Управление температурой быстрых термических процессов
Данная статья является продолжением темы быстрых термических процессов, которой я занимаюсь в рамках диссертационной работы. Логично, что после задачи идентификации, которая рассматривалась в предыдущем топике, стоит постараться решить задачу управления процессами такого рода.Установка представляет собой высокотемпературную водоохлаждаемую камеру, в которой происходит осаждение элементов из металлоорганических соединений на сапфировые подложки. Рост производится при температурах от 550 до 1000 градусов Цельсия и атмосферном давлении. Полученные таким образом полупроводники обладают надежностью и высоким КПД, что позволяет использовать их в космических технологиях.
Вся установка управляется компьютером, на котором стоит Windows с TwinCAT. Все основные электротехнические узлы производства фирмы Beckhoff, посему установка находится под управлением вышеуказанного программного обеспечения. Кстати, в разгар летней жары оказалось, что их электроника весьма чувствительна к комнатной температуре, и сигнал начинает сильно шуметь.
 Одним из основных элементов управляющей цепи является высокочастотный генератор с индуктивным элементом.
Одним из основных элементов управляющей цепи является высокочастотный генератор с индуктивным элементом.

Внутри эта трубка полая и покрыта серебром, чтобы не окислялась при пропускании охлаждающей жидкости. Мы передаем управляющий сигнал непосредственно генератору включенному в цепь индуктора. Хитрым способом генератор подстраивает параметры цепи индуктора и частоту подачи сигнала, минимизируя ток в индуктивном элементе, максимизируя токи Фуко на стороне приемника.
Приемником является графитовый подложкодержатель, в котором расположены три лунки для сапфировых подложек для выращивания полупроводников. Сапфир необходим для того, чтобы выращенный материал принял подобную ему структуру кристаллической решетки. Это позволяет получить материал с необходимой структурой, но если рост происходит при изменяющейся температуре, то структура получается неравномерной, что приводит к сокращению срока службы. Так же при значительных колебаниях температуры происходит разрушение графита. На фотографии четко видны следы длительной эксплуатации подложкодержателя.

Температура измеряется оптическим пирометром с шагом в 1 градус, шум аналого-цифрового преобразователя составляет 0.2 градуса. Соответственно, было сформулировано задание: обеспечение максимально возможной точности поддержания температуры, для данной установки, в установившемся режиме с модулем амплитуды отклонения равным 1 градусу. Вторичной задачей было минимизация времени переходного процесса и перерегулирования при выходе на рабочую температуру.
Для начала было получено математическое описание температурной модели реактора, после чего идентифицированы ее параметры. Дифференциальное уравнение, описывающее процесс в точке измерения выглядит следующим образом:

где T — измеряемая температура, P — управляющая мощность индуктора, B — коэффициент при управляющем воздействие, A1 — коэффициент характеризующий лучистое распространение энергии, A2 — коэффициент характеризующий конвекцию, С — скорость нагрева точки измерения от окружающей среды. В ходе экспериментов выявилось, что коэффициент A1 зависит в основном от типа материала, из которого изготовлен приемник (подложкодержатель), A2 растет с увеличением температуры и скорости продувки химических реагентов через лайнер (кварцевый кожух, который локализует зону химической реакции). Получается, для качественного результата идентификации параметров A1 и C нужно измерять температуру газа на входе в реактор и на выходе из него, а так же, не помешало бы, знать температуру лайнера. Но это пока остается в планах на будущее.
Далее были получены две математические модели для крайних режимов. Параметры, идентифицированные методом наименьших квадратов в прошлом посте, пришлось подкорректировать методом минимизации ошибки предсказания, получилось два набора параметров для минимальной и максимальной температур рабочего диапазона.
