Универсальная машина для проведения испытаний своими руками ч.1
В продолжение тем (первая, вторая) про испытательные машины, хочу собрать бюджетный вариант машины консольного типа, на небольшую нагрузку (20 кг), для испытания различных материалов…
После написания предыдущих двух статей на эту тему, мне были заданны вопросы, связанные с модернизацией и разработкой. Это подтолкнуло меня к написанию статьи. Она будет состоять из двух частей — в этой я расскажу о механической части, а вторая будет посвящена электронике, программному обеспечению и обработке полученных данных.
Кинематическую схему решил взять консольного типа, так как она проще в реализации и меньше по габаритам (в сравнении с двухколонной машиной) при одних и тех же закладываемых характеристиках, но конструктивно она чуть слабее.
Я заложил следующие основные характеристики для своей машины: максимальная нагрузочная способность 20 кг. или 200 Н., а максимальный рабочий ход 600 мм.
Приступив к конструированию, определился с основными материалами изготовления деталей машины. Цилиндрические направляющие 20 диаметра и каретки к ним решил купить, не изобретая велосипеда. В качестве перемещающего механизма взял строительную шпильку и гайку с резьбой М20 шагом 2,5 мм. Соединительные плиты силовой рамы, включая основание машины, было решено изготовить из фанеры толщиной 20 мм.
Небольшое отступление для тех, кто начал смеяться: данный проект планируется быть, достаточно бюджетным, и нужен для отработки схемы использования выбранной электроники и разработки программы для управления и обработки данных на персональном компьютере.
Использование в конструкции трапециидального винта или ШВП винта, а также в место фанеры — дюраль или сталь, значительно увеличит стоимость машины, а я все же ее не для продажи делаю, а для повторения сего проекта, теми, кто нуждается в подобном силоизмерительном агрегате. Кто, какую кинематическую схему будет использовать и из, каких комплектующих дело лично каждого.
Накидал проект в Компас-е, только основные детали, с технологией изготовления которых сразу определился. В виду того, что у меня есть фрезерный станок с ЧПУ почти все компоненты машины изготовленные из фанеры решил обработать на нем.
Разложил все плоские детали в двумерной проекции, сохранил их в векторном формате (*.dxf). Через постпроцессор в CAM программе перевел рисунки в G-code. Станок вырезал все детали за одну установку заготовки, так как размеры его рабочего поля позволяют. Обработав углы наждачной бумагой, все сопрягаемые детали подошли очень хорошо друг к другу.
Направляющие и шпилька были обработаны на токарном станке. Как мы не старались сделать шпильку без биения, она все равно осталась кривой.
После предварительной сборки силовой рамы, стало видно что требуется усилить крепление цилиндрических направляющих к верхней и нижней плитам. Для этого потребовались дополнительные опоры, но покупать их накладно, а вот изготовить их из пластика на 3D принтере самое оно.
Подобрал по каталогу опоры под диаметр моих направляющих, по имеющимся размерам нарисовал их в 3D, все в том же Компас-е.
Друг дал на временное пользование 3D принтер, за пару дней я успел напечатать все опоры и еще несколько дополнительных деталей. Напечатанные опоры встали очень плотно, и это придало всей конструкции хорошую жесткость.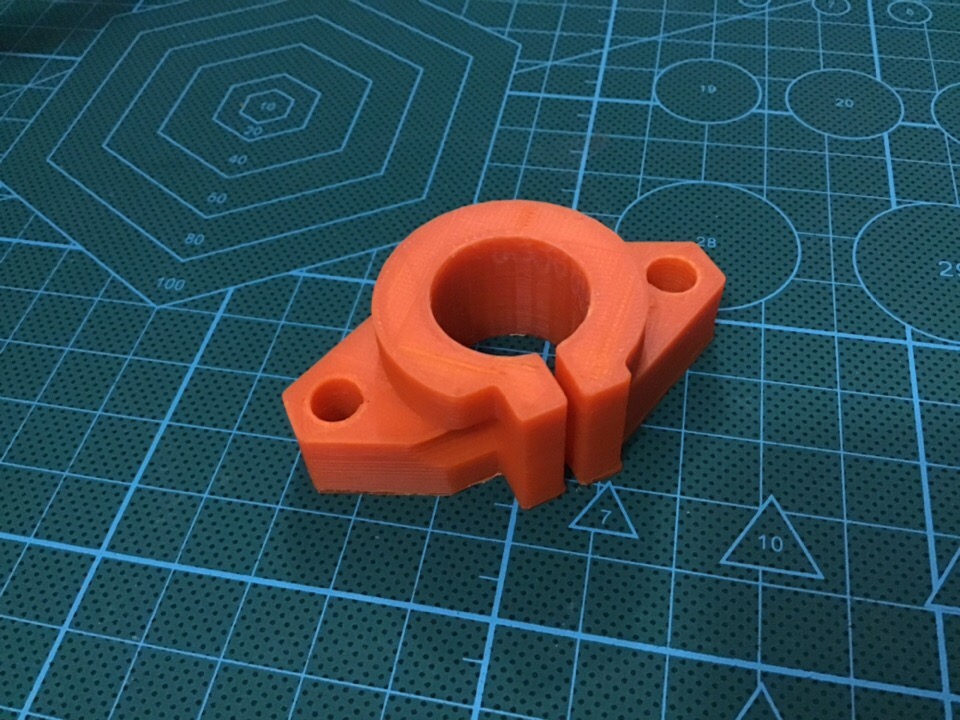
На обработанные концы шпильки, по посадке надел шариковые радиальные подшипники. В нижней части подшипники между нижней плитой стянул гайкой. По правильному, надо использовать опорные подшипники или конические.
