Взгляд изнутри на космический навигационный индикатор «Глобус ИНК»
Советская космическая программа порой удивляла оригинальностью используемых решений. Например, одним из навигационных приборов на борту космических кораблей «Союз» был «Глобус». Своё название он получил за то, что действительно использовал вращающийся глобус для определения положения космического корабля над Землёй.

Космический навигационный индикатор ИНК-2 С «Глобус
Этот навигационный прибор представлял собой электромеханический аналоговый компьютер, в котором была реализована сложная система шестерёнок, кулачков и дифференциалов для вычисления положения космического корабля. Устройство также имело несколько реле, соленоидов и других электрических компонентов.
Официально прибор назывался «космическим навигационным индикатором» с аббревиатурой ИНК, но для простоты предлагаю использовать более привычное название: «Глобус». Удивительно, но его даже можно купить!

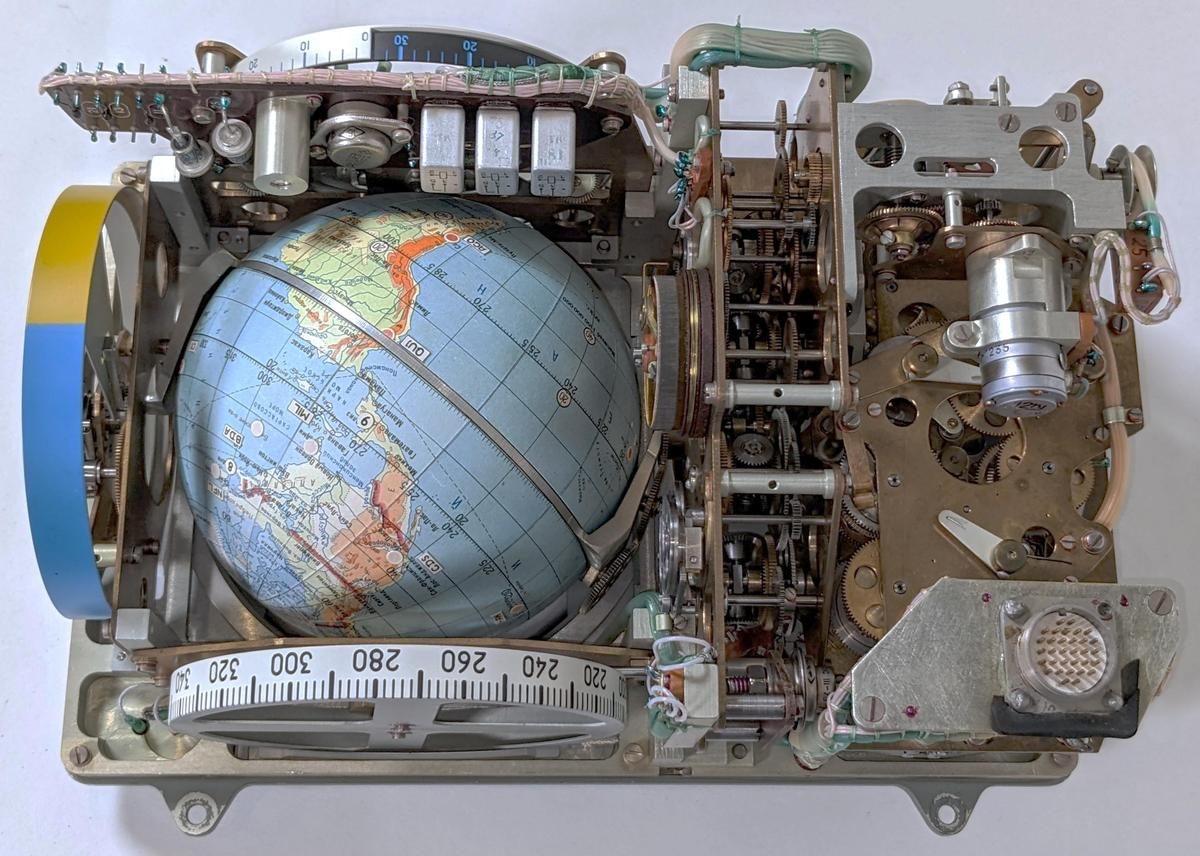
Устройство со снятым корпусом
«Глобус» с глобусом внутри мог вращаться по двум осям, а неподвижный целеуказатель на пластиковом куполе давал понять, где сейчас находится космический корабль. На лицевой панели возле глобуса находились координатные индикаторы, указывавшие широту и долготу.
Они определяются удивительно сложными функциями, генерируемыми проекцией орбиты на земной шар. Функции широты и долготы реализованы в форме металлических кулачков. На фото ниже показан механизм долготы. Каждая функция имеет два кулачка: один кулачок выполняет желаемую функцию, а другой кулачок имеет «противоположную» форму.