Для 550 градусов: 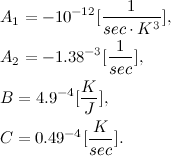 Для 1000 градусов:
Для 1000 градусов: 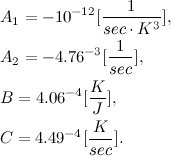 Все изменения значений параметров имеют физическую природу. В частности, при увеличении температуры графита меняются его электромагнитные характеристики. Мы видим снижение эффективности преобразования электромагнитной энергии в тепло на 17%. Оставшиеся коэффициенты сами по себе зависят от температуры.
Все изменения значений параметров имеют физическую природу. В частности, при увеличении температуры графита меняются его электромагнитные характеристики. Мы видим снижение эффективности преобразования электромагнитной энергии в тепло на 17%. Оставшиеся коэффициенты сами по себе зависят от температуры.
К полученной модели добавили ПИ регулятор и получили замкнутую систему, для данного случая имеется доказательство устойчивости, которое подробно изложено в тексте диссертации.
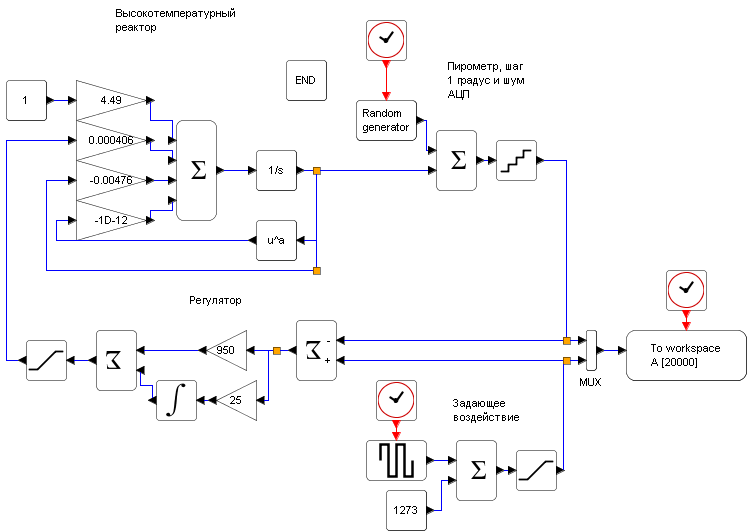
Система управления обкатывалась при крайних значениях температуры рабочего диапазона, чтобы убедиться в работоспособности регулятора при значительном изменении параметров объекта.
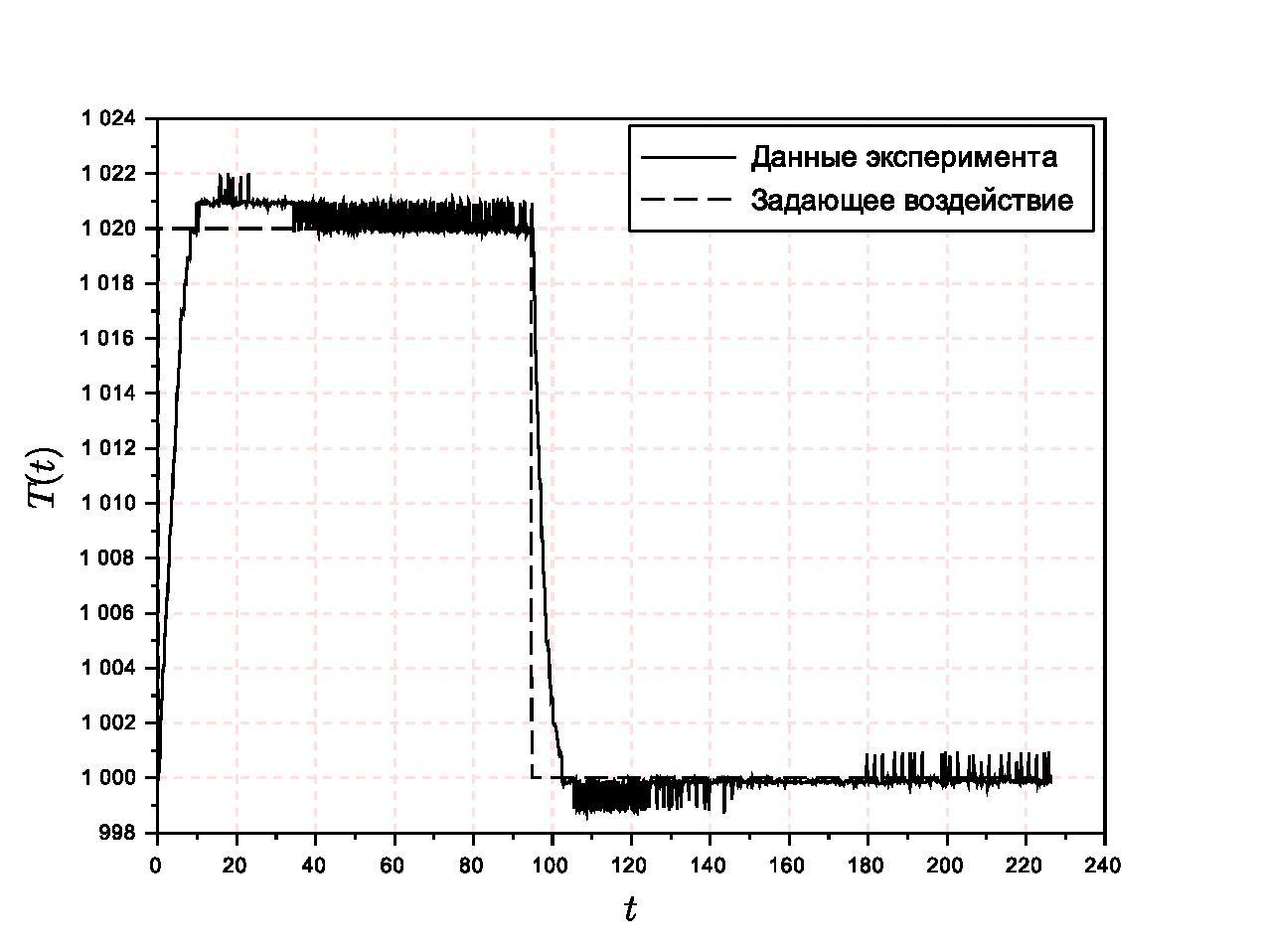
Далее приведены некоторые результаты работы для 550 и 1000 градусов Цельсия. В качестве управления подавалось ступенчатое воздействие с амплитудой 20 градусов.