В качестве силовой установки решил использовать мотор редуктор от стеклоподъемников автомобиля ВАЗ 2110, он создает хороший крутящий момент. Предположил, что его хватит, для того чтобы прокрутить шпильку, нагруженную двадцатью килограммами.
Выходной вал мотор — редуктора квадратного сечения 7×7 мм., для соединения его с хвостом шпильки пришлось напечатать муфту.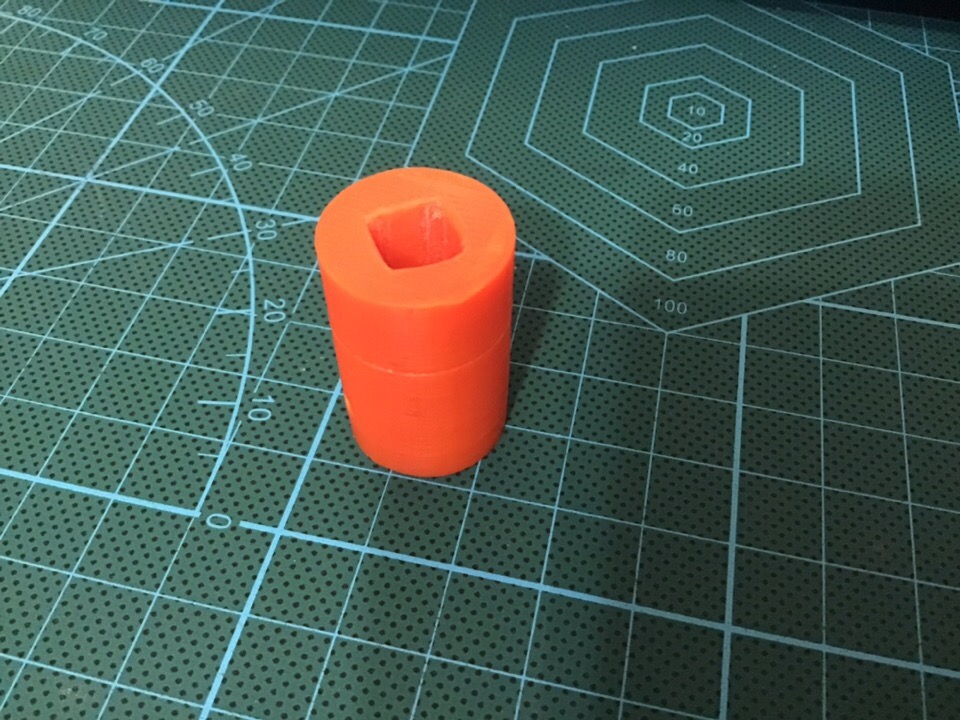
Что касается работы двигателя применительно испытательной машины, то для проведения корректного испытания, скорость нагрузки должна практически не изменяться. В современных двигательных системах это реализовано в электронных приводах управления. В моем же случае чтобы во время нагрузки скорость движения подвижной плиты не уменьшалась, двигатель должен иметь такую мощность, чтобы не замечать возрастающую на него нагрузку, либо реализовывать это программно, поднимая мощность. Но в таком случае требуется иметь обратную связь, чтобы контролировать скорость.
