Порхающие дроны и москитный аэрофлот. О новом расцвете орнитоптеров
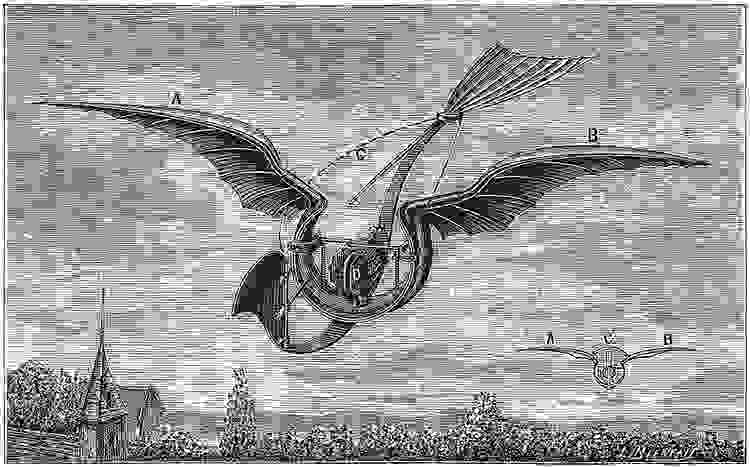
В моем блоге я неоднократно обращался к темам бионики — вот пара примеров. Бионика — это инженерная дисциплина, изучающая возможности заимствования технологических решений из живой природы. Как правило, бионика сводится к экзотическим проектам, годами пребывающим на стадии «proof-of-concept», но тем временем готовящим почву для локального технологического прорыва. Например, именно бионические разработки привели к созданию кевлара. Тем не менее, простое заимствование идей у природы порой заводит технологию в тупик на долгие годы — пока не удастся выйти из плоскости и абстрагироваться от неоптимального решения, полученного в ходе эволюции методом проб и ошибок. Но при этом бывает и так, что ниша для давнего полуигрушечного изобретения все-таки находится. Одним из таких изобретений является орнитоптер — летательный аппарат с машущими крыльями, а также близкий к нему мускулолет. Именно по принципу орнитоптера должен был действовать один из первых авиа-прототипов, изображенных на эскизах Леонардо да Винчи и на заглавной картинке к этой статье.
Не так давно я обнаружил на Хабре интереснейшие публикации пользователя @Ayasmarsaс ответами и вопросами на тему орнитоптера, датированные 2017 годом. Предположу, что тему стоит освежить и хочу рассмотреть, в каких нишах орнитоптер может быть полезен уже сейчас.
Некоторые исторические свидетельства, а также миф о Дедале и Икаре позволяют предположить, что первые попытки освоить полет были рассчитаны именно на одиночный (планирующий) полет изобретателя и функционально имитировали полет птиц, а впоследствии — рукокрылых. Тем не менее, уподобить человека птице по определению очень сложно, так как нелегко сымитировать искусственное перо с присутствующей в нем воздушной прослойкой (а также функциональными характеристиками маховых перьев). Кроме того, кости человека неполые, и поэтому слишком тяжелые по сравнению с птичьими. Наконец, человек не обладает килевой мускулатурой и такими точками на корпусе, к которым нормально прикреплялись бы крылья (с сохранением рук и плечевого пояса). Вот как резюмировал эти недостатки сэр Джордж Кейли (1773–1857), увлекавшийся конструированием аэростатов и интересовавшийся устройством орнитоптера:
Идея прикрепить крылья к рукам человека достаточно смехотворна, поскольку на грудные мышцы птицы приходится более двух третей всей ее мускульной силы, тогда как у человека те мышцы, которые могли бы приводить в движение прикрепленные к рукам крылья, не содержат и одной десятой всей мышечной массы человека. Не доказано, что в пересчете на вес человек значительно слабее птицы, поэтому представляется вероятным, что можно было бы выгодно перераспределить человеческую мускульную силу так, чтобы она прикладывалась к легкой подъемной поверхности, площадь которой относится к весу человека в той же пропорции, что и площадь крыла к весу птицы. Я совершенно уверен, что важность этого благородного искусства будет вскоре осознана человечеством, и мы сможем путешествовать по воздуху индивидуально и семьями. Такие полеты будут безопаснее, чем путешествия по воде, причем, удастся развивать скорость от 20 до 100 миль в час. При этом необходим лишь перводвигатель, который позволит в единицу времени генерировать больше мощности (пропорционально весу), чем мышечная система животного.