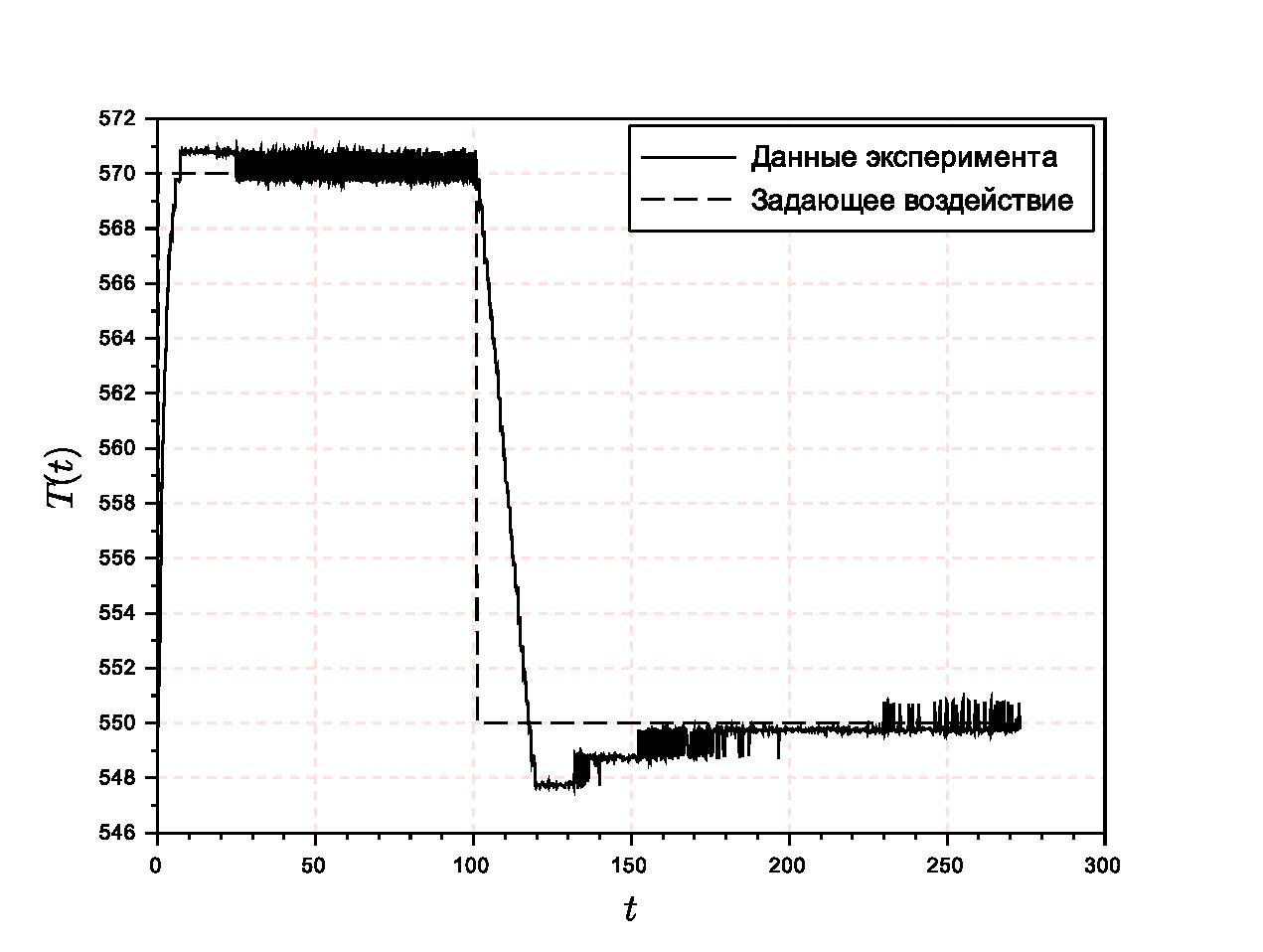
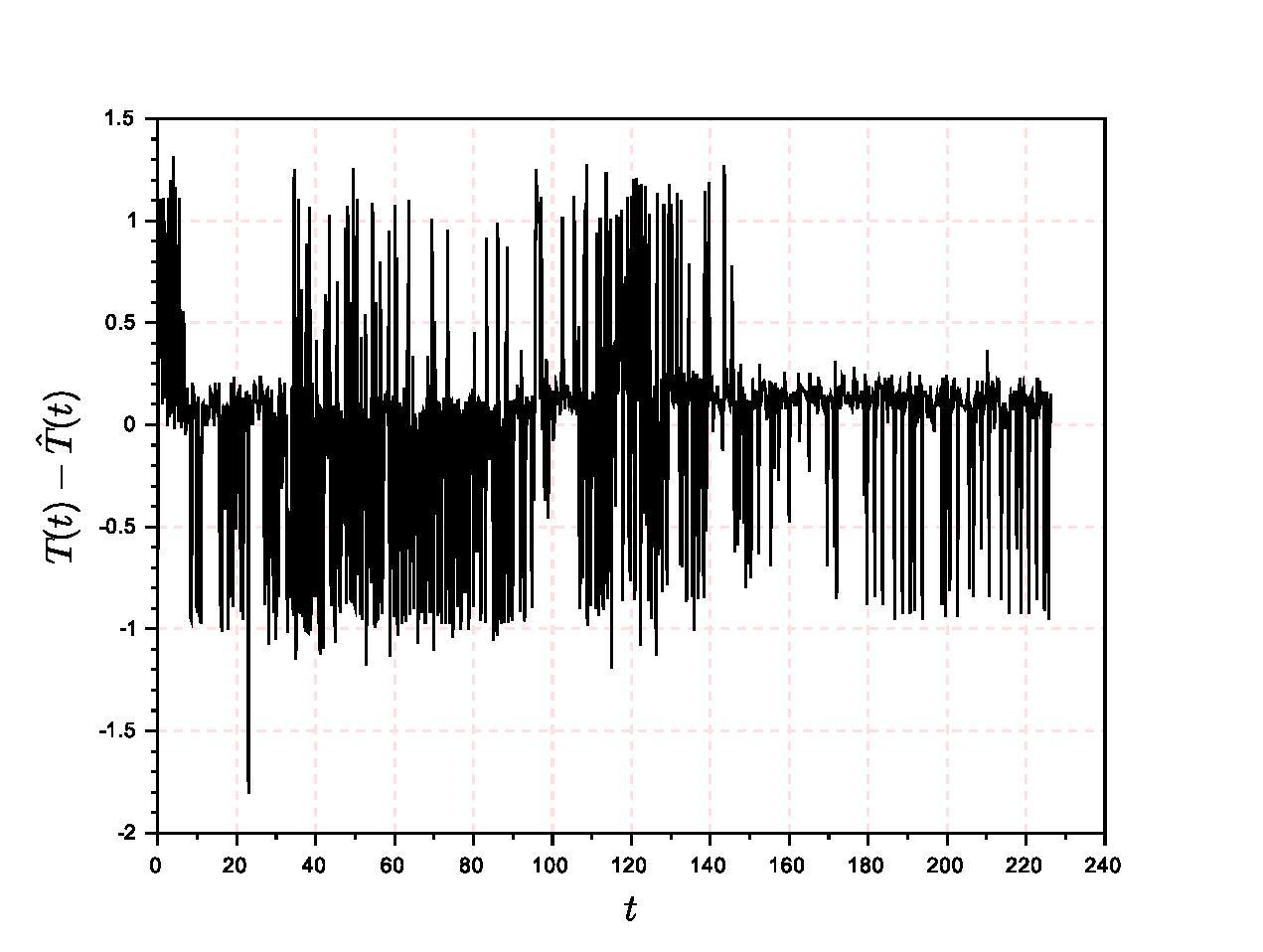
Стоит отметить, что пропорциональный коэффициент регулятора завышен, так как видно перерегулирование в 2 градуса в режиме удержания 550 градусов. Математическое моделирование и экспериментальные данные имеют следующий график невязки для режима 1000 градусов. Выглядит весьма неплохо, хотя трудно говорить о качестве модели замкнутой системы.