Кулачковый механизм для вычисления долготы
А переключатель Свет/Тень в нижней части показывал, когда космический корабль будет освещён солнцем или находиться в тени, что являлось важной информацией на случай выполнения стыковки.


Вид снизу
Приведённая ниже диаграмма показывает, как всё устроено. «Глобус» — это аналоговый компьютер, который представляет значения путём вращения валов на определённую величину. Эти вращения управляют глобусом и циферблатами индикаторов. Поток этих вращательных сигналов показан линиями на диаграмме. Вычисления основаны на сложении, выполняемом десятью дифференциальными шестернями. На схеме каждый символ »⨁» обозначает одну из этих дифференциальных передач. Другие шестерёнки соединяют компоненты, масштабируя сигналы с помощью различных передаточных чисел. Сложные функции реализуются с помощью трёх кулачков специальной формы.

Схема взаимных связей в устройстве
У «Глобуса» был второй режим, указывающий, где приземлится космический корабль, если запустить тормозные двигатели для начала посадки. При нажатии на переключатель, глобус в «Глобусе» вращался до тех пор, пока место посадки не оказывалось под целеуказателем, чтобы космонавты могли оценить пригодность этого места для посадки.
Для этого космонавты настраивали «Глобус», задавая начальную позицию и период обращения космического аппарата. После этого «Глобус» электромеханически отслеживал орбиту. В отличие от американского компьютера наведения «Аполлона», «Глобус» не получал навигационную информацию от инерциального измерительного блока (IMU) или других источников, поэтому он не знал реального положения космического корабля. Всё, что он мог сделать, это отображать прогнозируемое положение.

Зубчатые передачи Глобуса крупным планом

Ещё фото зубчатых передач
Особенности Глобуса
Посмотрев на «Глобус», вы можете задаться вопросом:, а как же вращается эта копия земного шара? Да, мы помним, что по двум осям. Но как насчёт остальных? На самом деле глобус не «плавает» свободно, а крепится к прибору с помощью хитроумного устройства. Экватор глобуса — это цельный кусок металла, который вращается по горизонтальной оси. Второй механизм внутри вращает глобус по оси Север‑Юг. Эти два вращения контролируются концентрическими валами, которые закреплены на устройстве, что позволяет глобусу вращаться в двух направлениях, будучи зафиксированным с двух сторон
На фотографии ниже показана рама, которая держит глобус и управляет им. Пунктирная ось закреплена в устройстве горизонтально, а вращение осуществляется через две шестерни слева. Одна шестерня вращает глобус и раму вокруг пунктирной оси, а другая заставляет глобус вращаться вокруг вертикальной полярной оси (экватор при этом сохраняет неподвижность).

Ось земного шара находится под углом 51,8 °
Угол на картинке выше равен 51,8°. Это неспроста: это наклон стандартной орбиты «Союза». В результате простое вращение глобуса вокруг пунктирной линии заставляет целеуказатель отслеживать стандартную орбиту. Вращение двух половинок глобуса вокруг полюсов даёт различные орбиты 51,8° над поверхностью Земли при вращении Земли.
Почему именно 51,8°? Космодром Байконур, место запуска «Союза», находится на 45,97° северной широты, поэтому 45,97° будет наиболее эффективным наклонением. Однако, чтобы старт космического аппарата не проходил над западным Китаем (куда он мог нечаянно шмякнуться), ракету необходимо наклонить севернее, так и получился угол 51,8°.

