Ретроспектива развития тягового привода железнодорожных экипажей
Формальной причиной появления этой статьи стала недавняя замечательная публикация «Электрический путь в век скоростей» в которой автор изложил исторические факты о первых, весьма не робких, шагах в развитии высокоскоростного железнодорожного сообщения, предпринятых в Германии в конце XIX начале XX века. Мне, как человеку некоторым образом связанному с железнодорожным транспортом, упомянутая статья понравилась тем, что она осветила, пусть и в публицистической форме, историю первого применения асинхронного двигателя в качестве тягового двигателя железнодорожного экипажа. Впечатляет и масштаб рекорда скорости, достигнутого электровагоном AEG — ведь, на минуточку, дело было в 1903 году! Такой успех технически во многом обусловлен применением именно бесколлекторного двигателя переменного тока.
Возникает вопрос — почему, показав столь впечатляющий результат, асинхронный тяговый двигатель исчез со сцены почти на столетие, уступив место коллекторному двигателю постоянного тока? Причин этому много, и главная из них — отнюдь не тройной токоприемник, как могло бы показаться. На этот вопрос я и постараюсь ответить в этой статье.
1. Двигатель, как преобразователь механической энергии
Начнем, как положено, с определения: двигатель — это преобразователь энергии первичного источника в энергию механического движения. Вне зависимости от того, что является первичным источником энергии, эффективность любого двигателя определяется двумя основными показателями — его номинальной мощностью и коэффициентом полезного действия (КПД). Между КПД η и мгновенной механической мощностью P2, развиваемой двигателем, существует весьма любопытная зависимость
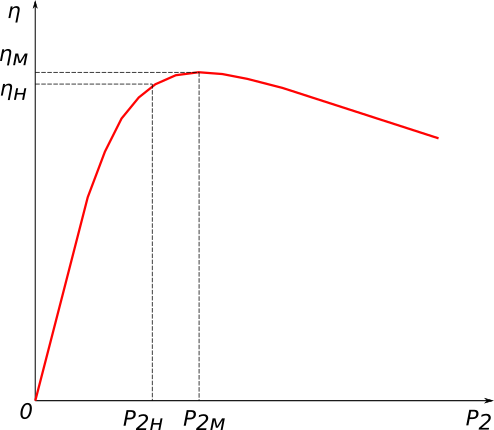
говорящая нам о том, что максимальный КПД ηм, а соответственно и минимальные потери энергии, потребляемые от первичного источника, достигается обычно при реализации двигателем мощности, близкой к номинальной.
Отсюда легко делается вывод, что идеальным, с точки зрения минимизации потерь, является работа двигателя в режиме реализации постоянной мощности, близкой к номинальной. Этот принцип хорошо подходит для приводов, работающих в постоянном диапазоне скоростей и нагрузок. Подавляющее большинство промышленных механизмов, в которых требуется применение электрического привода удовлетворяют этому условию.
Иначе дело обстоит в тяговом приводе транспортных средств (в том числе и железнодорожных экипажей), где диапазон реализуемых скоростей движения и нагрузок может варьироваться в весьма широких пределах. Учитывая, что большинство эксплуатируемых двигателей в преобразуют энергию первичного источника во вращательное движение, можно рассмотреть известную со школьной скамьи зависимость

где P2 — мгновенная механическая мощность на валу двигателя; M — мгновенный момент, развиваемый двигателем; ω — угловая скорость вращения вала двигателя. Тогда, исходя из условия обеспечения постоянной механической мощности, равной номинальной, мы придем к выводу, что момент, развиваемый двигателем должен находиться в обратной пропорции к скорости вращения его вала

которая выражается в виде гиперболической части кривой, приведенной на графике ниже.

Если обеспечить регулирование момента двигателя в соответствии с зависимостью (1), то на гиперболическом участке данной характеристики, увеличение нагрузки на привод будет приводить к снижению угловой скорости его вращения, с одновременным увеличением развиваемого момента, и наоборот — уменьшение нагрузки приведет к увеличению скорости вращения двигателя при пропорциональном снижении момента. При этом будет обеспечиваться наиболее эффективный режим работы на постоянной мощности.
