Structure from motion

Если посмотреть на последовательность кадров, в которых движется камера, то мозг легко воспринимает геометрическую структуру содержимого. Однако, в компьютерном зрении это не тривиальная проблема. В этой статье я постараюсь описать возможное решение этой задачи.
Перед прочтением этой статьи не помешает внимательно прочитать статью «Основы стереозрения».
Итак, перед нами стоит задача превращения последовательности двумерных изображений в трехмерную структуру. Задача это не простая, и нужно ее упрощать.
Во-первых, предположим, что кадра у нас только два. Обозначим их как A и B.
Во-вторых, будем работать с конечным множеством точек, соответствующих друг другу на кадрах A и B. Точки на изображении обозначим как  . Тогда точки на кадрах A и B будут
. Тогда точки на кадрах A и B будут  и
и  . Каждая пара точек соответствует точке в трехмерном пространстве
. Каждая пара точек соответствует точке в трехмерном пространстве  .
.
Теперь необходимо определиться как искать и . Для этого на первом кадре выберем точки, с наибольшей контрастностью — «особенные» точки (features). Для этого можно использовать surf, fast или что-нибудь другое. Эти точки и будут . Затем необходимо найти соответствия этим точкам на втором кадре при помощи того же алгоритма surf или оптического потока. А это уже точки .
А теперь мы подошли к центральному вопросу этой статьи: как из точек и (точек-соответствий, point correspondences) получить координаты точек и положение камеры в пространстве? Сначала необходимо разобраться с тем, как же точка она попадает на изображение. Нужно построить математическую модель камеры.
Модель проективной камеры
Так как вы, вероятно, уже прочитали статью «Основы стереозрения», эта формула должна быть знакома:  .
.
Или если описать более полно:  .
.
Здесь X — это трехмерная точка в пространстве.
x — это координата точки на изображении в однородных координатах, и  , т. е. перевод в обычные координаты изображения будет таким:
, т. е. перевод в обычные координаты изображения будет таким:  .
.
Процесс перевода точки в пространстве в координаты изображения можно разбить на два этапа, реализуемыми двумя матрицами в формуле:
- [R|t] — R и t представляют собой положение камеры в пространстве. На этом этапе координаты точек переводятся в локальные координаты камеры. R — матрица поворота размером 3×3, t — трехмерный вектор смещения — вместе они составляют матрицу перехода [R|t] (размером 3×4), она определяет положение камеры в кадре. [R|t] — эта то же, что и видовая матрица в трехмерной графике (если не брать в расчет, что она имеет размер не 4×4).
 — это матрица поворота камеры,
— это матрица поворота камеры,  — трехмерные координаты точки расположения камеры в пространстве. R и t называют внешними параметрами камеры.
— трехмерные координаты точки расположения камеры в пространстве. R и t называют внешними параметрами камеры. - K — матрица камеры. Локальные координаты точек переводятся в однородные координаты изображения. fx, fy — фокальное расстояние в пикселях, cx, cy — оптический центр камеры (обычно это координаты центра изображения). Эти параметры называют внутренними параметрами камеры.
Важным свойством этой модели является то, что точки лежащие на одной прямой в пространстве будут также лежать на одной прямой на изображении.
На самом деле, описываемая модель может быть очень неточной. В реальных камерах вступают в игру линзовые искажения, из-за которых прямые линии становятся кривыми. Это искажение называются дисторсией. Существуют разные модели, исправляющие эти искажения. Здесь есть некоторые их реализации. Параметры этой модели также входит в понятие внутренних параметров камеры.
С учетом дисторсии наша формула усложняется:  , где D (X) — функция, принимающая однородные координаты точек изображения и возвращающая обычные координаты на изображении. Также позже нам понадобится обратная функция — InvD (ix).
, где D (X) — функция, принимающая однородные координаты точек изображения и возвращающая обычные координаты на изображении. Также позже нам понадобится обратная функция — InvD (ix).
Внутренние параметры камеры должны быть известны заранее. Выяснение этих параметров — это отдельная тема, будем считать, что они уже есть.
