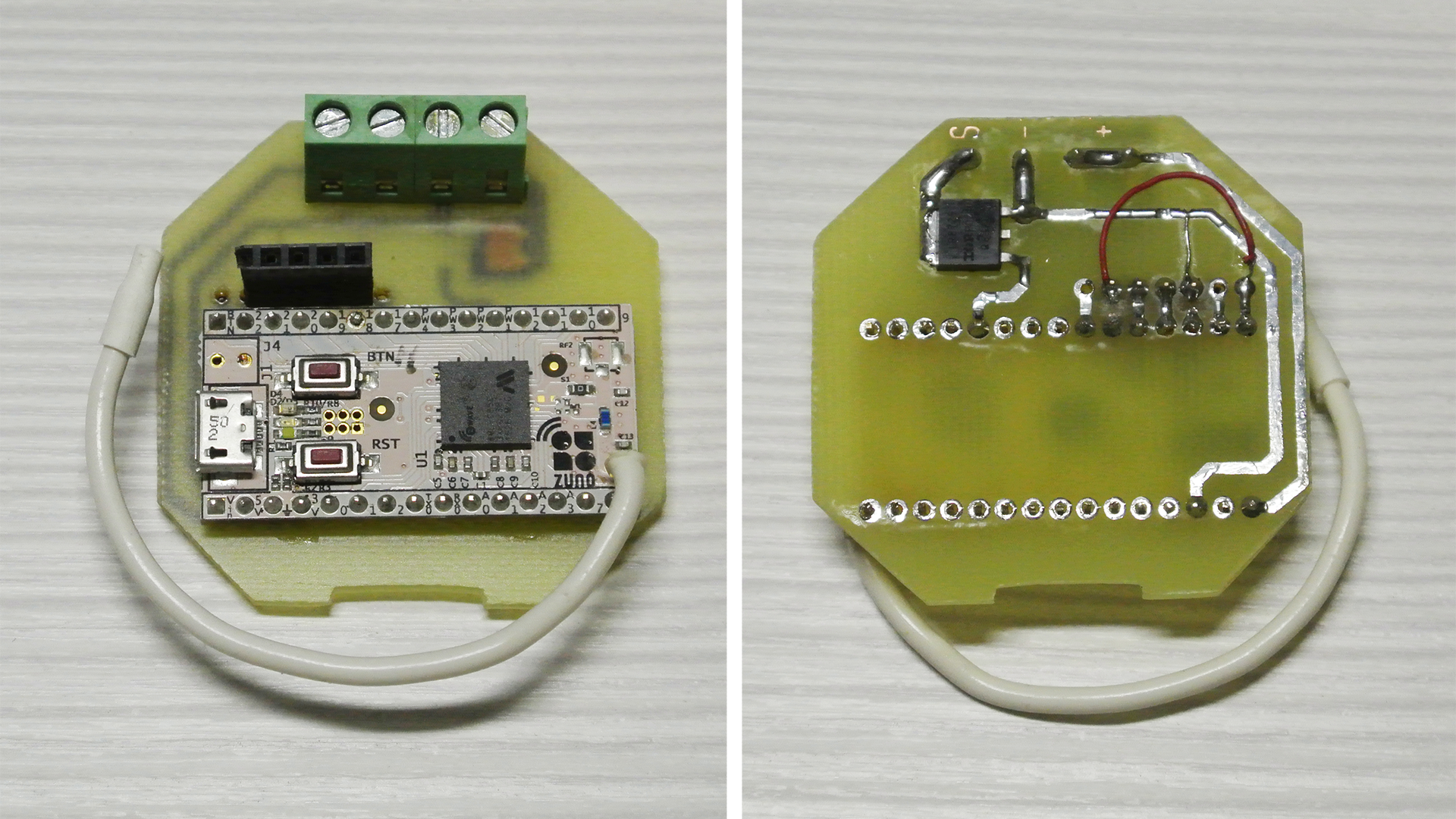
В верхней части расположен только энкодер.