Безусловно, при этом существуют как минимум два ограничения — по максимальному моменту, который способен развить двигатель данного типа, а так же по максимальной скорости вращения его вала, которую обуславливают динамические свойства самого двигателя, и того механизма, который он приводит в движение. Зависимость, изображенную на рисунке принято называть тяговой характеристикой привода.
При внешней похожести и смысле, не следует путать тяговую и естественную механическую характеристики двигателя, хотя по сути это одно и то же, с той лишь разницей, что тяговая характеристика является искусственной механической характеристикой, форма которой обусловлена законом управления двигателем в приводе. Естественная механическая характеристика, которая для электрического двигателя рассчитывается и строится при условии его прямого включения в питающую сеть может существенно отличатся от тяговой характеристики, которую следует обеспечить. Более того, для большинства известных типов электрических машин так оно и есть, за одним, очень важным, исключением. Это исключение и определило, на долгие годы, вектор развития тягового привода железнодорожных экипажей, но обо всем по порядку.
Для тягового привода наземного транспорта, в том числе и железнодорожного, в тяговой характеристике может присутствовать еще одно ограничение — ограничение по сцеплению движителя с опорной поверхностью. Для железнодорожной техники — ограничение по сцеплению колес с рельсами. В этом случае, типовая тяговая характеристика железнодорожного экипажа будет иметь такой вид
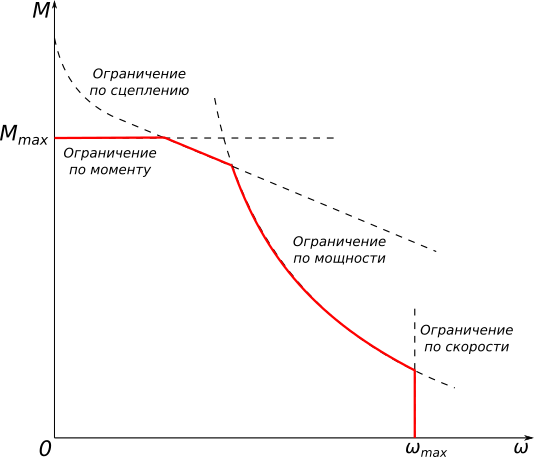
Такая форма тяговой характеристики характерна для мощных локомотивов, в большинстве случаев грузовых, или пассажирских, предназначенных для вождения длинных поездов по сложному профилю, и имеющих тяговые возможности, достаточные для нарушения сцепления колес с рельсами. Для большинства серий моторвагонного подвижного состава, в виду применения распределенной по всему поезду тяги, ограничение по сцеплению, чаще всего, лежит выше ограничения по максимальному моменту, и тогда в качестве тяговой характеристики мы имеем кривую с предыдущего рисунка.
В любом случае, приведенные кривые, характеризуют главные свойства тягового привода подвижного состава — обеспечивать регулирование тягового момента, в зависимости от текущей скорости движения, с целью обеспечения постоянной мощности на валах тяговых двигателей. Вопрос только в том, какой двигатель вполне удовлетворяет этим условиям?
2. «Жесткая» и «мягкая» механические характеристики двигателя
Двигатели (будем понимать под двигателем теперь, разумеется электрический двигатель) можно классифицировать по характеру изменения скорости при изменении нагрузки на валу, разделяя их таким образом на двигатели с «жесткой» и «мягкой» естественной механической характеристикой.

Механическая характеристика называется «жесткой», если изменение момента нагрузки на валу двигателя приводит к незначительному изменению угловой скорости его вращения, что можно выразить условием

Механическая характеристика называется «мягкой», если изменение момента нагрузки на валу двигателя, приводит к существенному изменению и скорости его вращения

Нетрудно показать, что на гиперболической ветви тяговой характеристики, о которой мы говорили выше, в режиме реализации постоянной номинальной мощности, для малых отклонений момента и угловой скорости от номинального режима справедливо

что говорит нам о том, что тяговая характеристика является «мягкой». Соответственно, для её реализации на практике, с применением в приводе двигателя с «жесткой» естественной механической характеристикой, неизбежно применение системы управления приводом.
