Собираем свой маленький беспилотник
Будем делать вот такой, маленький, как на картинке, беспилотный автомобиль.
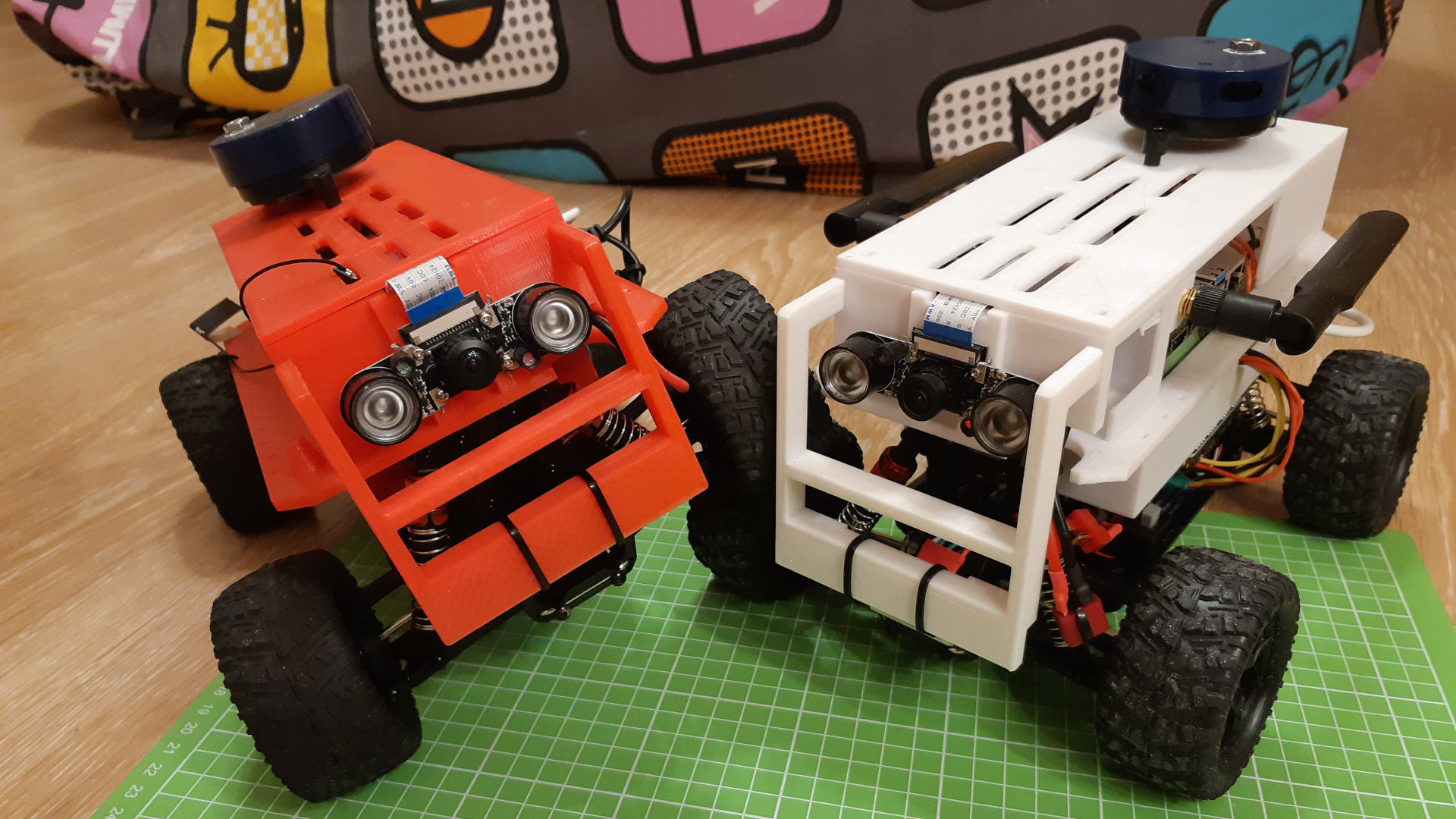 Вот так выглядят маленькие беспилотники
Вот так выглядят маленькие беспилотникиКак я дошёл до этого
Мне всегда были интересны темы беспилотников и роботов, но руки до такого не доходили — боялся слишком большого объёма навыков, которые потребуются для этого.
В марте-апреле 2020 го года, когда сидение дома уже порядком поднадоело, понял, что я созрел для беспилотников. И, вдохновлённый статьёй Беслана, принялся изучать вопрос и заказывать необходимые комплектующие на Али и в других магазинах.
Приезжали заказы в разное время, поэтому, из всего, что попадало под руку, собирал первые версии беспилотника (тогда ещё ни разу не беспилотного).
 Первые шаги
Первые шагиНачиналось всё с черепахоподобного поделия из картона, котому требовался сетевой провод. Провода от двух веб камер были перетянуты кабельными стяжками. А машинка не была соединена с компьютером, и я управлял ей с радиопульта от RC машинки.