Искажения дисторсии не зависит от глубины видимых точек, а только координат на изображении. А значит «исправить» изображение (получив прямые линии там, где они и должны быть) можно не зная внешних параметров камеры и координат точек в пространстве. Дальше тогда можно использовать модель камеры без функции D.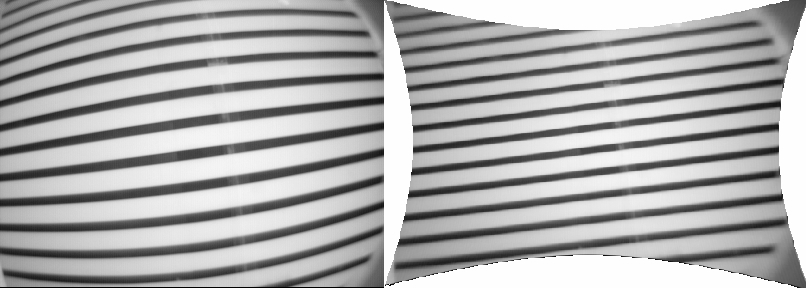
Изображение с дисторсией слева, и справа — «исправленное» от линзовых искажений изображение. Видно, что линии стали прямыми.
Нормализация точек
Мы договорились, что внутренние параметры нам известны, известны и координаты точек на изображении, а значит, остается найти [R|t] и Xi (положения камеры и точек в пространстве).
Наша формула выходит уже немного сложной, надо ее упрощать. Для начала сделаем так: 
Выражение остается справедливым. Продолжим: 
Обозначим  (а если без дисторсии, то
(а если без дисторсии, то  ). Так как все параметры известны, nxi можно посчитать заранее. Вспомнив как выглядит матрица K, можно понять, что nxz = 1. Это поможет при дальнейших расчетах. В результате формула становится проще:
). Так как все параметры известны, nxi можно посчитать заранее. Вспомнив как выглядит матрица K, можно понять, что nxz = 1. Это поможет при дальнейших расчетах. В результате формула становится проще: 
nxi — это нормализованные точки изображения.
Фундаментальная и сущностная матрицы
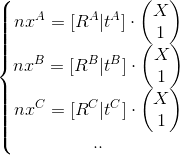
Итак, предположим, у нас есть два изображения, полученные от одной камеры. Нам неизвестны положения камер и координаты точек в пространстве. Договоримся ввести расчеты относительно первого кадра. Так получается, что RA = I (I — единичная матрица), tA = (0, 0, 0). Положение камеры в кадре B обозначим просто как R и t (т. е. RB = R, tB = t). [R|t] — это матрица координат второго кадра, и оно же — матрица смещения положения камеры от кадра A к кадру B. В итоге имеем получаем такую систему (без учета дисторсии!): 
Используя фундаментальную матрицу F (fubdamental matrix), получим такое уравнение: 
Также заметим, что F имеет размер 3×3 и должна иметь ранг равный 2.
Из фундаментальной матрицы F уже можно получить необходимые нам R и t. Однако дисторсия все портит, с ее учетом зависимость точек между кадрами будет нелинейная, и это уже не будет работать.
Но перейдем к нормализованным точкам и используем сущностную матрицу E (essential matrix). Все будет почти тем же, но проще:  — система уравнений для сущностной матрицы;
— система уравнений для сущностной матрицы;  — уравнение для нее же.
— уравнение для нее же.
А тут мы можем спокойно брать в расчет дисторсию.
Фундаментальная и сущностная матрицы связаны таким образом: 
Теперь перед нами встала задача нахождения либо фундаментальной матрицы F, либо сущностной матрицы E, из которой позже сможем получить на R и t.
Вычисление сущностной матрицы (8-ми точечный алгоритм)
Вернемся к уравнению:
Эту же формулу можно переписать в таком виде (вспоминаем, что  и
и  ):
):  , здесь опущен параметр i ради удобства, но имеем ввиду что это справедливо для каждой точки.
, здесь опущен параметр i ради удобства, но имеем ввиду что это справедливо для каждой точки.
Введем вектор e и матрицу M: 

Тогда всю систему уравнений можно представить в виде: 
Получаем однородную систему уравнений, решив которую, получим E из е. Очевидным решением здесь является нулевой вектор, но нас явно интересует не он. Для решения необходимо минимум 8 точек.
Решение систем однородных уравнений при помощи сингулярного разложения
Сингулярное разложение — это декомпозиция матрицы, приводящее ее к такому виду:  , где U, V — ортогональные матрицы, W — диагональная матрица. При этом диагональные элементы матрицы W принято располагать в порядке убывания. Также ранг матрицы W — это и ранг матрицы M. А так как W — диагональная матрица, то ее ранг — это количество ненулевых диагональных элементов.
, где U, V — ортогональные матрицы, W — диагональная матрица. При этом диагональные элементы матрицы W принято располагать в порядке убывания. Также ранг матрицы W — это и ранг матрицы M. А так как W — диагональная матрица, то ее ранг — это количество ненулевых диагональных элементов.
