Понижение рабочего напряжения процессора, или тюнинг Enhanced Intel SpeedStep
В современных десктопных и (в особенности) мобильных процессорах применяется целый рад энергосберегающих технологий: ODCM, CxE, EIST и др. Сегодня нас будет интересовать, пожалуй, самая высокоуровневая из них: гибкое управление частотой и напряжением процессорного ядра во время работы — Cool 'n' Quiet, PowerNow! у AMD и Enhanced SpeedStep (EIST) у Intel.Чаще всего пользователю компьютера или ноутбука достаточно просто включить (чаще — не выключать) поддержку той или иной технологии в BIOS и/или операционной системе — никакой тонкой настройки обычно не предусмотрено, хотя, как показывает практика, она может оказаться весьма полезной. В этой статье я расскажу о том, как можно управлять рабочим напряжением ядра процессора из операционной системы (на примере Intel Pentium M и FreeBSD), и зачем это может понадобиться.
Несмотря на большое количество руководств, редко где встречается обстоятельное описание технологии Enhanced SpeedStep с точки зрения операционной системы (а не конечного пользователя), особенно на русском языке, поэтому значительная часть статьи посвящена деталям реализации и носит в некоторой степени теоретический характер.
Надеюсь, статья окажется полезной не только пользователям FreeBSD: мы также немного коснемся GNU/Linux, Windows и Mac OS X. Впрочем, в данном случае конкретная операционная система имеет второстепенное значение.В прошлом году я проапгрейдил процессор в своем стареньком ноутбуке: поставил Pentium M 780 вместо штатного 735-го, добил до максимума, так сказать. Ноут стал больше греться под нагрузкой (за счет возросшего на 10 Вт тепловыделения); я не особо обращал на это внимание (разве что на всякий случай почистил и смазал кулер), но в один прекрасный день, во время длительной компиляции компьютер… просто выключился (температура таки-достигла критических ста градусов). Я вывел значение системной переменной hw.acpi.thermal.tz0.temperature в трей, чтобы понаблюдать за температурой и, если что, вовремя прервать «тяжелую» задачу. Но через какое-то время я потерял бдительность (температура всегда оставалась в пределах нормы), и все повторилось. В этот момент я решил, что больше не хочу ни постоянно опасаться аварийного выключения во время длительной нагрузки CPU и держать руку на Ctrl-C, ни насиловать процессор.
Обычно изменение штатного напряжения подразумевает его повышение с целью обеспечить стабильную работу процессора при разгоне (т.е. на повышенной частоте). Грубо говоря, каждому значению напряжения соответствует некоторый диапазон частот, на которых он может работать, и задача оверклокера — найти максимальную частоту, на которой процессор еще не «глючит». В нашем случае задача стоит в некотором смысле симметричная: для известной частоты (точнее, как мы вскоре выясним, набора частот) найти наименьшее напряжение, обеспечивающее стабильную работу CPU. Понижать же рабочую частоту не хочется, чтобы не потерять в производительности — ноут и так уже далеко не топовый. Кроме того, понижать напряжение выгоднее.
Немного теорииКак известно, тепловыделение процессора пропорционально его емкости, частоте и квадрату напряжения (кому интересно, почему это так, могут попробовать вывести зависимость самостоятельно, рассмотрев процессор как набор элементарных CMOS-инверторов (логических отрицателей), либо сходить по ссылкам: раз, два, три).Современные мобильные процессоры могут потреблять до 50–70 Вт, которые в итоге рассеивают в тепло. Это очень много (вспомните лампы накаливания), особенно для ноутбука, который в автономном режиме под нагрузкой будет «кушать» аккумулятор как та свинья апельсины. В условиях ограниченного пространства тепло, скорее всего, придется отводить активно, а это означает дополнительный расход энергии на вращение вентилятора кулера (возможно, нескольких).
Естественно, такое положение дел никого не устраивало, и производители процессоров стали думать, как бы оптимизировать энергопотребление (и, соответственно, теплоотдачу), а заодно и предотвратить процессор от перегрева. Интересующимся рекомендую к прочтению ряд замечательных статей Дмитрия Беседина, а я тем временем перейду непосредственно к делу.
Немного истории Впервые технология SpeedStep (версия 1.1) появилась во втором поколении третьих пентиумов (производимые по .18 мкм техпроцессу мобильные Coppermine для ноутбуков, 2000 г.), которые в зависимости от нагрузки или источника питания компьютера — сеть или аккумулятор — могли переключаться между высокой и низкой частотами за счет переменного множителя. В экономном режиме процессор потреблял примерно вдвое меньше энергии.С переходом на .13 мкм техпроцесс технология получает номер версии 2.1 и становится «улучшенной» (enhanced) — теперь процессор умеет понижать не только частоту, но и напряжение. Версия 2.2 — адаптация для архитектуры NetBurst, а к третьей версии (платформа Centrino) технология станет официально называться Enhanced Intel SpeedStep (EIST).