Краткая история пилотируемых орнитоптеров
Знаменитый орнитоптер Леонардо да Винчи, датируемый концом XV века, никогда не летал и, вероятно, даже не был собран, оставшись простым чертежом. Вероятно, Леонардо не рассчитал подъемной силы аппарата и не смог подобрать самые легкие материалы для конструкции. Тем не менее, он явно учитывал более ранние неудачные попытки полететь на искусственных крыльях, предпринятые «прыгунами» — энтузиастами, пытавшимися не взлететь с земли, как это сделал Дедал, а стартовать с башни. Так, известен опыт монаха Эльмера из английского Мальмсбери; авиатор сконструировал крылья, на которых пролетел около 200 метров, получил при падении травмы, но выжил. Но идею пилотируемого орнитоптера все-таки удалось воплотить сразу нескольким европейским изобретателям на рубеже XIX и XX веков — именно в тот период, который закончился вскоре после появления самолета, сконструированного братьями Райт в 1903 году. Наиболее заметные орнитоптеры условно «викторианской» эпохи подробно рассмотрены на сайте «On Verticality». Перечислю здесь некоторые из них:
 Орнитоптер Густава Трюве, взлетевший в 1893 году. Управлялся человеком, но приводился в движение пороховым двигателем, который сконструировал сам изобретатель.
Орнитоптер Густава Трюве, взлетевший в 1893 году. Управлялся человеком, но приводился в движение пороховым двигателем, который сконструировал сам изобретатель. Орнитоптер Отто Лилиенталя, одна из моделей, датируемая 1896 годом. Авиатор совершил более 2000 полетов, но погиб в 1896 году при одном из испытаний, упав с 15 метров из-за порыва ветра.
Орнитоптер Отто Лилиенталя, одна из моделей, датируемая 1896 годом. Авиатор совершил более 2000 полетов, но погиб в 1896 году при одном из испытаний, упав с 15 метров из-за порыва ветра. 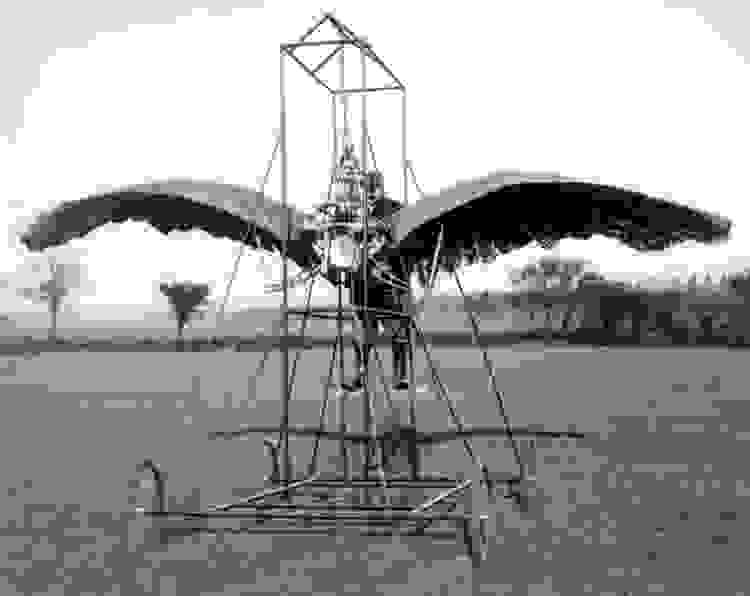 Орнитоптер Эдварда Фроста, оснащенный двигателем внутреннего сгорания (1902 год). Фрост постепенно оптимизировал эту конструкцию, сократив количество крыльев с трех пар до одной; тем не менее, сложно сказать, осуществил ли он контролируемый полет, либо у него получились лишь длинные прыжки.
Орнитоптер Эдварда Фроста, оснащенный двигателем внутреннего сгорания (1902 год). Фрост постепенно оптимизировал эту конструкцию, сократив количество крыльев с трех пар до одной; тем не менее, сложно сказать, осуществил ли он контролируемый полет, либо у него получились лишь длинные прыжки.
Сам миф о Дедале и Икаре — это история о крайне ненадежной летательной конструкции, созданной гениальным инженером. Малоизвестно, почему Дедал и Икар решились на столь опасный побег с Крита; дело в том, что именно Дедал спроектировал дворец-Лабиринт, в котором жил Минотавр — и поэтому царь Минос держал архитектора в плену, чтобы тот не разгласил никому схему Лабиринта. Маршрут Дедала и Икара известен — Дедал долетел с Крита на Сицилию, расстояние между этими островами составляет 998 км. В 1988 году команда студентов и ученых из Массачусетского технологического института, вдохновившись подвигом Дедала, , оснащенный машущими крыльями и весивший всего 31 кг. Аппарат представлял собой аналог велосипеда, не только с крыльями, но и со стабилизирующим хвостом; пилотировал его Канеллос Канеллопулос, 30 лет, многократный чемпион Греции по велогонкам. Каннелопулос смог благополучно добраться с Крита на остров Санторин, преодолев расстояние в 119 км; впрочем, на подлете к острову хвост аппарата сломало встречным ветром, так что Каннелопулосу повезло остаться в живых. Остается добавить, что «Daedalus 88» был аналогом «Daedalus 87», который разбился при тренировочном полете в феврале того же 1988 года на озере Роджерс (пустыня Мохаве, штат Калифорния), где находится исследовательский полигон NASA.