Итак, было дано уравнение вида: , где M — известная нам матрица, e — вектор, который на необходимо найти.
Строки VT, которым соответствует нулевой диагональный элемент W на этой же строке, являются нуль-пространствами матрицы M, т. е. в данном случае являются линейно-независимыми решениями нашей системы. А так как элементы W располагаются в порядке убывания, то смотреть нужно последний элемент матрицы W. И решением будет последняя строка  .
.
При расчете сущностной матрицы, используя 8 точек, последний элемент матрицы W должен быть равен нулю — W99=0, но на практике, в следствии ошибок, там будет какое-то ненулевое значение, и по величине этого значения можно оценить величину этой ошибки. При этом мы получим лучшее решение.
Тем не менее, найденное нами решение — не единственное, более того, решений будет бесконечно много. Если умножить найденное решение на какой-либо коэффициент, оно все-равно останется решением. Таким образом в уравнении спрятался коэффициент s (который может быть любым):  .
.
Правда, все эти решения будут линейно зависимыми, а интересовать нас будет только одно из них.
Отсюда и матрица E может также масштабироваться. Вот только расчеты ведутся в однородном пространстве и, как следствие, от масштабирования (т. е. от коэффициента s) не зависят.
Наверное, стоит масштабировать получившуюся матрицу E так, чтобы E33 = 1.
Вычисление сущностной матрицы (7-ми точечный алгоритм)
Можно обойтись и 7-ю точками.
Если мы возьмем только 7 точек, то M будет матрицей размером 7×9.
Вернемся к выражению:
W — будет также матрицей размером 9×9, как и раньше, но теперь не только W99 будет равно нулю (ну опять же без учета ошибок вычислений), но и W88. Это значит, что имеем два линейно-независимых решения уравнения . Из них получим две матрицы E1 и E2. Решением будет выражение  .
.
Сущностная матрица, как и фундаментальная, должна иметь ранг равный двум, а так как она имеем размер 3×3, то значит определитель матрицы равен 0 —  . Следовательно
. Следовательно  . Если расписать это уравнение, то получим кубическое уравнение, имеющее 1 или 3 решения
. Если расписать это уравнение, то получим кубическое уравнение, имеющее 1 или 3 решения  . А значит получим одну или три матрицы E.
. А значит получим одну или три матрицы E.
Расписывать решение этого уравнения я не буду (оно объемное, ну и считайте это домашним заданием). В крайнем случае можете просто посмотреть сразу реализацию в opencv.
Уточнение сущностной (фундаментальной) матрицы
Так как все в этом мире несовершенно, то мы будем постоянно получать ошибки, с которыми нам необходимо бороться. Так сущностная матрица должна иметь ранг равный 2 и следовательно . На практике, однако, это будет нет так.
Чтобы увидеть в чем это выражается, возьмем фундаментальную матрицу. Сущностная матрица / фундаментальная матрица — разница лишь в том, с какими точками мы работаем (нормализованными или точками на изображении).
Луч, выпущенный из точки кадра A, ляжет в кадр B как прямая линия (или не совсем из-за дисторсии, но забудем про нее). Допустим матрица F — это фундаментальная матрица кадров A и B ().
Тогда если выпустить луч из точки  , то в получим прямую l на кадре B —
, то в получим прямую l на кадре B —  . Эта прямая называется эпиполярной линией, т. е.
. Эта прямая называется эпиполярной линией, т. е.  , где ix, iy — координаты точки на изображении. И то же условие для точки на изображении с однородными координатами —
, где ix, iy — координаты точки на изображении. И то же условие для точки на изображении с однородными координатами —  . Точка
. Точка  будет лежать на этой прямой, поэтому
будет лежать на этой прямой, поэтому  . Отсюда и выходит общая формула — .