Крупный план шестерен, приводящих в движение две половины земного шара вокруг полярной оси, оставляя экватор неподвижным
Особенностью такой конструкции стала фиксация наклонения орбиты углом наклона механизма глобуса. Для разных орбит приходилось строить разные устройства «Глобус». Кроме того, прибор способен работать только с круговыми орбитами, что делает его бесполезным при смене орбит. Например, при стыковке. Это крайне неудобно, из‑за чего некоторые космонавты даже просили убрать «Глобус» с панели управления. Но его никуда не убирали вплоть до 2002 года, когда в корабле «Союз‑ТМА» появился компьютерный дисплей.

Так выглядел пришедший на смену «Глобусу» компьютерный дисплей системы индикации «Нептун‑МЭ» космического корабля «Союз‑ТМА». Консоли «Союз» намного проще, чем консоли «Аполлон» или «Спейс Шаттл», и построены по совершенно другим принципам.
Кстати, сам земной шар слабо детализирован из‑за его небольшого размера. На нём видны такие особенности местности, как горы, озера и реки. С помощью этих данных космонавты могли сопоставить своё положение с географическими объектами, которые они могли видеть на Земле. По большей части карта не имела политических границ, за исключением толстых красных и фиолетовых линий. Эта линия показывала границы СССР, а также границы между коммунистическими и некоммунистическими странами, что было важно для выбора места посадки. На глобусе были и 8 пронумерованных кругов, обозначавших радиостанции для связи с космическим кораблём, что позволяло космонавтам определять, с какими наземными станциями можно связаться.

Глобус и пронумерованные радиостанции
А ещё вы обратили внимание на английские символьные обозначения? На глобусе видны надписи GDS (Goldstone), MIL (Merritt Island) , BDA (Бермуды) и NFL (Ньюфаундленд) — это станции НАСА. Получается, что конкретно наш «Глобус» был построен для испытательного проекта «Аполлон-Союз» — миссии 1975 года, когда космический корабль «Аполлон» состыковался с капсулой «Союз».
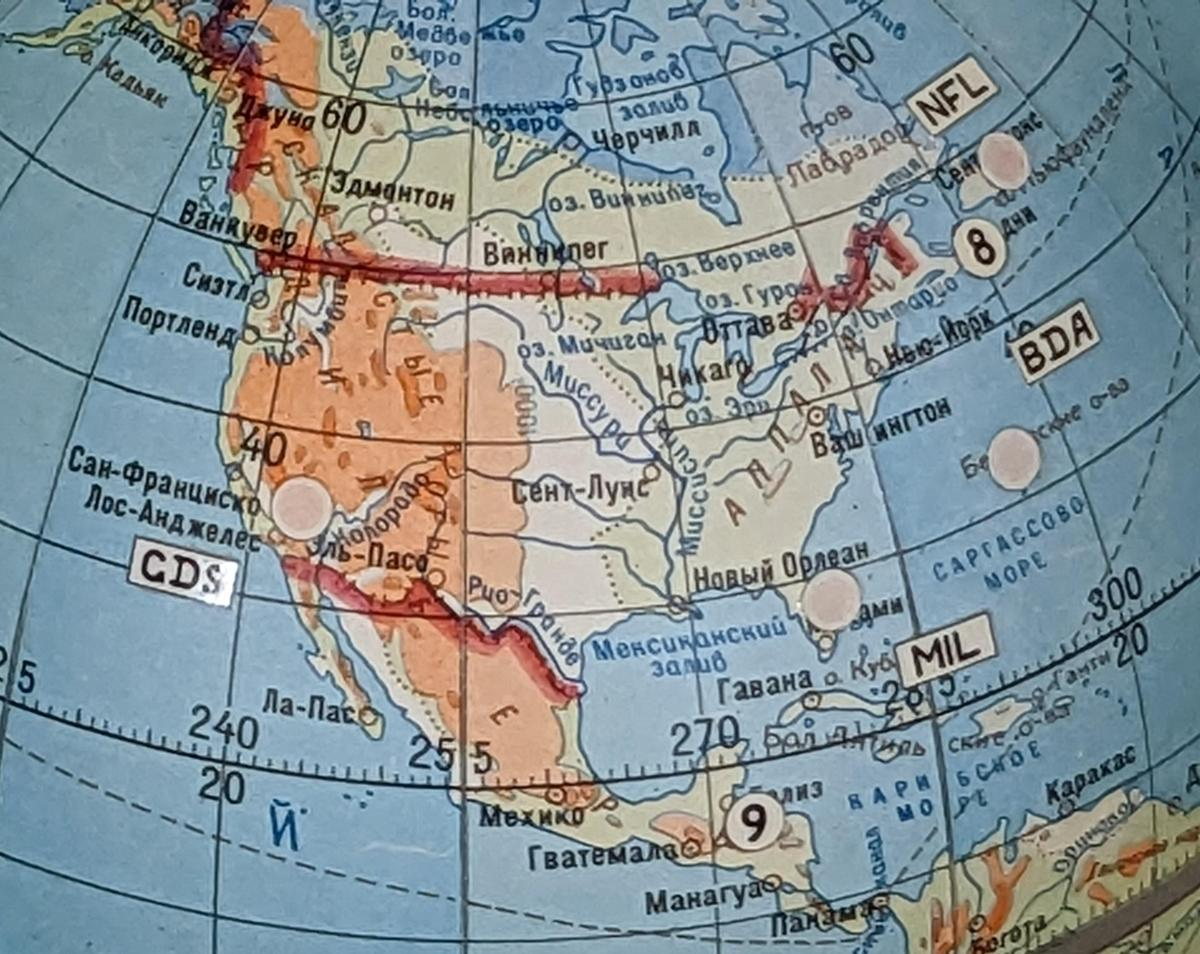
Те самые обозначения. Граница США отмечена красным
Дифференциальный механизм
В «Глобусе» используются многочисленные дифференциальные шестерни для сложения и вычитания оборотов. На фото ниже показаны два набора шестерней дифференциала, расположенные рядом.