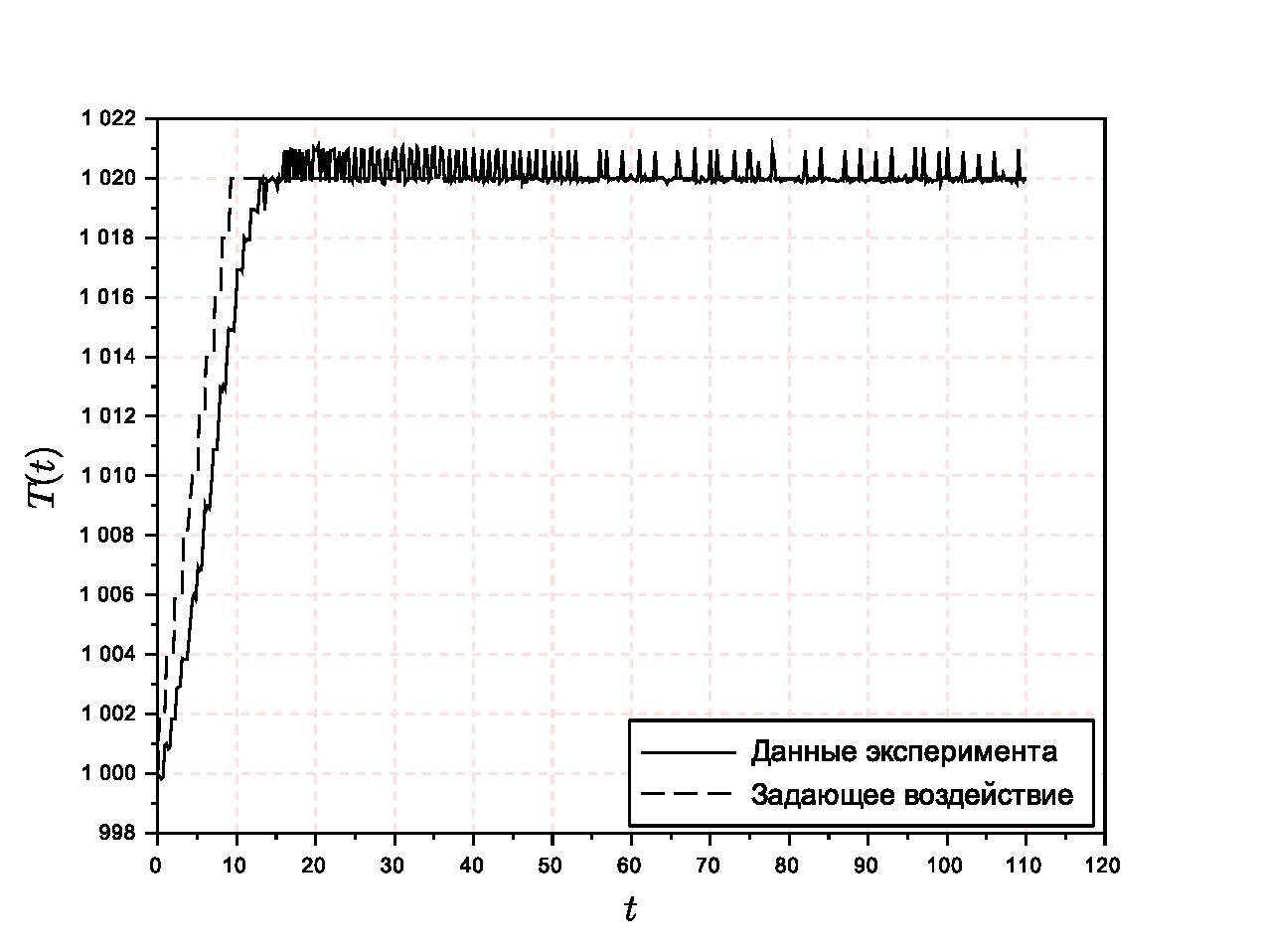
В реальной системе задание температуры происходит плавно при линейном возрастании задающего воздействия, при этом скорость роста должна быть ограничена, так как высокую скорость нагрева обеспечивают большие токи, что приводит к быстрой деградации графита. Далее приводится график слежения за линейно возрастающим, со скоростью 2 градуса в секунду, задающим воздействием. Среднее установившееся значение ошибки слежения равно 4 градусам. Среднеквадратичное отклонение в установившемся режиме не превышает 1 градуса, поставленное задание можно считать выполненным.
В принципе, здесь освещена основная экспериментальная часть моей работы. Снова приношу благодарность моим коллегам, в частности научному руководителю Arastas, который помог довести это дело до конца, и Заварину Евгению за проведение большого количества опытов и сбора необходимой информации.
