Таймеры и триггеры CODESYS. Еще один шаг Arduino к классическому ПЛК
Случается программировать контроллеры (ПЛК) в среде CODESYS. Все, кто имел дело с этой системой, знают, что в любом проекте присутствует библиотека Standard.lib, в которой реализованы базовые таймеры, триггеры, счетчики и некоторое кол-во других функций и функциональных блоков. Многие из этих блоков постоянно используются в программах для ПЛК. А сама библиотека, как и языки программирования CODESYS, является воплощением стандарта IEC 61131–3, т.е. призвана помочь при программировании классических ПЛК задач.
Одна из особенностей программ для ПЛК в том, что основной цикл программы должен выполняться без существенных задержек, в нем не должно быть внутренних циклов с неопределенным временем выхода или синхронных вызовов «задумчивых» функций, особенно это касается коммуникаций по медленным каналам. Обновление входных и выходным образов процесса происходит только на границе основного цикла, и чем дольше мы будем «сидеть» внутри одной итерации цикла, тем меньше мы будет знать о реальном состоянии объекта управления, в конечном итоге сработает watchdog переполнения времени выполнения цикла. Многие могут мне возразить, сказав, что современные ПЛК многозначны, есть с поддержкой аппаратных прерываний. Согласен, но разговор о таких системах не входит в мои планы, я же хочу поговорить о (квази, псевдо — выбирайте) ПЛК однозадачной реализации (без прерываний) на базе микропроцессорной платформы Arduino, в котором есть только один основной цикл. Кстати, не лишним будет сказать, что на написание данной заметки меня сподвигла статья Ардуино-совместимый ПЛК CONTROLLINO, часть 1 о попытке аппаратного воплощения Arduino в пром. ПЛК.
Несколько слов об Arduino. С точки зрения программиста ПЛК, Arduino — это типичный контроллер с одним очень быстрым или, наоборот, очень медленным циклом loop (). На время выполнения цикла не накладывается никаких ограничений, и он может отработать и один, и бесконечное кол-во раз — по замыслу программиста. Когда программа проста и сводится к выполнению последовательных операций, регуляторов, без параллельных событий, то достаточно чередовать операции бесконечными вложенными циклами проверки условий и синхронными задержками типа delay (). Последовательные шаги такой программы будут выполняться буквально построчно, просто и логично. Но, как только возникает необходимость в программировании параллельных операций, необходимо менять парадигму программы.
В однозадачной системе добиться видимой параллельности можно только очень быстрым последовательным сканированием параллельных состояний, не задерживаясь подолгу на каждом вызове функции или проверке условия. С физическими входами-выходами проблем нет, функции отрабатывают достаточно быстро, а вот delay () становится неоправданным тормозом. И вот тут на смену приходят неблокирующие таймеры, те самые, которые в программировании ПЛК являются классикой. Суть в том, что для их работы используется миллисекундный счетчик времени, и все действия привязаны к значениям этого глобального счетчика.
А теперь давайте вспомним ту самую Standard.lib из CODESYS. В ней как раз реализованы МЭК-овские неблокирующие таймеры. Я взял ее за основу и портировал функции таймеров и триггеров в библиотечный код Arduino (С++). Т.е. попытался приблизить Arduino к классическому ПЛК.
Ниже я приведу краткое описание портированных функциональных блоков (FB) CODESYS и их аналоги в моей библиотеке plcStandardLib, все временные диаграммы верны для новой библиотеки Arduino. Подробнее описание исходных блоков можно посмотреть, например, в русскоязычной справке по CODESYS.
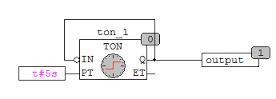
TON — функциональный блок «таймер с задержкой включения»
TON(IN, PT, Q, ET)
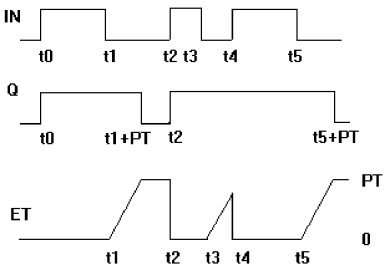
Входы IN и PT типов BOOL и TIME соответственно. Выходы Q и ET аналогично типов BOOL и TIME. Пока IN равен FALSE, выход Q = FALSE, выход ET = 0. Как только IN становится TRUE, начинается отсчет времени (в миллисекундах) на выходе ET до значения, равного PT. Далее счетчик не увеличивается. Q равен TRUE, когда IN равен TRUE, а ET равен PT, иначе FALSE. Таким
образом, выход Q устанавливается с задержкой PT от фронта входа IN.