Два дифференциала
Но как сгенерировать три переменные скорости вращения из фиксированного ввода? Решением является специальный кулачок, имеющий форму конуса со спиралевидным поперечным сечением. На кулачке движутся три толкателя, поэтому при вращении кулачка толкатель выталкивается наружу и вращается на своём валу. Если толкатель находится рядом с узкой частью кулачка, он перемещается на небольшое расстояние и имеет небольшой поворот. Но если толкатель находится рядом с широкой частью кулачка, он перемещается на большее расстояние и имеет большее вращение. Таким образом, перемещая толкатель в определённую точку на кулачке, выбирают скорость вращения толкателя.
Ниже показан механизм управления орбитальной скоростью. У конуса три последователя, но с этого ракурса видны только два. Шестерни «трансмиссии» перемещаются вперёд и назад с помощью внешней ручки, чтобы выбрать, какой толкатель регулируется внутренней ручкой.

Схема, показывающая механизм управления орбитальной скоростью. У конуса три последователя, но с этого ракурса видны только два. Шестерни «трансмиссии» перемещаются вперёд и назад с помощью внешней ручки, чтобы выбрать, какой толкатель регулируется внутренней ручкой
Очевидно, что кулачок не может вращаться по спирали бесконечно. Вместо этого в конце одного оборота его поперечное сечение резко уменьшается до начального диаметра, и кулачок возвращается в исходное положение. Ведомый диск соединён с дифференциальной передачей через проскальзывающую муфту и храповик, и когда ведомый элемент защёлкивается, храповик удерживает приводной вал в неподвижном состоянии. Затем приводной вал продолжает вращение, а догоняющий механизм снова начинает циклическое движение. Таким образом, на выходе получается относительно плавное вращение со скоростью, зависящей от положения последователя.