. Отсюда и выходит общая формула — .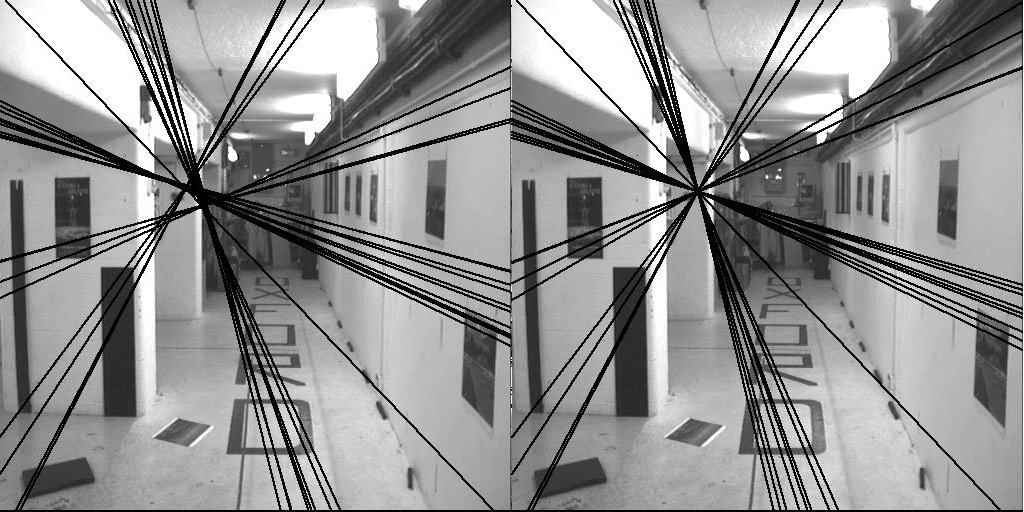
На картинке изображен пример эпиполярных линий, полученных из правильной фундаментальной матрицы (ранг которой равен 2, картинка справа) и неправильной (слева).
Чтобы получить правильную фундаментальную матрицу, воспользуемся свойством сингулярного разложения — приближать матрицу к заданному рангу:  . В идеале W33 (последний элемент диагонали) должен быть равен нулю. Введем новую матрицу W», которая равна W, только у которой элемент W'33 = 0.
. В идеале W33 (последний элемент диагонали) должен быть равен нулю. Введем новую матрицу W», которая равна W, только у которой элемент W'33 = 0.
Тогда исправленный вариант:  .
.
Ровно тот же принцип работает и для сущностной матрицы.
Нормализованная версия алгоритма
Чтобы уменьшить ошибку, получаемую при расчетах, точки трансформируют к определенному ввиду. Выбираются такие матрицы TA и TB, которые (каждый независимо и на своем кадре) смещают среднюю координату точек в точку (0, 0) и масштабируют так, чтобы средняя дистанция дистанция до центра была равна  :
: 
А матрицы TA, B имеют вид: 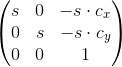 , где c — средняя координата точек кадров, s — коэффициент масштаба.
, где c — средняя координата точек кадров, s — коэффициент масштаба.
После этого вычисляем сущностную матрицу как обычно. После необходимо ее уточнить, как было описано выше. Обозначим полученную матрицу как Et.
Итоговая сущностная матрица —  .
.
В итоге: 
Опять же, если необходимо найти фундаментальную матрицу, все принципы сохраняются.
Получение положения камеры из сущностной матрицы
Введем матрицу H: 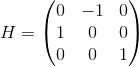
Используем сингулярное разложение на сущностной матрице: 
Тогда получаем такие решения: 


 , где
, где  ,
,  — координаты положения камеры.
— координаты положения камеры.
Нам же необходимо положение камеры в локальных координатах самой камеры:  .
.
Выходит четыре решения:  .
.
В случае 8-ми точечного алгоритма, выбираем из 4-ёх решений. В случае 7-ми точечного алгоритма, выйдет три сущностные матрицы, из которых получится 12 решений. Выбрать нужно только одно, то, которое будет давать меньше ошибок.
Вырожденные случаи
Снова вернемся к вычислению сущностной матрицы. У нас было уравнение:
Далее мы его решали при помощи сингулярного разложения:
Решения данного уравнения зависит от ранга матрицы W, ну или от количества нулей в диагонали этой матрицы (мы же помним, что это отражает ранг матрицы). Вот только с учетом погрешности, считаем нулем в данном случае число, достаточно близкое к нулю.
Имеем такие варианты:
- Нулей нет. Нет решений, вероятно ошибка вышла слишком большой.
- Один нуль. Одно решение, случай при котором число точек больше, либо равно восьми.
- Два нуля. Одно или три решения. Использовалось семь или более точек.
- Три нуля. Тогда должно быть верно условие
 . Такое возможно, если камера не смещалась от кадра к кадру, был только поворот, т. е. t = (0, 0, 0). Либо все точки лежат на одной плоскости. Во втором случае еще есть возможность найти координаты этих точек и положение камеры, но уже другими способами.
. Такое возможно, если камера не смещалась от кадра к кадру, был только поворот, т. е. t = (0, 0, 0). Либо все точки лежат на одной плоскости. Во втором случае еще есть возможность найти координаты этих точек и положение камеры, но уже другими способами.