В качестве мозга для беспилотника я выбрал Nvidia Jetson Nano Developer kit, а в качестве тачки — Remo Hobby S-Max — это то немногое, что осталось в беспилотнике по сей день.
 Рабочий прототип из картона и макетных плат
Рабочий прототип из картона и макетных платЗатем машинка стала обрастать новыми компонентами: появились беспроводная сеть, лидар, IMU и остальные.
В процессе добавления я осваивал кучу нового:
ROS
Вспоминал/изучал C++
Учился работать с разными устройствами
Осваивал нейронные сети и машинное обучение
Узнавал про алгоритмы, специфичные для роботов и беспилотников
Паял, резал, клеил и всячески работал руками и головой
Когда картон и макетные платы стали слишком замедлять процесс — приобрёл недорогой, но большой 3D принтер, а провода спаял с нужными разъёмами.
Сперва спроектировал всё из картона и соплей (но с котиком)
 Почти рабочий прототип
Почти рабочий прототипА потом уже сделал корпус из пластика. В процессе пришлось освоить проектирование в CAD (использовал FreeCAD) и разобраться с настройкой принтера.

Потом писал алгоритмы, исправлял баги и добавлял датчики.
Что получилось
Платформа, для которой вы можете писать различные алгоритмы по исследованию, картографированию, распознаванию и другие — датчиков для этого хватает, а код можно писать на питоне прямо в браузере.
Тут есть:
камера (ночного видения), что бы смотреть и распознавать объекты
однолучевой лидар и лазерные датчики расстояния, что бы строить карту стен и других препятствий
управление машинкой, что бы ехать, куда хочется
колёсная одометрия и IMU, что бы понимать куда вы заехали
Уже есть несколько готовых скриптов (Jupyter notebook’ов):
что бы просто поуправлять машинкой с джойстика, глядя при этом на картинку с камеры и на вид сверху, построенный по лидару
беспилотный режим: машинка сама исследует помещение, строит его карту и ищет жертву живность (людей, кошек и собак), а, найдя такой объект, — следует за ним
Я потратил много времени и оттоптал много разных граблей и велосипедов, и теперь хочется поделиться своим опытом и наработками с сообществом.
Что требуется (список компонентов)
RC машинка Remo Hobby Smax 1:16 RH1635
Контроллер мотора, у меня такой: SURPASS HOBBY KK 35A ESC Waterproof Electric Speed Controller for 1/16 RC Car Brushless Motor Power system
Одноплатный компьютер Nvidia Jetson Nano Developer Kit
Микро SD карта на 64 GB (возможно, влезет и на 32)
wi-fi карточка типа такой и пара антен с IPEX разъёмом (USB свистки с wi-fi показали себя очень плохо)
Два датчика Холла типа KY-003 для Arduino
магнит примерно такого размера: 20×3x2 мм
камера, работающая с Jetson Nano; у меня IMX219 8MP Infrared Night Vision 160 Degree FOV + 2 Infrared LED Lights
система питания для jetson’а типа T208 или T200 на 18650 акумуляторах и сами аккумуляторы или повербанк (но тут нужно брать с хорошим током и нужно будет stl модельку для корпуса под него исправить)
однолучевой лидар типа YDLIDAR X2L
IMU типа Bosh BNO055
ШИМ плата PCA9685 для соединения контроллера двигателя и Jetson’а
Конвертер логических уровней для преобразования из 5V в 3.3V и обратно
короткий USB — USB-C дата кабель (что бы заменить слишком длинный кабель от лидара)
(опционально) два датчика расстояния; у меня VL53L0X (6 pin)
доступ к 3D принтеру
провода, коннекторы, стяжки, инструменты и т.д.
руки, которые смогут всё это соединить
Более подробно и со ссылками есть на github проекта.
Как собрать
Сделал туториал по сборке в виде нескольких видео.
Там же видео проездов и обсуждение задач и проблем.
Часть 1. Рассказываю, что и зачем делаю, соединяю основные компоненты.
Часть 2. Паяю, соединяю компоненты проводами.
Часть 3. Гоняю, рассказываю про софт и алгоритмы.
Часть 4. Запускаю два беспилотника вместе; добавляю лазерные сенсоры, что бы они друг друга видели
Ссылки
Код, STL модели для печати, описание и ссылки есть на github проекта.
Видео есть на моём канале, там же будут выходить новые серии.
Обсуждение этого и других интересных проектов роботов и беспилотников в telegram канале.
Что дальше
Буду дорабатывать алгоритмы:
дотюню/улучшу текущие
добавлю лидарную одометрию (ранее не успел допилить NDT, а теперь можно будет доделать)
добавлю салки/прятки с кошкой
другие алгоритмы исследования и детекции
Добавлю манипулятор, что бы можно было собирать с пола игрушки в ящик.
Попробую другие датчики для колёсной одметрии: магнитный датчик угла.