На фотографии ниже показан один из дифференциальных механизмов. В центре зубчатый узел (красный прямоугольник), который состоит из двух конических зубчатых передач, свободно вращающихся на вертикальном валу. Зубчатая передача крепится к горизонтальному валу, который называется карданным. Справа этот вал прикреплён к цилиндрической зубчатой передаче. Все они вращаются вместе как единое целое.
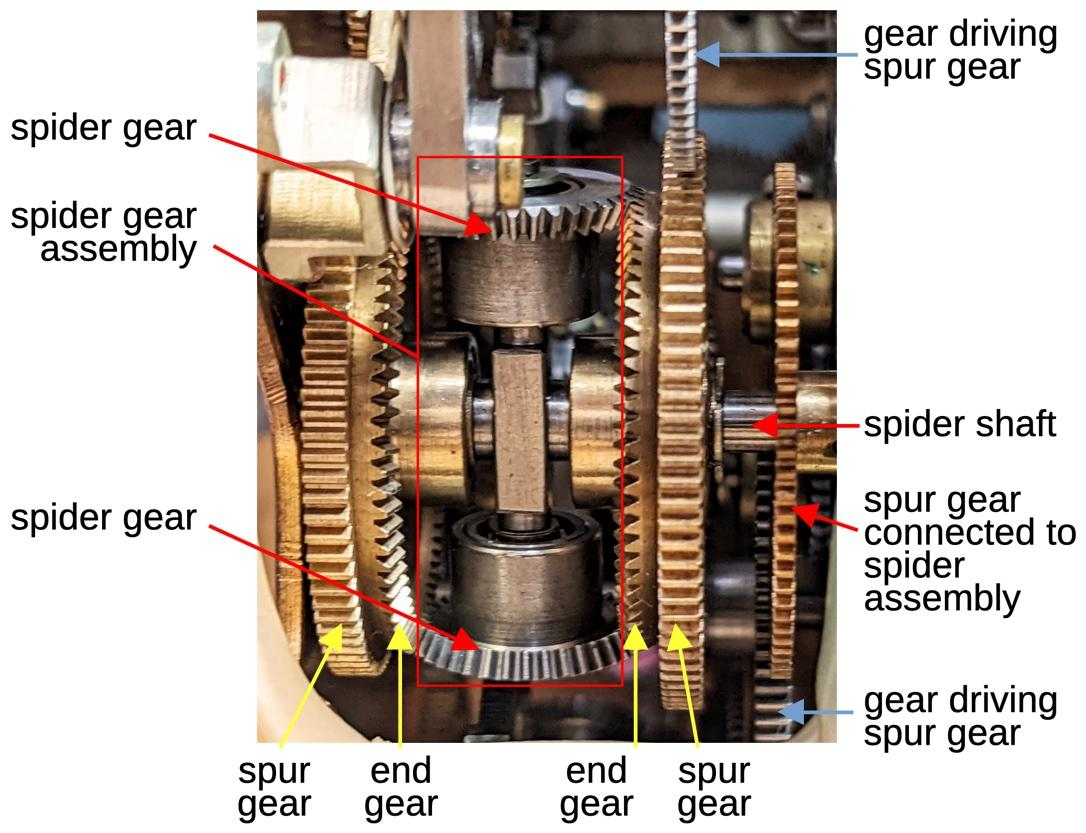
Слева и справа находятся две зубчатые передачи (выделены жёлтым). Осевое ЗК дифференциала представляет собой коническую зубчатую передачу с зубьями, расположенными под углом, для зацепления с центральным дифференциалом. Каждое осевое ЗК дифференциала сцеплено с цилиндрической зубчатой передачей, и они свободно вращаются на горизонтальном карданном валу. Всего имеется три цилиндрические зубчатые передачи: две соединены с осевым ЗК дифференциала и одна соединена с крестовиной карданного вала.
Вот из этого видео можно узнать чуть больше:
Элементы управления и лицевая панель
Посадочный механизм
Как вы уже читали, «Глобус» может показать, где приземлился бы космический корабль, если бы вы начали вход в атмосферу сейчас, с точностью до 150 км. Это вычисляется путём проецирования текущей орбиты вперёд на частичную орбиту, в зависимости от того, сколько времени потребуется для приземления. Космонавт указывает это значение «посадочным углом», который указывает на эту часть орбиты как на угол.