3. Асинхронный электродвигатель в качестве тягового в начале XX века
В теме асинхронной электрический машины, её конструкции и теории, отметились масса ученых и инженеров, в том числе и легендарный Никола Тесла, получивший в 1888 году в США патент на машину такого типа. Однако, жизнь идея такого двигателя получила после получения немецким ученым русского происхождения Михаилом Осиповичем Доливо-Добровольским патента на трехфазный асинхронный двигатель с короткозамкнутым ротором типа «беличья клетка» в 1889 году. Чуть позже, в 1890 году, им же разработана и система трехфазного тока для питания такого двигателя. Работал Михаил Осипович в той самой немецкой фирме AEG, за которой закрепился рекорд скорости электровагона в 210,2 км/ч, достигнутой в 1903 году.
Появление этого двигателя перевернуло мировую промышленность. Простая конструкция, а значит и высокая надежность, широкие возможности по реализации высоких мощностей сделали трехфазный асинхронный двигатель самым распространенным в промышленном электроприводе. Естественно, что железнодорожные инженеры сразу схватились за идею применения этого двигателя в качестве тягового. Однако, до массовой реализации их идей в конце XIX начале XX века было ещё далеко, и вот почему.
В простейшем случае, для установившихся режимов работы, естественная механическая характеристика асинхронного тягового двигателя (АТЭД) описывается так называемой формулой Клосса

где

так называемое скольжение ротора, вращающегося с угловой скоростью ω относительно магнитного поля статора, вращающегося с угловой скоростью ω0. Графически данную зависимость легко выразить кривой
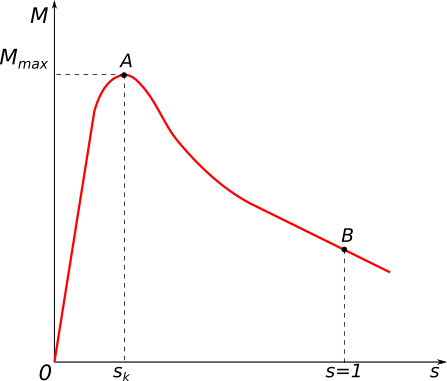
Участок OA — является рабочей частью характеристики, и характеризуется малой величиной скольжения s << 1. Участок BA двигатель быстро пролетает при пуске, при прямом включении в сеть, что обычно и реализуется для машин малой мощности. На участке BA работа двигателя обычно неустойчива, и характеризуется высокими потерями. Пусковому моменту соответствует точка B со скольжением равным 1.
Как нетрудно догадаться, рабочая часть механической характеристики асинхронного двигателя является «жесткой». Кроме того, при увеличении нагрузки на валу более Mmax, происходит потеря устойчивости привода, двигатель быстро останавливается, как принято говорить — «опрокидывается».
Поэтому, обеспечить режим реализации постоянной мощности на естественной характеристике АТЭД невозможно, а значит он непригоден для использования в качестве тягового без применения специальной системы управления моментом, которая позволила бы обеспечить требуемую для железнодорожного подвижного состава тяговую характеристику.
Управление же моментом АТЭД реализуется, в силу принципа его действия, путем регулирования амплитуды и мгновенной фазы питающего напряжения. По состоянию на 1903 год в распоряжении железнодорожников не было эффективных силовых преобразователей электрического напряжения, пригодных для решения этой задачи. Идею использовать асинхронную машину в качестве тяговой инженерам пришлось положить на полку.
4. Коллекторный двигатель постоянного тока, в качестве тягового
Коллекторная машина постоянного тока обладает различными свойствами, в зависимости от того, какая схема возбуждения используется при её работе.