Вычисление координат точек в пространстве
Допустим сейчас у нас есть больше, чем два кадра — A, B, C, … — положение камер кадров A, B, C, …
— положение камер кадров A, B, C, … — нормализованные точки
— нормализованные точки
Необходимо найти точку 
Представим эту систему так: 

В матричном виде: 
С помощью сингулярного разложения находим вектор  , который
, который  (способом, описанном выше). Тогда
(способом, описанном выше). Тогда  , где s — какой-то неизвестный коэффициент. Выходит
, где s — какой-то неизвестный коэффициент. Выходит  .
.
Оценочная функция
Оценочные функции (cost functions) необходимы, чтобы получив какие-то результаты, оценить насколько достоверными они являются, или сравнить их с другими.
Возьмем нашу модель:  — предполагаемый результат.
— предполагаемый результат. — реальное значение точки.
— реальное значение точки.
Отсюда квадрат ошибки для i-ой точки будет:  .
.
На практике одни точки будут давать более достоверные результаты, чем другие. А некоторые вообще явно будут давать неправильные. В результате возникает необходимость выбрать из общего массива точек только те точки, которым можно доверять, а остальные просто выбросить из расчетов.
Самый простой способ выбрать «достоверные» точки — выбрать какой-то лимит (допустим, 5 пикселей), и брать только те точки, которые дают ошибку меньше этого лимита ( ). Тут же следует отметить, что необходимо учитывать, что точка должна лежать перед камерой в обоих кадрах, иначе ее явно необходимо отбросить.
). Тут же следует отметить, что необходимо учитывать, что точка должна лежать перед камерой в обоих кадрах, иначе ее явно необходимо отбросить.
Таким образом, можно ввести оценочную функцию — количество достоверных точек. И при сравнении, выбирать тот результат, который дает большее количество «достоверных» точек.
А можно воспользоваться другим, более «тонкой» функцией:  , где limit — это выбранный нами лимит (в 5 пикселей).
, где limit — это выбранный нами лимит (в 5 пикселей).
Лучшим будет тот вариант, который будет давать меньшее значение. Понятно, что и здесь следует убирать «недостоверные» точки для будущих расчетов.
Метод RANSAC
- При вычислении сущностной матрицы необходимо отбрасывать «недостоверные» точки, так как они приводят в существенным ошибкам в расчетах. Определить набор подходящих точек можно при помощи алгоритма RANSAC.
Повторяем цикл заданное количество раз (например, 100, 400):- Выбираем случайным образом минимальный набор точек для расчетов (у нас это 7);
- Вычисляем сущностные матрицы из этого набора (напоминаю, может получится либо одна матрица, либо три)
- Оценочной функцией вычисляем достоверность каждой матрицы
- Из предыдущего цикла выбираем сущностную матрицу, которая дает лучший результат;
- Выбираем точки для расчетов, которые дают ошибку при полученной сущностной матрице ошибку меньше заданного порога;
- Из полученного набора точек вычисляем итоговую сущностную матрицу.
Общий алгоритм
- Находим «особенные» точки на первом кадре
- Определяем точки-соответствия между двумя изображениями.
- Находим сущностную (или все-же фундаментальную) матрицу, соответствующую этим двум изображениям при помощи RANSAC.
- У нас будет одно или три решения, из которых получим 4 или 12 возможных матриц [R|t]. Имея положение камер в обоих кадрах, рассчитываем координаты точек в пространстве для каждой возможной матрицы. Из них выбираем лучшую, используя оценочную функцию.
Что дальше?
Изначально мы исходили из предположения, что кадра у нас было всего два.
Чтобы работать с последовательностью кадров, нужно просто разбить последовательность на последовательные пары кадров. Обрабатывая пары кадров, мы получаем смещение камеры от одного кадра к другому. Из этого можно получить координаты положения камеры в остальных кадрах.
Получив главное — положения камер, можно действовать по-разному:
- По точкам-соответствиям получить трехмерные координаты точек в пространстве, выйдет облако точек, которое можно превратить в трехмерную модель
- Использовать фундаментальную матрицу для расчета карты глубины.
- При помощи двух кадров инициализировать карту для SLAM, используя рассчитанные координаты точек в пространстве, можно проще и быстрее получить координаты положения в следующих кадрах.
- ну и другое
В общем, действовать можно по-разному, применяя разные методы, в том числе и те алгоритмы, которые были описаны — не единственные.
Литература
Fundamental matrix, Essential matrix, Eight-point algorithm — больше информации в википедии
Hartley, Zisserman — Multiple View Geometry in Computer Vision — спонсор этой статьи