Контроль угла посадки
Чтобы получить положение приземления, двигатель вращает глобус до тех пор, пока он не остановится после поворота на заданный угол. Для этого ручка регулировки на панели поворачивает регулировочный вал, который перемещает концевой выключатель на нужный угол с помощью червячной передачи. Проводка оборачивается вокруг колеса, поэтому остаётся под контролем во время этого движения. Когда приводной двигатель активируется, он одновременно вращает шар и поворотный рычаг.
Поскольку двигатель останавливается, когда поворотный рычаг касается концевого выключателя угла, земной шар поворачивается на желаемый угол. Фиксированный концевой выключатель используется для возврата положения земного шара в его обычное орбитальное положение.

Механизм функции угла посадки
На «Глобусе» также был счётчик витков, угла посадки.
Движение по орбите «Союза» занимает примерно 90 минут, время меняется в зависимости от высоты. На «Глобусе» есть ручка регулировки (внизу) для настройки орбитального периода в минутах, десятых долях минут и сотых долях минут. Внешняя ручка имеет три положения и указывает на цифру, которая изменяется при повороте внутренней ручки. Механизм обеспечивает регулировку ±5 минут от номинального периода в 91,85 минуты.

Элемент управления для регулировки орбитального периода
Режим места посадки активируется трёхпозиционным поворотным переключателем. Первая позиция «МП» (место посадки) выбирает место посадки, вторая позиция «З» (Земля) показывает положение над Землёй, а третья позиция «Откл.» отменяет угол посадки. вращения и выключает механизм.

Переключатель для выбора режима угла посадки
Начинка
Хотя «Глобус» преимущественно механический, он имеет электронную плату с четырьмя реле и транзистором, а также резисторами и диодами. Большинство этих реле управляют механизмом определения местоположения посадки, двигая двигатель вперёд‑назад и останавливаясь на концевом выключателе. Диоды обратноходовые, два диода последовательно подключены к каждой катушке реле для устранения индуктивного выброса, когда катушка отключена.

Электронная плата
Потенциометр на 360° преобразует орбитальное положение космического корабля в напряжение. «Глобус» подаёт этот сигнал напряжения другим устройствам на космическом корабле. Транзистор на плате усиливает это напряжение (но это не точно).

Потенциометр и механизм, отвечающий за определение долготы
На фото ниже вы можете увидеть несколько кабелей, а спереди справа — электронную плату. У «Глобуса» удивительно много проводов для устройства, которое в основном механическое. Печально, что все провода к внешнему разъёму (вверху слева) были перерезаны. Возможно, это было частью вывода блока из эксплуатации. Однако один из винтов на корпусе закрыт сургучной пломбой со знаками отличия, и эта сургучная пломба осталась целой. Это указывает на то, что устройство было официально повторно опломбировано после перерезания проводов, что не имеет смысла для списанного устройства.

Глобус, вид сзади и снизу. Чёрные провода (слева, у цифры 18) перерезаны
Устройство приводится в движение двумя соленоидами с храповым механизмом: одним для орбитального вращения и одним для вращения Земли. Эти соленоиды принимают 27-вольтовые импульсы с частотой 1 герц. Каждый импульс заставляет соленоид продвигать шестерню на один зуб; собачка удерживает шестерню от соскальзывания назад. Эти небольшие вращения приводят в движение шестерни по всему устройству и приводят к крошечному движению глобуса.

Один из соленоидов привода. Барабаны с указателем орбитального времени находятся внизу

Другой соленоид
Заключение
«Глобус ИНК» — замечательный механизм, аналоговый компьютер, который вычисляет орбиты с помощью сложной системы шестерён, кулачков и дифференциалов. Он предоставил астронавтам полноцветное отображение положения космического корабля с высоким разрешением, намного превосходящее то, что мог бы предложить космический компьютер в 1960-х годах.
Недостаток «Глобуса» в том, что его функциональность ограничена. Но для задач того времени этого было достаточно.
Спасибо за внимание!
Источники
Что ещё интересного есть в блоге Cloud4Y
→ Информационная безопасность и глупость: необычные примеры
→ NAS за шапку сухарей
→ Взлом Hyundai Tucson, часть 1, часть 2
→ Столетний язык программирования — какой он
→ 50 самых интересных клавиатур из частной коллекции
