Роботандем: у крохотного робота-трансформера STAR появился старший брат

Несколько лет назад ученые из Университета имени Бен-Гуриона создали компактного робота — Rising STAR (RSTAR). Сейчас у него появился напарник с аналогичной конструкцией — Big STAR (BSTAR), вот только, размер нового робота больше в 6 раз. Предполагается, что тандем увеличит производительность, улучшит универсальность роботов и сделает их менее уязвимыми. RSTAR и BSTAR станут применять использовать в поисково-спасательных операциях, когда требуется перемещение по бездорожью и пересеченной местности.
Роботов семейства STAR создал ученый Дэвид Заррук (David Zarrouk) с коллегами из Университета имени Бен-Гуриона. В своих первых разработках Заррук уделял максимум внимания автономности конструкций. Первые версии STAR получились действительно достаточно автономными и маневренными. Роботы легко трансформируются в зависимости от условий окружающей среды. Так, RSTAR имеет несущие винты — умеет облетать препятствия. Помимо этого, у робота есть надувные баллоны для плавания. Увидев, что конструкция получилась удачной, команда разработчиков решила пойти дальше. В итоге у RSTAR появился старший брат — BSTAR.
Особенности BIG STAR
Робот BSTAR обладает следующими характеристиками:
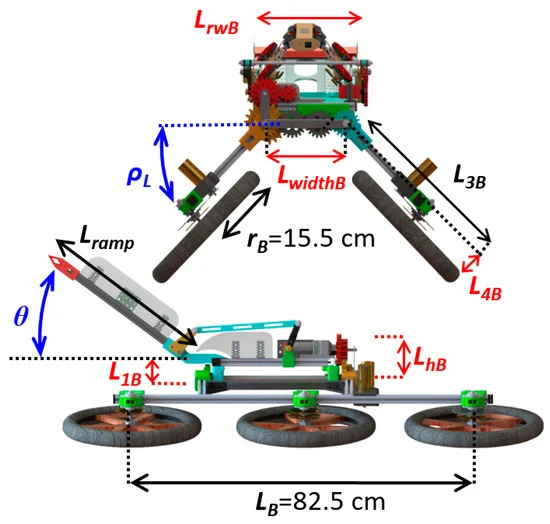
- скорость движения конструкции до 1,4 м/с;
- полезная нагрузка робота > 5 кг;
- длина конструкции от оси заднего колеса до оси переднего колеса — 82,5 см;
- выдвижной «хвост» для переноса RSTAR;
- раздвижная конструкция;
- минимальная высота в сложенном виде — 21 см;
- 2 литий-полимерных аккумулятора емкостью по 5200 мА *ч;
- масса — 9,8 кг.
Робот способен двигаться по пересеченной местности. Предполагается, что синергия BSTAR и RSTAR увеличит их навигационные возможности и способность преодолевать препятствия. Кроме того, большой робот может служить зарядкой для крохотного RSTAR.
Робот BSTAR подойдет для перевозки большого объема полезного груза: батарей, камер, коммуникационного оборудования и других датчиков для поисково-спасательных операций.
Робот управляется контроллером на Arduino Uno и двух контроллерах RobotClaw ECS.
Первая израильская звезда

Многофункциональный робот RSTAR появился в 2018 году. За счет адаптивного изменения конструкции он умеет передвигаться по горизонтальной и вертикальной поверхности, а также ползти или ездить на колесах. Робот быстро адаптируется к внешним условиям: может менять угол между колесными рамами, перемещать их параллельно корпусу вперед и назад.
Помимо этого, RSTAR умеет менять центр тяжести. Может заехать на слишком высокое для него препятствие, а потом перенести центр и благополучно его преодолеть.
Благодаря тому, что робот имеет механизм выдвижения с четырьмя стержнями, он может увеличивать расстояние между корпусом и ногами и передвигаться между стен.
Для увеличения мобильности робота можно оснащать колесами или опорами со спицами. Он может бегать вверх ногами и с помощью черепашьей походки переползать через препятствия превышающие по высоте диаметр его колес.
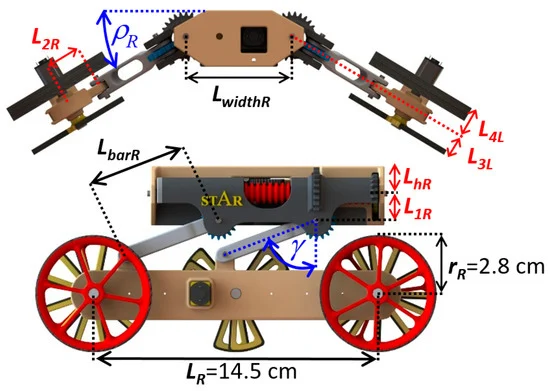
Робот оснащен одним LiPO-аккумулятором емкостью 800 мА*ч, но в планах — сделать его более автономным. Минимальная высота маневренного робота составляет 3,5 см, поэтому он может перемещаться по очень узким и труднодоступным местам. Максимальная скорость робота — до 0,8 м/с. Масса конструкции — 0,38 кг.
Союз двух звезд
С одной стороны, BSTAR и RSTAR имеют аналогичные конструкции, только выполненные в масштабе 6 к 1. Однако из-за больших размеров BSTAR некоторые его части пришлось заменить.
В BSTAR используют металлический каркас, в то время как у RSTAR — пластиковый.
Важным новым элементом конструкции робота является его выдвижной «хвост» — подвижная площадка в задней части. Площадка может изменять угол наклона в отрицательную и положительную стороны. Основное предназначение «хвоста» — перевозить крохотного RSTAR. Всего на родительской площадке может уместиться 3 «роборебенка».
Площадка может применяться в разных случаях для дополнительных маневров. Например, RSTAR, заезжая на площадку BSTAR, способен осматривать препятствия с высоты.
Как и говорилось выше, малютка заряжается от аккумулятора своего «родственника».
По задумке коллаборация двух многофункциональных роботов должна значительно повысить их производительность, универсальность, увеличить скорость исследования местности и расширить спектр возможных операций.