В Arduino IDE:
Варианты объявлений:
TON TON1();
TON TON1(unsigned long PT); // с заданием интервала времени PT
Варианты использования:
Q = TON1.Run(boolean IN); // вызов "все в одном"
TON1.IN = IN;
TON1.Run();
Q = TON1.Q;
Временная диаграмма работы TON:

TOF — функциональный блок «таймер с задержкой выключения»
TOF(IN, PT, Q, ET)
Входы IN и PT типов BOOL и TIME соответственно. Выходы Q и ET аналогично типов BOOL и TIME. Если IN равен TRUE, то выход Q = TRUE и выход ET = 0. Как только IN переходит в FALSE, начинается отсчет времени (в миллисекундах) на выходе ET. При достижении заданной длительности отсчет останавливается. Выход Q равен FALSE, если IN равен FALSE и ET равен PT, иначе — TRUE. Таким образом, выход Q сбрасывается с задержкой PT от спада входа IN.
В Arduino IDE:
Очень похоже на TON, для краткости:
TOF TOF1(unsigned long PT); // с заданием интервала времени PT
Q = TOF1.Run(boolean IN); // вызов "все в одном"
Временная диаграмма работы TOF:
TP — функциональный блок «импульс-таймер»
TP(IN, PT, Q, ET)
Входы IN и PT типов BOOL и TIME соответственно. Выходы Q и ET аналогично типов BOOL и TIME. Пока IN равен FALSE, выход Q = FALSE, выход ET = 0. При переходе IN в TRUE выход Q устанавливается в TRUE и таймер начинает отсчет времени (в миллисекундах) на выходе ET до достижения длительности, заданной PT. Далее счетчик не увеличивается. Таким образом, выход Q генерирует импульс длительностью PT по фронту входа IN.
В Arduino IDE:
Очень похоже на TON, для краткости:
TP TP1(unsigned long PT); // с заданием интервала времени PT
Q = TP1.Run(boolean IN); // вызов "все в одном"
Временная диаграмма работы TP:

R_TRIG — функциональный блок «дeтектор фронта»
Функциональный блок R_TRIG генерирует импульс по переднему фронту входного сигнала. Выход Q равен FALSE до тех пор, пока вход CLK равен FALSE. Как только CLK получает значение TRUE, Q устанавливается в TRUE. При следующем вызове функционального блока выход сбрасывается в FALSE. Таким образом, блок выдает единичный импульс при каждом переходе CLK из FALSE в TRUE.
Пример CODEDESYS на языке ST:
RTRIGInst : R_TRIG ;
RTRIGInst(CLK:= VarBOOL1);
VarBOOL2 := RTRIGInst.Q;
В Arduino IDE:
Объявление:
R_TRIG R_TRIG1;
Варианты использования:
Q = R_TRIG1.Run(boolean CLK); // вызов "все в одном"
R_TRIG1.CLK = CLK;
R_TRIG1.Run();
Q = R_TRIG1.Q;
F_TRIG — функциональный блок «дeтектор спада»
Функциональный блок F_TRIG генерирует импульс по заднему фронту входного сигнала.
Выход Q равен FALSE до тех пор, пока вход CLK равен TRUE. Как только CLK получает значение FALSE, Q устанавливается в TRUE. При следующем вызове функционального блока выход сбрасывается в FALSE. Таким образом, блок выдает единичный импульс при каждом переходе CLK из TRUE в FALSE.
В Arduino IDE:
F_TRIG F_TRIG1;
Q = F_TRIG1.Run(boolean CLK); // вызов "все в одном"
RS_TRIG — функциональный блок RS-триггер / SR_TRIG — функциональный блок SR-триггер
Переключатель с доминантой выключения, RS-триггер:
Q1 = RS (SET, RESET1)
Переключатель с доминантой включения:
Q1 = SR (SET1, RESET)
Входные переменные SET и RESET1 — как и выходная переменная Q1 типа BOOL.