При независимом (обмотки возбуждения и обмотки якоря питаются от разных источников) и параллельном возбуждении (когда обмотка возбуждения включена параллельно обмотке якоря), двигатель постоянного тока (ДПТ) имеет «жесткую» естественную механическую характеристику, и так же мало пригоден в качестве тяговой машины. Но всё меняется, если обмотку возбуждения и обмотку якоря соединить последовательно

На рисунке справа показана естественная механическая характеристика для ДПТ с последовательным (сериесным) возбуждением. Ничего не напоминает? Нет, конечно же это не гипербола, но кривая достаточно близкая к ней. Соответственно, при прямом включении в сеть, ДПТ с последовательным возбуждением приблизительно обеспечивает требуемый режим работы тягового привода. Конечно, при пуске тягового двигателя, он не сразу включается в сеть, а работает на искусственных, реостатных характеристиках — напряжение, подаваемое на двигатель ограничивается пусковыми реостатами, выводимыми из цепи, по мере разгона двигателя. К тому же, при использовании на локомотиве нескольких ТЭД, используют группировку тяговых двигателей, соединяя их последовательно (С-соединение), последовательно-параллельно (СП-соединение) и параллельно (П-соединение). В дополнение ко всему, на каждом виде соединения двигателей применяют несколько ступеней ослабления возбуждения ТЭД, путем шунтирования обмотки возбуждения резисторами.
Такая технология была доступна железнодорожным инженерам начала XX века. Она позволила достаточно гибко управлять мощностью тягового привода на электровозах и электропоездах. Именно поэтому первые линии, где эксплуатировался электрический подвижной состав стали электрифицировать постоянным током. В нашей стране напряжение в контактной сети постоянного тока было приято на уровне 1,5 кВт, по величине номинального напряжения ДПТ работавших в качестве ТЭД. Затем, довольно быстро, его подняли до 3 кВ. Были планы электрификации участков железных дорог на постоянном токе напряжением 6 кВ, но тут подоспели ртутные выпрямители (игнитроны), и железная дорога быстро перебралась на электрификацию однофазным переменным током с напряжением 25 кВ, как более перспективную для участков большой протяженности. Но трудился в электровозах переменного тока по прежнему старый добрый ДПТ с последовательным возбуждением.
ДПТ с последовательным возбуждением, дешево и сердито, без применения сложной системы управления позволял реализовывать требуемые подвижному составу тяговые свойства. Но при этом он обладает массой недостатков.
Сериесный тяговый двигатель, из-за своей «мягкой» естественной механической характеристики склонен к резкому увеличению скорости вращения, при снижении нагрузки на его валу. Без нагрузки такой двигатель вообще нельзя запускать — он пойдет «вразнос».
На железнодорожном транспорте это приводит к тому, что при снижении сцепления колес с рельсами начинается лавинообразный процесс проскальзывания колес — как говорят железнодорожники — «боксование». Сериесный ТЭД склонен к боксованию, именно поэтому локомотив везет на борту запас песка, который подают под колеса специальными песочными форсунками. Кроме того, применяют и меры по ликвидации боксования со стороны схемы управления приводом.
Другой недостаток этого двигателя связан с тем, что он коллекторный. Коллекторно-щеточный узел и так является довольно сложной и капризной частью двигателя. А при увеличении мощности, неизбежно увеличение и габаритов этого узла, а конкретно — диаметра коллектора. В противном случае возникают проблемы коммутации на коллекторе, приводящие в конечном счете к быстрому выходу всего узла из строя. Коллекторный ТЭД невозможно бесконечно масштабировать по мощности — настанет момент, когда двигатель просто не впишется в габарит тележки. Этот момент наступает при мощностях ТЭД свыше 1000 кВт.
 Электровоз ЧС200, часовой мощностью 8400 кВт, оснащен восемью сериесными ТЭД мощностью 1050 кВт
Электровоз ЧС200, часовой мощностью 8400 кВт, оснащен восемью сериесными ТЭД мощностью 1050 кВт
Из того подвижного состава, что эксплуатируют наши железные дороги, к этому пределу подошел электровоз ЧС200. Он оснащен поистине монструозными сериесными ДПТ мощностью аж 1050 кВт. Чешский двигатель 1AL-4741FLT является двигателем предельных для ж/д транспорта параметров. Дальнейшего ресурса увеличения осевой мощности у подвижного состава с коллекторными ТЭД нет и не может быть.