Этот пример кажется мне классическим «исключением, подтверждающим правило» — практика показала, что пассажирский управляемый орнитоптер непрактичен и опасен, поскольку человек — очень тяжелая «полезная нагрузка», требующая утяжелять всю конструкцию, а птичье крыло — не только легкий, но и очень подвижный орган, конфигурация крыла постоянно меняется в ходе полета.
Тем не менее, идея орнитоптера получает новый импульс, если реализовать ее не в виде самолета, а в виде беспилотного летательного аппарата (далее БЛА). Обратите внимание: аппараты да Винчи и Трюве напоминают по форме крыльев не столько птицу, сколько летучую мышь или дракона. Кроме того, крылья орнитоптера могут функционально имитировать не только летательный аппарат птицы или летучей мыши, но и крылья насекомых, описывая при движении восьмерку — подобно стрекозьим. Для «инсектоподобных» аппаратов существует название «энтоптер».
Динамика машущих крыльев: колибри, шмель, стрекоза
У самолета «разделена ответственность» за две ключевых составляющих полета — тягу и подъемную силу. Для тяги используется двигатель, а для обеспечения подъемной силы — аэродинамическая плоскость (крыло). Именно благодаря подъемной силе объект остается в воздухе. Птичьи крылья дают тягу и подъемную силу одновременно, поэтому птице приходится активно менять форму крыла, сочетая маховые движения (преобладает тяга) и парение (преобладает подъемная сила). Большинство птиц умеют подхватывать воздушные потоки и таким образом экономить силы, даже спать в полете.
Верхняя поверхность птичьих крыльев обладает характерной кривизной, именно поэтому при полете над крылом создается область низкого давления, а под крылом — область более высокого. Поэтому, чем меньше птица, тем активнее и быстрее ей удается маневрировать, меняя положение крыла и взаимное расположение этих областей.
Вот упрощенная схема маховых движений колибри:

Маховые движения летучих мышей более частые и (казалось бы) беспорядочные, чем у птиц. Тем не менее, испытания в аэродинамической трубе показывают, что рукокрылые — более эффективные летуны, чем птицы. Высокая маневренность и подъемная сила у рукокрылых достигаются не только за счет быстрых машущих движений, но и благодаря подвижности пальцев, а также ценой заметной атрофии задних лапок. Летучие мыши не умеют взлетать с земли, при этом, известно всего несколько видов летучих мышей, способных ходить (спойлер: вампир умеет не только ходить, но даже бегать). Аналогичный ход — пожертвовать лапками — наблюдается и у некоторых птиц, в особенности у фрегатов, проводящих большую часть жизни над водой.
Крылья насекомых, напротив, никакой кривизны не имеют, они плоские и обычно очень тонкие. Большинство насекомых создают подъемную силу стремительными движениями в вертикальной плоскости. Этот механизм насколько сложно воспроизвести механически, что до середины XX века сохранялось убеждение, будто шмель летает вопреки законам аэродинамики. Моделирование показало, что полет шмеля действительно не похож ни на полет птиц, ни на полет других насекомых, поскольку подъемная сила достигается не за счет аэродинамической плоскости крыльев, а благодаря тончайшей вибрации крыльев, создающих вокруг шмеля вихревые потоки. В этом отношении шмель сближается с вертолетом.

Еще более затейливо работают крылья у стрекозы, здесь нам ней обойтись без гифки.

Стрекоза — древний агрессивный воздушный хищник, поэтому логично, что у нее было больше всего времени на развитие формы и динамики крыльев, а естественный отбор поддерживал, прежде всего, развитие скоростных и маневренных показателей крыла. Крылья стрекозы вычерчивают восьмерку (каждая пара — свое кольцо) и рассчитаны не только на закладывание крутых виражей в погоне за добычей, но и на «боевые вылеты» — то есть, на авиационные дуэли с другими стрекозами. Именно поэтому площадь крыльев у стрекозы доведена до максимальной, а сами они настолько тонкие, что фактически представляют собой бионический аналог слюды и даже не заживают. При этом стрекоза может резко менять скорость полета и надолго зависать в воздухе. Как подробно разобрано в этой статье, две пары стрекозьих крыльев функционально не являются ни крылом самолета, ни винтом вертолета, а представляют собой отдельный механизм, который вполне реализуем на базе дрона.