Версия 3.1 (2003 г.) впервые применяется в первом и втором поколениях процессоров Pentium M (ядра Banias и Dothan). Частота варьировалась (сначала — лишь переключалась между двумя значениями) от 40% до 100% от базовой, с шагом 100 МГц (для Banias) или 133 МГц (для Dothan; наш случай). Одновременно Intel вводит динамическое управление емкостью кэша второго уровня (L2), что позволяет еще лучше оптимизировать энергопотребление. Версия 3.2 (Enhanced EIST) — адаптация для многоядерных процессоров с общим L2-кэшем. (Небольшой FAQ от Intel по технологии SpeedStep.)
Теперь, вместо того, чтобы слепо следовать многочисленным howto и туториалам, скачаем pdf’ку и попробуем разобраться в принципе работы EST (я буду дальше использовать эту аббревиатуру, т.к. она универсальнее и короче).
Как работает EST Итак, EST позволяет управлять производительностью и энергопотреблением процессора, причем динамически, во время его работы. В отличие от более ранних реализаций, которые требовали аппаратной поддержки (в чипсете) для изменения рабочих параметров процессора, EST позволяет программно, т.е. средствами BIOS или операционной системы, изменять множитель (отношение частоты процессора к частоте шины) и напряжение ядра (Vcc) в зависимости от типа источника питания компьютера, температурного режима CPU или настроек (политики) ОС.Во время работы процессор находится в одном нескольких состояний (power states): T (throttle), S (sleep), C (idle), P (performance), переключаясь между ними по определенным правилам (с. 386 спецификации ACPI 5.0).
 Каждый процессор, присутствующий в системе, должен быть описан в DSDT, чаще всего в пространстве имен \_PR, и обычно предоставляет ряд методов, через которые реализуется взаимодействие с операционной системой (драйвером PM) и которые описывают возможности процессора (_PDC, _PPC), поддерживаемые состояния (_CST, _TSS, _PSS) и управление ими (_PTC, _PCT). Нужные значения для каждого CPU определяются BIOS’ом материнской платы, который заполняет соответствующие таблицы ACPI (с. 11 pdf’ки) при загрузке машины.
Каждый процессор, присутствующий в системе, должен быть описан в DSDT, чаще всего в пространстве имен \_PR, и обычно предоставляет ряд методов, через которые реализуется взаимодействие с операционной системой (драйвером PM) и которые описывают возможности процессора (_PDC, _PPC), поддерживаемые состояния (_CST, _TSS, _PSS) и управление ими (_PTC, _PCT). Нужные значения для каждого CPU определяются BIOS’ом материнской платы, который заполняет соответствующие таблицы ACPI (с. 11 pdf’ки) при загрузке машины.
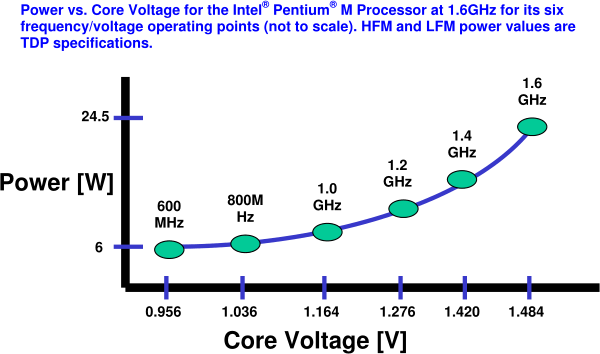
EST управляет работой процессора в P-состоянии (P-state), оно-то и будет нас интересовать. Так, Pentium M поддерживает шесть P-состояний (см. рис. 1.1 и таб. 1.6 pdf’ки), отличающихся напряжением и частотой:
 В общем случае, когда процессор заранее неизвестен, единственным более-менее надежным (и рекомендуемым Intel) методом работы с ним является ACPI. С конкретным процессором можно взаимодействовать напрямую, минуя ACPI — через регистры MSR (Model-Specific Register), с которыми можно работать непосредственно из командной строки: начиная с версии 7.2, во FreeBSD для этого используется утилита cpucontrol (8).