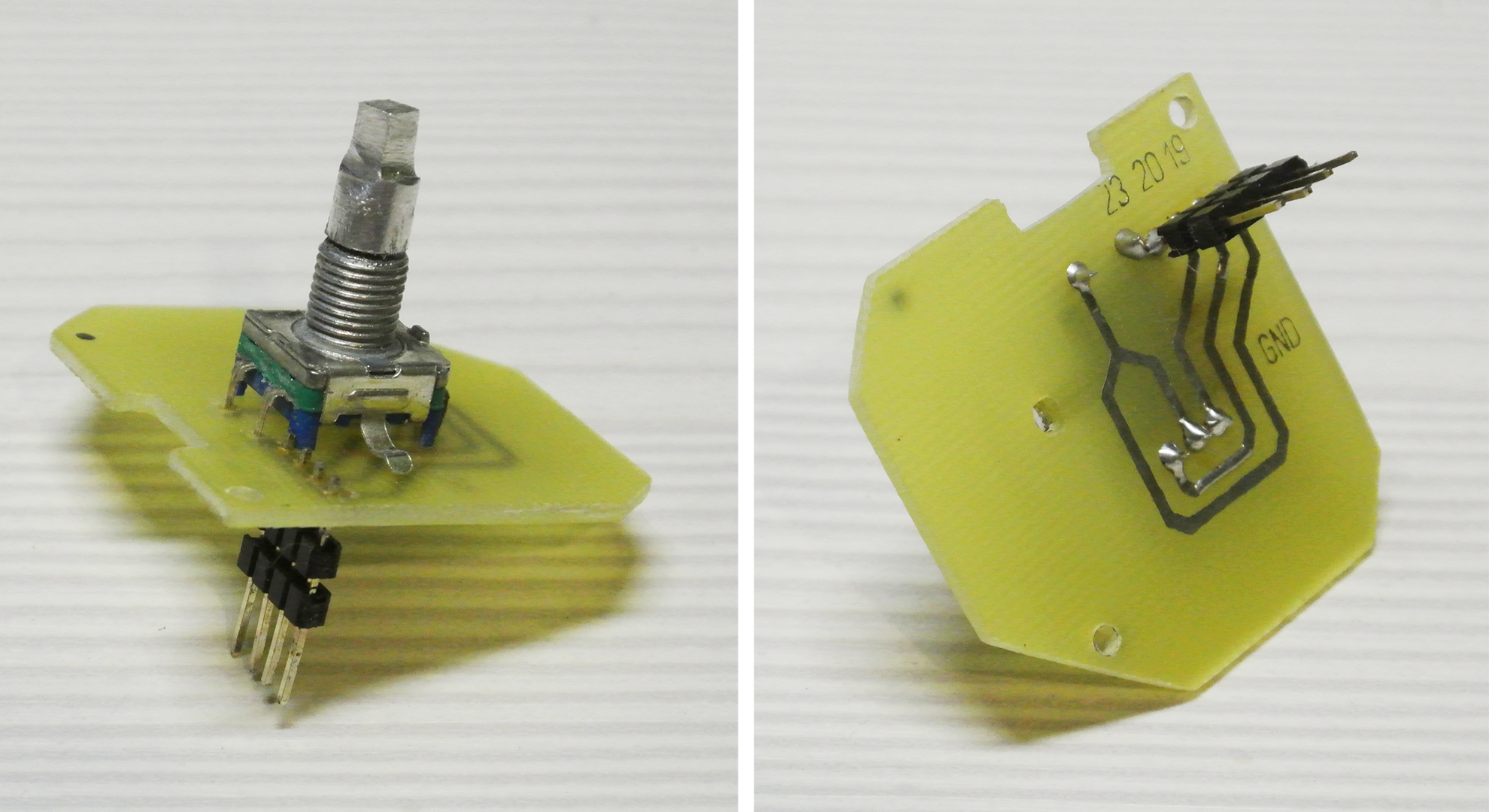
Соединив бутерброд из плат и поместив его в корпус, получился Z-Wave LED контроллер.

На данный момент Z-Wave LED контроллер не установлен в подрозетник и лежит на тумбе под телевизор. Некоторое время еще потестирую работу.

Но уже сейчас удобство управления LED лентой сильно повысилось, при управлении с колесика или прикроватного выключателя яркость изменяется мгновенно. В Z-Wave шкала диммирования находится в диапазоне от 0 до 99, с помощью колесика можно выбрать уровень яркости от 0 до 255. При вращении на 1 деление после 0 светодиоды чуть светят, ночью это никого не разбудит, но поможет не наступать на случайно забытый кубик LEGO на полу.
На изготовление устройства ушло 3 вечера, 1 вечер — написание прошивки, 1 вечер ЛУТ, 1 вечер работа напильником.