В Arduino IDE:
RS_TRIG RS_TRIG1;
Q = RS_TRIG1.Run(boolean SET, boolean RESET); // вызов "все в одном"
SR_TRIG SR_TRIG1;
Q = SR_TRIG1.Run(boolean SET, boolean RESET); // вызов "все в одном"
Исходный код и пример
/*
* plcStandardLib_1.h
*
* Created on: 01.01.2017
* Author: Admin
*/
#ifndef PLCSTANDARDLIB_1_H_
#define PLCSTANDARDLIB_1_H_
#if ARDUINO >= 100
#include
#else
#include
#endif
/* ------------------- TON ------------------- */
class TON
{
public:
TON();
TON(unsigned long PT);
boolean Run(boolean IN);
boolean Q; // выходная переменная
boolean IN; // входная переменная
unsigned long PT; // входная переменная
unsigned long ET; // выходная переменная - текущее значение таймера
private:
boolean _M; // внутренний флаг
unsigned long _StartTime;
};
/* ------------------- TOF ------------------- */
class TOF
{
public:
TOF();
TOF(unsigned long PT);
boolean Run(boolean IN);
boolean Q; // выходная переменная
boolean IN; // входная переменная
unsigned long PT; // входная переменная
unsigned long ET; // выходная переменная - текущее значение таймера
private:
boolean _M; // внутренний флаг
unsigned long _StartTime;
};
/* ------------------- TP ------------------- */
class TP
{
public:
TP();
TP(unsigned long PT);
boolean Run(boolean IN);
boolean Q; // выходная переменная
boolean IN; // входная переменная
unsigned long PT; // входная переменная
unsigned long ET; // выходная переменная - текущее значение таймера
private:
boolean _M; // внутренний флаг
unsigned long _StartTime;
};
/* ------------------- R_TRIG ------------------- */
class R_TRIG // детектор фронта сигнала
{
public:
R_TRIG();
boolean Run(boolean CLK);
boolean CLK; // входная переменная
boolean Q; // выходная переменная
private:
boolean _M; // внутренний флаг
};
/* ------------------- F_TRIG ------------------- */
class F_TRIG // детектор спада сигнала
{
public:
F_TRIG();
boolean Run(boolean CLK);
boolean CLK; // входная переменная
boolean Q; // выходная переменная
private:
boolean _M; // внутренний флаг
};
/* ------------------- RS_TRIG ------------------- */
class RS_TRIG // детектор спада сигнала
{
public:
RS_TRIG();
boolean Run();
boolean Run(boolean SET, boolean RESET);
boolean SET; // установка триггера
boolean RESET; // сброс триггера
boolean Q; // выходная переменная
//private:
};
/* ------------------- SR_TRIG ------------------- */
class SR_TRIG // детектор спада сигнала
{
public:
SR_TRIG();
boolean Run();
boolean Run(boolean SET, boolean RESET);
boolean SET; // установка триггера
boolean RESET; // сброс триггера
boolean Q; // выходная переменная
//private:
};
#endif /* PLCSTANDARDLIB_H_ */
/*
* plcStandardLib_1.h
*
* Created on: 01.01.2017
* Author: Admin
*/
#include "plcStandardLib_1.h"
/* ------------------- TON ------------------- */
TON::TON()
{
IN = false;
PT = 0;
_M = false;
_StartTime = 0;
Q = false;
ET = 0;
}
TON::TON(unsigned long PT)
{
IN = false;
TON::PT = PT;
_M = false;
_StartTime = 0;
Q = false;
ET = 0;
}
boolean TON::Run(boolean IN)
{
TON::IN = IN;
if (!TON::IN) {
Q = false;
ET = 0;
_M = false;
} else {
if (!_M) {
_M = true; // взводим флаг М
_StartTime = millis();
// ET = 0; // сразу = 0
} else {
if (!Q)
ET = millis() - _StartTime; // вычисляем время
}
if (ET >= PT)
Q = true;
}
return Q;
}
/* ------------------- TOF ------------------- */
TOF::TOF()
{
IN = false;
PT = 0;
_M = false;
_StartTime = 0;
Q = false;
ET = 0;
}
TOF::TOF(unsigned long PT)
{