Инженерам стало понятно, хотя во времена электромоторисы AEG она и наверняка догадывались, что перешагнуть предел в тысячу киловатт способен только бесколлекторный тяговый двигатель переменного тока.
5. Возвращение джедая
Глазами инженера наших дней, цепочка преобразования энергии, пригодная для реализации управления моментом многофазного двигателя переменного тока выглядит элементарно.
Однофазный переменный ток из контактной сети преобразуется к требуемой величине напряжения тяговым трансформатором
Пониженное напряжение выпрямляется, обеспечивая так называемое «звено постоянного тока» напряжением 3 кВ. За это отвечает либо управляемый тиристорный выпрямитель, но чаще — 4-х квадрантный преобразователь.
Постоянное напряжение преобразуется в трехфазное напряжение с регулированием амплитуды и мгновенной фазы. Это реализуется с помощью управляемого автономного инвертора напряжения (АИН)
Если же линия, на которой эксплуатируется подвижной состав электрифицирована на постоянном токе, то это постоянное напряжение сразу подается на вход АИН.
Одна беда — реализация АИН крайне трудна без использования так называемых двухоперационных силовых ключей. Двухоперационными они называются, потому, что обеспечивают возможность как открытия, так и закрытия в любой момент времени, по желанию системы управления преобразователем.
Исторически первым полупроводниковым управляемым ключем стал силовой тиристор -, но это ключ однооперационный, так открыть его можно, а вот закрыть — надо ещё постараться, ибо тиристор закрывается только при снижении прямого тока ниже порогового значения. Однако, после появления достаточно качественных силовых тиристоров, на них стали строить автономные инверторы тока (АИТ) и автономные инверторы напряжения (АИН), которые сразу стали пытаться применять на подвижном составе для питания АТЭД. И эта вторая итерация, произошедшая спустя полвека после рекорда AEG, хоть и оказалась довольно неудачной, но принесла понимание того, что внедрение АТЭД на подвижной состав не за горами.