В общем случае, когда процессор заранее неизвестен, единственным более-менее надежным (и рекомендуемым Intel) методом работы с ним является ACPI. С конкретным процессором можно взаимодействовать напрямую, минуя ACPI — через регистры MSR (Model-Specific Register), с которыми можно работать непосредственно из командной строки: начиная с версии 7.2, во FreeBSD для этого используется утилита cpucontrol (8).
Узнать, поддерживает ли ваш процессор EST, можно, взглянув на 16-й бит в регистре IA_32_MISC_ENABLE (0×1A0), он должен быть установлен:
# kldload cpuctl # cpucontrol -m 0×1a0 /dev/cpuctl0 | (read _ msr hi lo; echo $((lo >> 16 & 1))) 1 Аналогичная команда для GNU/Linux (потребуется пакет msr-tools): # modprobe msr # echo $((`rdmsr -c 0×1a0` >> 16 & 1)) 1 Переход между состояниями происходит при записи в регистр IA32_PERF_CTL (0×199). Узнать текущий режим работы можно, прочитав регистр IA32_PERF_STATUS (0×198), который обновляется динамически (таб. 1.4 pdf’ки). В дальнейшем префикс IA32_ я буду для краткости опускать.Попробуем для начала прочитать текущее значение PERF_STATUS:
# cpucontrol -m 0×198 /dev/cpuctl0 MSR 0×198: 0×0612112b 0×06000c20 Из документации следует, что текущее состояние кодируется в нижних 16 битах (если выполнить команду несколько раз, их значение может меняться — это означает, что EST работает). Если посмотреть внимательнее на остальные биты, в них тоже явно не мусор. Погуглив, можно выяснить, что же они означают.Структура регистра PERF_STATUS Данные, читаемые из PERF_STATUS, представляются следующей структурой (положим, что данные хранятся как little-endian): struct msr_perf_status { unsigned A: 16; /* Current PSV */ unsigned B: 8; /* Status flags */ unsigned C: 8; /* Minimum multiplier */ unsigned D: 16; /* Maximum PSV */ unsigned E: 16; /* Power-on PSV */ }; A, D, и E — это 16-битные, так называемые Performance State Values (PSV), их структуру мы рассмотрим ниже. A — это текущее значение PSV, D — максимальное (зависит от процессора), E — значение на старте системы (при включении). Текущее значение (A), очевидно, меняется при изменении режима работы, максимальное (D) обычно остается постоянным, стартовое значение (E) не меняется: как правило, оно равно максимальному значению для десктопов и серверов, но минимальному для мобильных CPU. C — это минимальный множитель, для процессоров Intel почти всегда равен шести. B содержит значение некоторых флагов, например, при наступлении событий EST или THERM (т.е. в момент изменения P-состояния или перегрева процессора, соответственно).Теперь, когда мы знаем назначение всех 64 бит регистра PERF_STATUS, мы можем расшифровать прочитанное выше слово: 0×0612112b 0×06000c20 ⇒ PSV на старте 0×0612, максимальное значение 0×112b, минимальный множитель 6 (как и ожидалось), флаги сброшены, текущее значение PSV = 0×0c20. Что именно означают эти 16 бит?
Структура Performance State Value (PSV) Знать и понимать, что из себя представляет PSV, очень важно, ведь именно в таком виде задаются режимы работы процессора. struct psv { unsigned vid: 6; /* Voltage Identifier */ unsigned _reserved1: 2; unsigned freq: 5; /* Frequency Identifier */ unsigned _reserved2: 1; unsigned nibr: 1; /* Non-integer bus ratio */ unsigned slfm: 1; /* Dynamic FSB frequency (Super-LFM) */ }; Dynamic FSB frequency switching указывает пропускать каждый второй такт FSB, т.е. вдвое понижать рабочую частоту; эта возможность впервые реализована в процессорах Core 2 Duo (ядро Merom) и нас не касается, как и Non-integer bus ratio — специальный режим, поддерживаемый некоторыми процессорами, позволяющий, как следует из названия, более тонко управлять их частотой.К собственно технологии EST имеют отношения два поля — идентификаторы частоты (Frequency Identifier, Fid), который численно равен множителю, и напряжения (Voltage Identifier, Vid), который соответствует уровню напряжения (он же обычно и наименее документирован).
