Робот «Ветер». Open Source в роботехнике
Всем знакома система Raspberry Pi, которая по праву получила признание, не только со стороны профессиональной братии, но и одиночек-самоделкиных. Сейчас разговор пойдет ещё об одном интересном проекте в сфере роботехники.
Veterobot — это небольшой робот-вездеход, особенность которого в открытости технологии изготовления и программного обеспечения.

Небольшой, аккуратный робот буквально напичкан сенсорами и имеет достаточно мощный процессорный блок. Ядром последнего является бортовой компьютер BeagleBoard-xM. Это открытая система с процессором ARM производства фирмы Texas Instruments. Его мощности хватает для управления периферией, выполнения сложных алгоритмов и даже сжатия видео в формат H-264 в реальном времени (с использованием DSP). Последнее очень даже необходимо в виду того, что на борту аппарата имеется две видеокамеры, которые можно использовать для контроля движения.
Вообще в начинке робота изначально уже имеется четыре ультразвуковых дальномера, цифровой компас, GPS и видеокамеры. Управление может выполняться через WLAN или 3G (пока в тестовом режиме), а также имеется возможность удаленного управления роботом через сеть Интернет (для этого как раз и понадобятся бортовые камеры).
Все компоненты аппарата открыты и доступны для всех желающих. Поэтому возможности данного робота ограничиваются только фантазией пользователя.
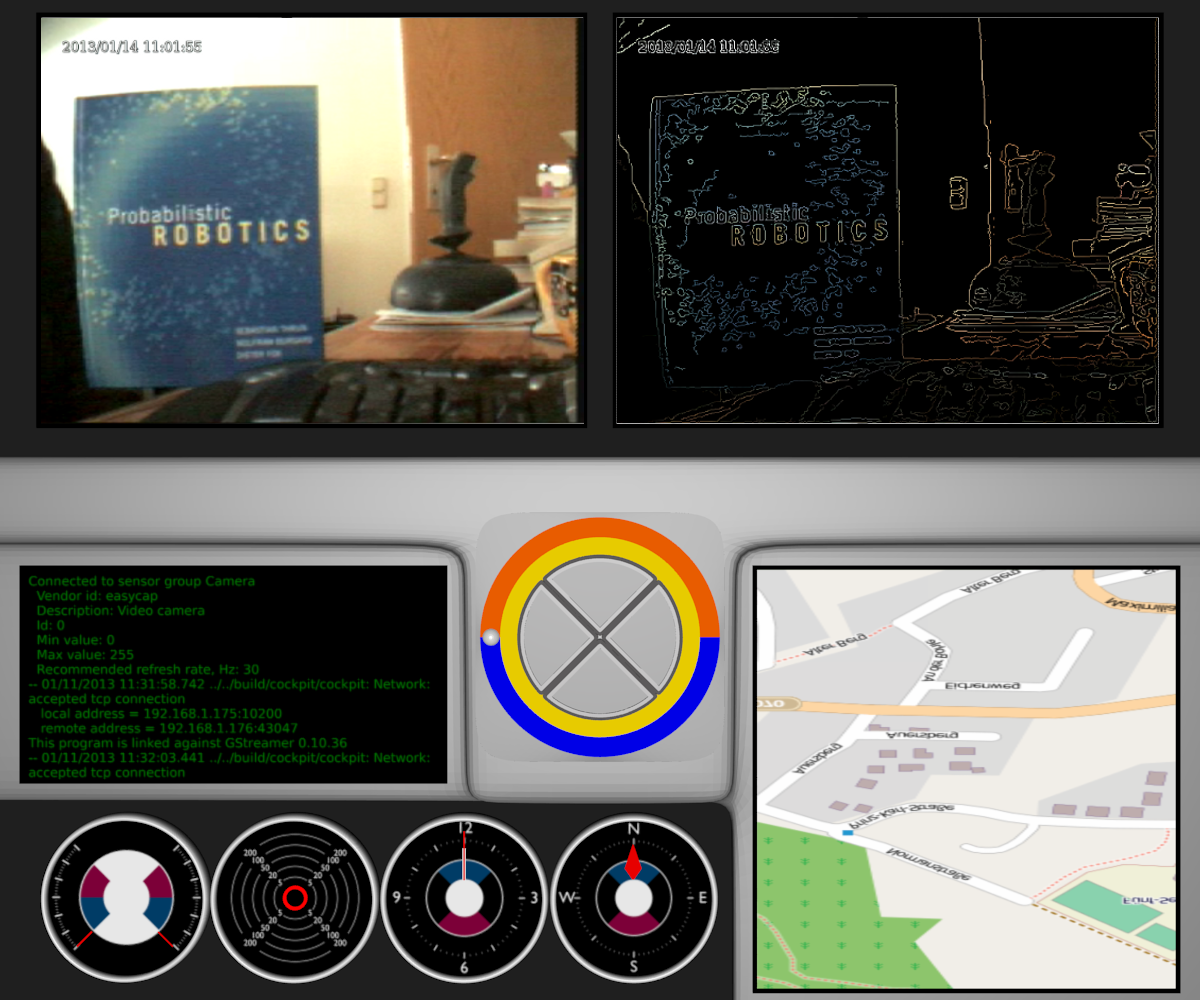
Программная начинка робота состоит из смеси Angstrom Linux, Xenomai, ZeroC’s Ice и прочих компонентов. Также в комплекте идет специальная программа, позволяющая управлять аппаратом и контролировать показания сенсоров. Ее рабочее окно на скриншоте ниже.
Для создания корпуса Veterobot`а применяется технология трехмерной печати, а сами модели были выполнены в программе Blender. Исключение составляет готовое шасси Dagu Rover 5, которое оснащено двумя моторами с датчиками угла поворота. Но, вероятно, что к аппарату могут быть присоединены другие комплектующие. По крайне мере, в 3D презентации робота есть возможность смены шасси, хотя на сайте упоминания об этом я не встретил. Само приложение также было сделано с помощью свободного 3D движка Blend4Web (презентация открывается в веб-браузере и использует WebGL), а исходники находятся в общем пуле проекта.

В итоге, получился интересный аппарат, который может понравиться исследователям или энтузиастам роботехники. Хотя стоимость устройства достаточно велика, но его составляющие, схемы, 3D модели и прочее доступно для скачивания в репозитории git-hub, а на самом сайте есть инструкция для самостоятельной сборки.
P.S. К разработчикам устройства автор статьи не имеет никакого отношения.