В нашей стране, традиционно отстававшей в области силовой электроники, тем не менее так же предпринимались попытки внедрить АТЭД на подвижной состав. Первой попыткой стал электровоз ВЛ80а, содержавший в себе макетную секцию с асинхронными тяговыми двигателями.
 Электровоз ВЛ80а-751 содержал в себе макетную секцию с асинхронным тяговым приводом
Электровоз ВЛ80а-751 содержал в себе макетную секцию с асинхронным тяговым приводом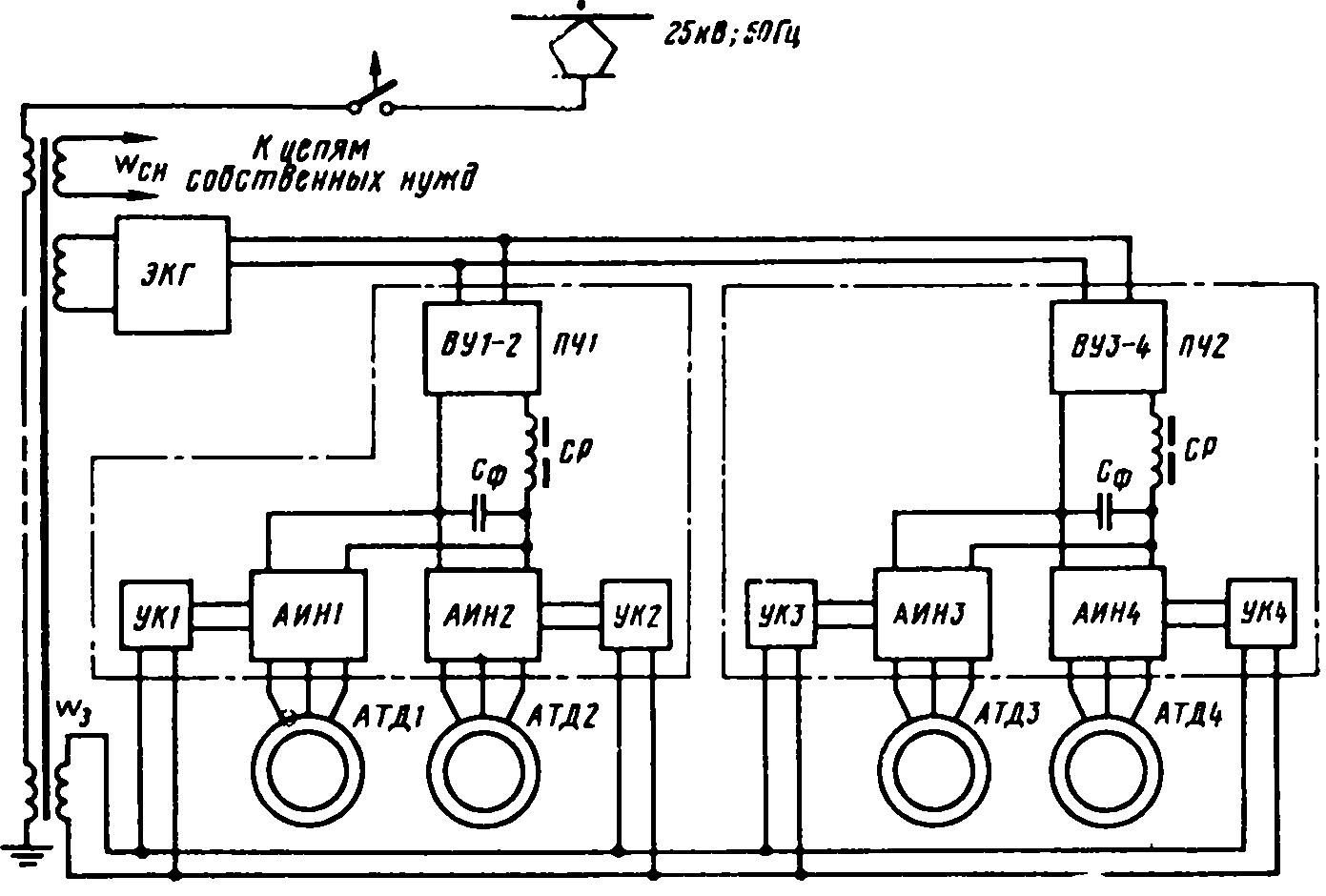 Структурная схема силовых цепей макетной секции электровоза ВЛ80а
Структурная схема силовых цепей макетной секции электровоза ВЛ80а
С появлением двухоперационных силовых ключей, которыми стали GTO-тиристоры, как за рубежом, так и в нашей стране, интерес к асинхронному тяговому приводу вспыхнул с новой силой. У нас это выразилось в создании (совместно с финской фирмой Кюми-Стрёмберг, поставлявшей тяговые преобразователи) опытного электровоза ВЛ86ф
 Электровоз ВЛ86ф-001 — самый мощный грузовой электровоз в мире, на момент своего создания
Электровоз ВЛ86ф-001 — самый мощный грузовой электровоз в мире, на момент своего создания
Этот электровоз пал жертвой распада СССР, так и не войдя в серию. Ваш покорный слуга имел честь лицезреть и трогать своими руками одну из его секций на испытательной станции НЭВЗ в 2008 году. В 2013 году эту секцию порезали на металлолом. Секция, оставшаяся на Щербинке прожила на 6 лет дольше и была утилизирована в 2019 году.
Тем не менее, за рубежом применение асинхронного привода на подвижном составе встало на широкую ногу. Не отставали и мы, с использованием опыта и при сотрудничестве с компанией Bombardier было построено 12 пассажирских электровозов ЭП10, с асинхронным тяговым приводом, с применением всё тех же GTO-тиристоров.