Идентификатор напряжения (Voltage Identifier)
Intel весьма неохотно раскрывает информацию (обычно требуется подписать NDA) о том, как именно кодируется идентификатор напряжения для каждого процессора. Но для большинства популярных CPU, к счастью, эта формула известна; в частности, для нашего Pentium M (и многих других): Vcc = Vid0 + (Vid × Vstep), где Vcc — текущее (действительное) напряжение, Vid0 — базовое напряжение (когда Vid == 0), Vstep — шаг. Таблица для некоторых популярных процессоров (все значения в милливольтах): Процессор
Vid0
Vstep
Vboot
Vmin
Vmax
Pentium M
700,0
16,0
xxxx, x
xxx, x
xxxx, x
E6000, E4000
825,0
12,5
1100,0
850,0
1500,0
E8000, E7000
825,0
12,5
1100,0
850,0
1362,5
X9000
712,5
12,5
1200,0
800,0
1325,0
T9000
712,5
12,5
1200,0
750,0
1300,0
P9000, P8000
712,5
12,5
1200,0
750,0
1300,0
Q9000D, Q8000D
825,0
12,5
1100,0
850,0
1362,5
Q9000M
712,5
12,5
1200,0
850,0
1300,0
Множитель (т.е. Fid) записывается в PSV сдвинутым на 8 бит влево, младшие шесть бит занимает Vid. Т.к. в нашем случае остальными битами можно пренебречь, то PSV, частота процессора, системной шины и физическое напряжение связаны простой формулой (для Pentium M):  Теперь рассмотрим регистр управления (PERF_CTL). Запись в него должна производиться следующим образом: считывается текущее значение (64-битное слово целиком), в нем изменяются нужные биты, и записывается обратно в регистр (т.н. read-modify-write).Структура регистра PERF_CTL
struct msr_perf_ctl {
unsigned psv: 16; /* Requested PSV */
unsigned reserved1: 16;
unsigned ida_diseng: 1; /* IDA disengage */
unsigned reserved2: 31;
};
IDA (Intel Dynamic Acceleration) disengage-бит позволяет временно отключать адаптивное (opportunistic) управление частотой (на процессорах Intel Core 2 Duo T7700 и более поздних, — опять же, нас не интересует). Младшие 16 бит (PSV) — режим, в который мы «просим» перейти процессор.Таблица _PSS
Таблица _PSS представляет собой массив состояний (Package в терминологии ACPI), либо метод, который возвращает такой массив; каждое состояние (P-state), в свою очередь определяется следующей структурой:
struct Pstate {
unsigned CoreFrequency; /* Core CPU operating frequency, MHz */
unsigned Power; /* Maximum power dissipation, mW */
unsigned Latency; /* Worst-case latency of CPU unavailability during transition, µs */
unsigned BusMasterLatency; /* Worst-case latency while Bus Masters are unable to access memory, µs */
unsigned Control; /* Value to be written to the PERF_CTL to switch to this state */
unsigned Status; /* Value (should be equal to the one read from PERF_STATUS) */
};
Таким образом, каждое P-состояние характеризуется какой-то рабочей частотой ядра, максимальной рассеиваемой мощностью, транзитными задержками (фактически это время перехода между состояниями, в течении которых недоступны CPU и память), наконец, самое интересное: PSV, которое соответствует данному состоянию и которое надо записать в PERF_CTL, чтобы в это состояние перейти (Control). Чтобы убедиться, что процессор успешно перешел в новое состояние, можно прочитать регистр PERF_STATUS и сравнить со значением, записанным в поле Status.EST-драйвер операционной системы «знает» про некоторые процессоры, т.е. сумеет ими управлять и без поддержки ACPI. Но это редкость, особенно в наши дни (хотя для undervolting’а на Linux, где-то до версии 2.6.20, надо было патчить таблицы в драйвере, и еще в 2011 г. этот метод был весьма распространен).
Теперь рассмотрим регистр управления (PERF_CTL). Запись в него должна производиться следующим образом: считывается текущее значение (64-битное слово целиком), в нем изменяются нужные биты, и записывается обратно в регистр (т.н. read-modify-write).Структура регистра PERF_CTL
struct msr_perf_ctl {
unsigned psv: 16; /* Requested PSV */
unsigned reserved1: 16;
unsigned ida_diseng: 1; /* IDA disengage */
unsigned reserved2: 31;
};
IDA (Intel Dynamic Acceleration) disengage-бит позволяет временно отключать адаптивное (opportunistic) управление частотой (на процессорах Intel Core 2 Duo T7700 и более поздних, — опять же, нас не интересует). Младшие 16 бит (PSV) — режим, в который мы «просим» перейти процессор.Таблица _PSS
Таблица _PSS представляет собой массив состояний (Package в терминологии ACPI), либо метод, который возвращает такой массив; каждое состояние (P-state), в свою очередь определяется следующей структурой:
struct Pstate {
unsigned CoreFrequency; /* Core CPU operating frequency, MHz */
unsigned Power; /* Maximum power dissipation, mW */
unsigned Latency; /* Worst-case latency of CPU unavailability during transition, µs */
unsigned BusMasterLatency; /* Worst-case latency while Bus Masters are unable to access memory, µs */
unsigned Control; /* Value to be written to the PERF_CTL to switch to this state */
unsigned Status; /* Value (should be equal to the one read from PERF_STATUS) */
};
Таким образом, каждое P-состояние характеризуется какой-то рабочей частотой ядра, максимальной рассеиваемой мощностью, транзитными задержками (фактически это время перехода между состояниями, в течении которых недоступны CPU и память), наконец, самое интересное: PSV, которое соответствует данному состоянию и которое надо записать в PERF_CTL, чтобы в это состояние перейти (Control). Чтобы убедиться, что процессор успешно перешел в новое состояние, можно прочитать регистр PERF_STATUS и сравнить со значением, записанным в поле Status.EST-драйвер операционной системы «знает» про некоторые процессоры, т.е. сумеет ими управлять и без поддержки ACPI. Но это редкость, особенно в наши дни (хотя для undervolting’а на Linux, где-то до версии 2.6.20, надо было патчить таблицы в драйвере, и еще в 2011 г. этот метод был весьма распространен).