Дроны-орнитоптеры
Рассмотрим, по каким показателям дроны с машущими крыльями могут конкурировать с современными коптерами, как правило, оснащаемыми одним или несколькими винтами вертолетного типа.
Дроны самолетного и вертолетного типа, вполне обычные в настоящее время, уже приближаются к своей предельной эффективности (во многом потому, насколько хорошо они изучены и оптимизированы). При этом дроны-орнитоптеры явно могли бы поспорить с ними как в преодолении больших расстояний, так и в маневрировании в тесном помещении. Орнитоптер не так шумен, как квадрокоптер и значительно менее опасен, поскольку крылья машут значительно медленнее, чем вращается пропеллер. Пользователь @ayasmarsa, занимающийся конструированием орнитоптеров, в первом своем посте на Хабре указывал на сложности, связанные с созданием именно тяжелых пилотируемых орнитоптеров, масса которых превышает 40 кг. Тем не менее, в своем последнем на данный момент посте он демонстрирует видео двух крупных махолетов, «Serenity» и «FlapFlyer», которые (как можно судить по тексту) превышают массу 40 кг и оснащены двумя парами крыльев, рисунок движения которых сильно напоминает динамику крыльев стрекозы. Логично предположить, что миниатюрные дроны стрекозиного типа как раз обладали бы основными аэродинамическими достоинствами стрекозы, и превосходили бы винтокрылые дроны схожих параметров.
Самым сложным аспектом при проектировании дрона-орнитоптера оказалось создание надежного передаточного механизма. Притом, что крылья орнитоптера движутся значительно медленнее, чем винты квадрокоптера, двигатель орнитоптера получается тяжелым и громоздким, а преодолевать сопротивление воздуха (ветра) должен не менее успешно, чем двигатель квадрокоптера. Постоянное переключение передач в орнитоптере чревато расшатыванием и дребезгом мелких деталей, что существенно усложняет установку любой сложной электроники или оптики на орнитоптере. Возвращаясь к мощной грудной и килевой мускулатуре птиц, признаем, что синтетические материалы для орнитоптера должны быть максимально легкими, прочными и эластичными, но все равно маловероятно, что они смогут сравниться по параметрам с мускулатурой птиц или насекомых. Предположу, однако, что в перспективе такие материалы можно выращивать. Дистанционное управление орнитоптером — фактор, лишь повышающий требования к прочности корпуса, системы передач, а также к длительности работы батареи. Все эти требования, опять же, выполнимы ценой утяжеления конструкции.
Еще один аспект, отличающий орнитоптер от живого летуна, заключается в том, что практически все управляющие функции машины перекладываются на хвост (а у птиц распределяются между хвостом и крыльями). Поэтому площадь хвоста у орнитоптера приходится увеличивать, а геометрию — усложнять. Динамику крыльев удается серьезно улучшить, именно уподобляя модель стрекозе, как в этой модели
разработанной в 2020 году китайскими и тайваньскими инженерами. Аппарат может взлетать, резко задирая нос и увеличивая угол атаки; в такой период крыло не генерирует подъемной силы, возникает так называемое «динамическое сваливание». При динамическом сваливании крыло фактически играет роль парашюта и позволяет контролируемо замедлять аппарат. Удалось добиться, чтобы такой орнитоптер быстро входил в режим динамического сваливания и быстро выходил из него — поэтому значительно повысилась маневренность аппарата. Он смог быстро летать в захламленном помещении, уклоняясь от столкновений, садиться на поверхность минимальной площади и даже на «жердочку». Комбинация рулевых движений хвоста и периодических переходов в динамическое сваливание позволяет дрону-орнитоптеру парить, скользить, порхать, зависать в воздухе и, самое главное, осуществлять мягкую посадку «на аэродинамике», когда батарея уже серьезно разряжена.
Один из самых совершенных дронов-орнитоптеров, теоретически имеющихся в продаже и подтверждающих указанную здесь тенденцию к миниатюризации, является MetalFly BionicBird, который весит всего 10 грамм и летает в радиусе 100 метров.

Дрон оснащен фронтальными лампами, литий-полимерным аккумулятором и гибкими крыльями; способен летать в течение 8 минут. Существуют и аналогичные модели орнитоптеров — потяжелее и с более узким радиусом досягаемости, например, эта, летающая на 25–30 метров, максимальная длительность работы без подзарядки также составляет до 8 минут.
Таким образом, ключевыми показателями орнитоптеров, ради которых стоит развивать такую
технику, являются бесшумность, маневренность и длительность автономной работы, а также, возможно, потенциал сохранения живучести при сильно поврежденных крыльях. Если эта статья покажется Хабру интересной, то я попробую написать и продолжение к ней — о потенциальном использовании орнитоптеров на других планетах, прежде всего, на Марсе.