IN = false;
TOF::PT = PT;
_M = false;
_StartTime = 0;
Q = false;
ET = 0;
}
boolean TOF::Run(boolean IN)
{
TOF::IN = IN;
if (TOF::IN) {
Q = true;
ET = 0;
_M = true;
} else {
if (_M) {
_M = false; // сбрасываем флаг М
_StartTime = millis();
// ET = 0; // сразу = 0
} else {
if (Q)
ET = millis() - _StartTime; // вычисляем время
}
if (ET >= PT)
Q = false;
}
return Q;
}
/* ------------------- TP ------------------- */
TP::TP()
{
IN = false;
PT = 0;
_M = false;
_StartTime = 0;
Q = false;
ET = 0;
}
TP::TP(unsigned long PT)
{
IN = false;
TP::PT = PT;
_M = false;
_StartTime = 0;
Q = false;
ET = 0;
}
boolean TP::Run(boolean IN)
{
TP::IN = IN;
if (!_M) {
if (TP::IN) {
_M = true; // взводим флаг М
_StartTime = millis();
if (ET < PT)
Q = true;
}
} else {
if (Q) {
ET = millis() - _StartTime; // вычисляем время
if (ET >= PT)
Q = false;
} else {
if (!TP::IN) {
_M = false;
ET = 0;
}
}
}
return Q;
}
/* ------------------- R_TRIG ------------------- */
R_TRIG::R_TRIG()
{
CLK = false;
_M = false;
Q = false;
}
boolean R_TRIG::Run(boolean CLK)
{
R_TRIG::CLK = CLK;
Q = R_TRIG::CLK && !_M;
_M = R_TRIG::CLK;
return Q;
}
F_TRIG::F_TRIG()
{
CLK = false;
_M = true;
Q = false;
}
boolean F_TRIG::Run(boolean CLK)
{
F_TRIG::CLK = CLK;
Q = !F_TRIG::CLK && !_M;
_M = !F_TRIG::CLK;
return Q;
}
/* ------------------- RS_TRIG ------------------- */
RS_TRIG::RS_TRIG()
{
SET = false;
RESET = false;
Q = false;
}
boolean RS_TRIG::Run(boolean SET, boolean RESET)
{
RS_TRIG::SET = SET;
RS_TRIG::RESET = RESET;
Q = !RESET and (SET or Q);
return Q;
}
boolean RS_TRIG::Run()
{
Q = !RESET and (SET or Q);
return Q;
}
/* ------------------- SR_TRIG ------------------- */
SR_TRIG::SR_TRIG()
{
SET = false;
RESET = false;
Q = false;
}
boolean SR_TRIG::Run(boolean SET, boolean RESET)
{
SR_TRIG::SET = SET;
SR_TRIG::RESET = RESET;
Q = SET or (!RESET and Q);
return Q;
}
boolean SR_TRIG::Run()
{
Q = SET or (!RESET and Q);
return Q;
}
#include "plcStandardLib_1.h"
#define LED 13
#define ButtonIn 7
TON TON1(500); // Инициализация задержки включения, 500мс.
TON TON2(1000); // Инициализация задержки включения, 1000мс.
TOF TOF1(500); // Инициализация задержки выключения, 500мс.
TP TP1(300); // Инициализация единичного импульса, 300мс.
TP TP2(200); // Инициализация единичного импульса, 200мс.
R_TRIG R_TRIG1; // Инициализация триггера фронта для кнопки
void setup() {
pinMode(ButtonIn, INPUT_PULLUP);
pinMode(LED, OUTPUT);
}
void loop() {
digitalWrite(LED, TP1.Run(R_TRIG1.Run(TON1.Run(digitalRead(ButtonIn)))));
// TON1 - фильтрует дребезг контакта
// R_TRIG1 - детектирует фронт сигнала
// TP1 - генерирует импульс по фронту
digitalWrite(LED, TP2.Run(TON2.Run(!TON2.Q))); // генератор импульса на базе TON и TP
// TON2.Run(!TON2.Q)) - генератор единичного импульса
// TP2 - генерирует импульс по фронту
digitalWrite(LED, TOF1.Run(TON1.Run(digitalRead(ButtonIn)))); // Задержка включения и отключения
}
Например, чтобы отфильтровать дребезг контактов кнопки (при размыкании тоже!) достаточно вот такого кода:
FiltredButtonIn = TON1.Run(digitalRead(ButtonIn))
В качестве заключения: вот так в CODESYS выглядит работа генератора импульса на базе цепочки таймеров TON и TP. В начале TON охватывается обратной связью с инверсией, и из него получается генератор единичного импульса, который запускает работу импульс-генератора TP. В моем примере Arduino аналог этого выглядит так:
digitalWrite(LED, TP2.Run(TON2.Run(!TON2.Q)));
