Роботов научили падать безопасно, изучив падения кошек
 От неожиданного падения никто не застрахован. Всегда есть риск неудачно споткнуться и полететь на пол. Такое может случиться не только с человеком, но и с роботом.
От неожиданного падения никто не застрахован. Всегда есть риск неудачно споткнуться и полететь на пол. Такое может случиться не только с человеком, но и с роботом.
Исследователи из технологического института Джорджии разработали алгоритм, который обеспечивает падение робота с наименьшими повреждениями. Это довольно важная работа, ведь стоимость роботов иногда составляет десятки тысяч долларов, а из-за одного несчастного случая можно потерпеть серьёзные убытки. К тому же, роботы гуманоидного типа всё чаще работают возле человека, в том числе возле пожилых людей и детей. Если он падает неоптимальным образом, то может просто ранить человека.
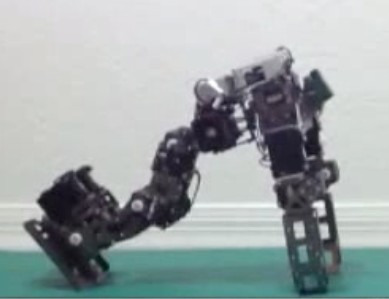
Алгоритм предусматривает оптимальную стратегию в ответ на большое количество разнообразных падений, в том числе падение от слабого тычка или от сильного удара, когда роботу приходится совершать серию кувырков. В любом случае, робот минимизирует урон. Алгоритм прошёл проверку в реальном эксперименте с роботом-гуманоидом BioloidGP (см. видео).
«Мы считаем, что роботы могут научиться падать безопасно, — говорит Сеюн Ха (Sehoon Ha), соавтор научной работы. — Наша работа объединяет существующие исследования об обучении роботов падению, предоставляя инструмент для автоматического определения общего количества контактов, очерёдности контактов, позиции и времени этих контактов. Всё это влияет на последствия падения и изменяет ответную реакцию робота».
Научная работа сделана на базе предыдущего исследования профессора Карен Лю (Karen Liu), где изучалась физика трансформации тела кошки при падении.
Из той работы было известно, что ключевым фактором является угол приземления. Роботы оснащены бортовыми компьютерами, но они изначально не приспособлены для решения задачи безопасного приземления, поэтому при падении не знают, что делать. Благодаря новому алгоритму в компьютере появится программа для вычисления необходимой последовательности действий, в зависимости от скорости и направления падения. Вычислительных мощностей достаточно, чтобы осуществлять вычисления на лету.
Научная статья “Multiple Contact Planning for Minimizing Damage of Humanoid Falls” (pdf) представлена в октябре на международной конференции Intelligent Robots and Systems в Гамбурге.