 Электровоз ЭП10–007 до сих пор эксплуатируется ОАО РЖД
Электровоз ЭП10–007 до сих пор эксплуатируется ОАО РЖД
Судьба этих машин неоднозначна. Электровоз в целом хорошо показал себя в эксплуатации и полюбился локомотивным бригадам. Но это касалось его характеристик как локомотива и качества системы управления. Существовал ряд проблем, из-за которых большая часть этих машин отставлены от работы. Две из них я наблюдаю за забором станции Ростов Главный на территории Ростовского электровозоремонтного завода.
В 2012 году в строй вступил электровоз ЭП20, который показан на КДПВ, но я приведу его фото ещё раз.
 ЭП20–001 — первая машина в серии
ЭП20–001 — первая машина в серии
Этот электровоз создан в консорциуме с французской компанией Alstom. В его силовой схеме уже содержаться 4-х квадрантные преобразователь и АИН, построенные на наиболее перспективных на сегодняшний день силовых ключах — IGBT-транзисторах.
ЭП20 был готов стать платформой для создания серии отечественных электровозов переменного и постоянного тока, как грузовых так и пассажирских, с асинхронным приводом. Одна машина, а именно грузовой электровоз 2ЭС5 «Скиф», в количестве 5 единиц была создан.
 2ЭС5–005 «Скиф» приписки депо Тимашевск
2ЭС5–005 «Скиф» приписки депо Тимашевск
Дороговизна импортной силовой электроники вынудила РЖД отказаться от «Скифа». Созданные машины успешно эксплуатируются по сей день в депо Тимашевская.
Намного больше повезло электровозу 2ЭС10 «Гранит», созданному компанией «Группа Синара» совместно с концерном Siemens. В разных модификациях на сегодняшний день выпущено 248 машин, успешно эксплуатируемых на участках железных дорог, электрифицированных постоянным током с напряжением в контактной сети 3 кВ.
 Электровоз 2ЭС10 «Гранит»
Электровоз 2ЭС10 «Гранит»
На смену ему уже создан и проходит испытания электровоз 2ЭС8 и его трехсекционный собрат 3ЭС8 («Малахит»), созданный уже с применением отечественных асинхронных двигателей и силовых преобразователей.
 3ЭС8 «Малахит» на испытаниях
3ЭС8 «Малахит» на испытаниях
Для линий переменного тока, на смену электровозу 2ЭС5 «Скиф» разработаны и проходят испытания электровозы 2ЭС5С и 3ЭС5С «Атаман»
 2ЭС5С на обкатном кольце Новочеркасского электровозостроительного завода
2ЭС5С на обкатном кольце Новочеркасского электровозостроительного завода
К сожалению, на сегодняшний день, среди парка отечественных электровозов, доля машин с двигателями переменного тока крайне низкая — выпущено серийно и эксплуатируется чуть более 300 машин. Однако, коллекторный двигатель начинает сдавать свои позиции, в пользу асинхронного, обладающего жесткой механической характеристикой, а значит менее склонного к боксованию. Легко достижимы мощности свыше 1000 кВт. Тяговые двигатели НТА-1200 (ЭП10) и ДТА-1200 (ЭП20) впервые превысили этот порог, развив осевую мощность в 1200 кВт. В этой связи, препятствием к повышению осевой мощности и силы тяги локомотива в нашей стране становится путь — рельс Р65 используемый повсеместно допускает максимальную нагрузку от колесной пары на рельсы не боле 24 тонн, что накладывает ограничение на так называемый сцепной вес — масса локомотива, приходящаяся на обмоторенные колесные пары. Восьмиосный грузовой электровоз не может весить более 192 тонн, что дает предел к развиваемому им тяговому усилию. Так что кроме проблемы управления, на пути развития асинхронного привода встают и проблемы инфраструктуры, которая не готова к серьезному повышению тяги локомотивов.
Заключение
Как видно, путь асинхронного двигателя, как тяговой электрической машины, во многом определялся развитием силовой электроники. Надежный и неприхотливый по конструкции, он оказался крайне капризным в плане управления, и прошел довольно тернистый путь к внедрению на подвижной состав.
Сейчас, как и почти 120 лет назад, понятно, что будущее принадлежит бесколлекторному приводу переменного тока и рано или поздно, сериесный ДПТ уйдет в прошлое.