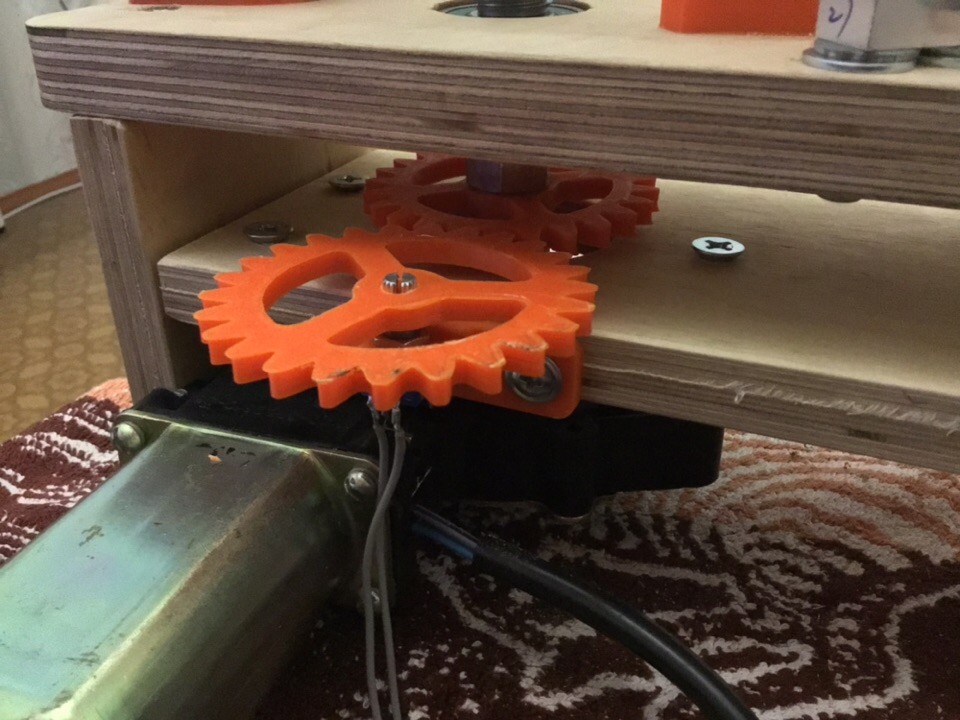
Для измерения расстояния перемещения подвижной плиты, я решил установить энкодер на 24 импульса за оборот, это позволит измерять расстояние с точностью 0,1 мм, этого более чем достаточно, учитывая что в сочленении шпилька / гайка имеется люфт. Надеюсь, что энкодер поможет мне в измерении реальной скорости движения. Датчик решил вынести в сторону, напечатав две шестеренки с передаточным отношением один к одному, а также кронштейн для крепления его к торцу несущей плиты мотор — редуктора. После печати, шестеренки получились немного восьмеркой, но это не страшно, главное, что между ними есть зацепление.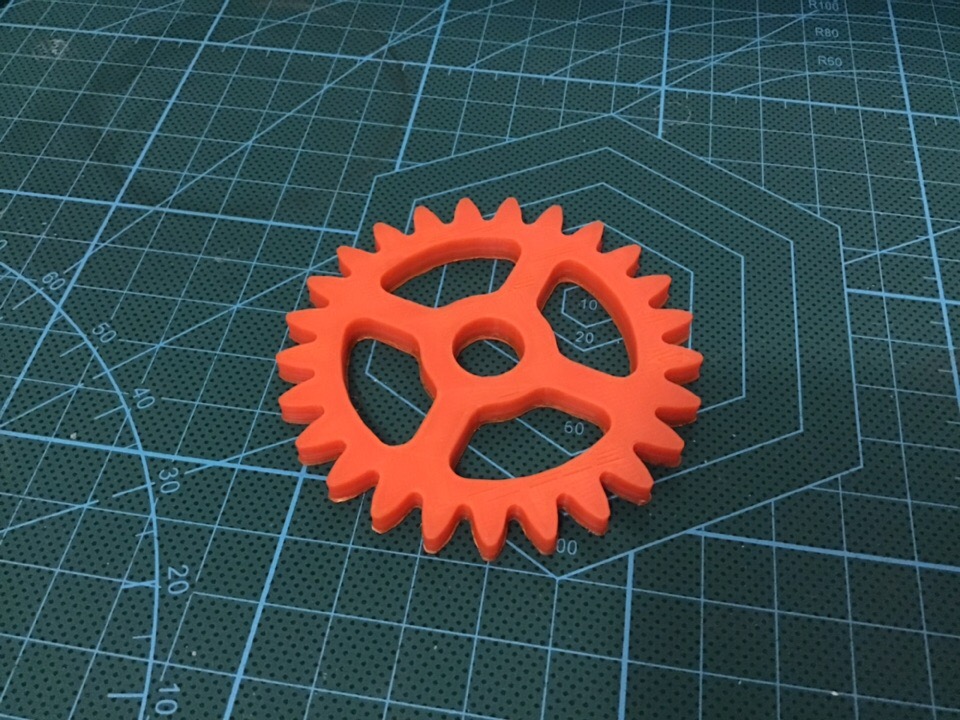
Машина получилась с двумя рабочими зонами, нижней и верхней. Датчик силы на 20 кг. как и собранная машина, консольного типа, его я установил в нижней части, чтобы не мешались провода в случае крепления на подвижной или верхней плите.
Первая часть на этом подошла к концу, приятного чтения, друзья!
ПС. На имеющиеся ошибки прошу указать в личном сообщении