Стоит отметить, что EST-драйвер может работать даже в случае отсутствия таблицы _PSS и неизвестного процессора, т.к. максимальное и минимальное значения можно узнать из PERF_STATUS (при этом, очевидно, число P-состояний вырождается в два).
Довольно теории. Что с этим всем делать? Теперь, когда мы знаем 1) назначение всех битов в нужных словах MSR, 2) как именно кодируется PSV для нашего процессора, и 3) где в DSDT искать нужные настройки, самое время составить таблицу частот и напряжений по умолчанию. Сдампим DSDT и поищем там таблицу _PSS. Для Pentium M 780 она должна выглядеть примерно так: Name (_PSS, Package (0×06) { // Всего определено 6 состояний (P-states) Package (0×06) { 0×000008DB, // 2267 MHz (cf. Fid × FSB clock) 0×00006978, // 27000 mW 0×0000000A, // 10 µs (соответствует спецификации) 0×0000000A, // 10 µs 0×0000112B, // 0×11 = 17 (множитель, Fid), 0×2b = 43 (Vid) 0×0000112B }, Package (0×06) { 0×0000074B, // 1867 MHz (82% от максимальной) 0×000059D8, // 23000 mW 0×0000000A, 0×0000000A, 0×00000E25, // Fid = 14, Vid = 37 0×00000E25 }, Package (0×06) { 0×00000640, // 1600 MHz (71% от максимальной) 0×00005208, // 21000 mW 0×0000000A, 0×0000000A, 0×00000C20, // Fid = 12, Vid = 32 0×00000C20 }, Package (0×06) { 0×00000535, // 1333 MHz (59% от максимальной) 0×00004650, // 18000 mW 0×0000000A, 0×0000000A, 0×00000A1C, // Fid = 10, Vid = 28 0×00000A1C }, Package (0×06) { 0×0000042B, // 1067 MHz (47% от максимальной) 0×00003E80, // 16000 mW 0×0000000A, 0×0000000A, 0×00000817, // Fid = 8, Vid = 23 0×00000817 }, Package (0×06) { 0×00000320, // 800 MHz (35% от максимальной) 0×000032C8, // 13000 mW 0×0000000A, 0×0000000A, 0×00000612, // Fid = 6, Vid = 18 0×00000612 } }) Итак, мы знаем дефолтные Vid для каждого P-уровня: 43, 37, 32, 28, 23, 18, что соответствует напряжениям от 1388 mV до 988 mV. Суть undervolting’а в том, что наверняка эти напряжения несколько выше, чем реально необходимо для устойчивой работы. Попробуем определить «границы дозволенного».Я написал для этого простой shell-скрипт, который постепенно понижает Vid и выполняет несложный цикл (демон powerd (8) перед этим, разумеется, необходимо прибить). Таким образом я определил напряжения, позволяющие процессору хотя бы не виснуть, затем прогнал несколько раз тест Super Pi и пересборку ядра; уже позже я поднял значение Vid для двух максимальных частот на один пункт, иначе gcc изредка вылетал из-за illegal instruction. В результате всех экспериментов в течении нескольких дней получился такой набор «стабильных» Vid: 30, 18, 12, 7, 2, 0.
Анализ результатов Теперь, когда мы эмпирически определили минимальные безопасные напряжения, интересно сравнить их с исходными: Частота (множитель) Vidold Vidnew Изменение Vcc 2267 (17) 43 30 -15% 1867 (14) 37 18 -24% 1600 (12) 32 12 -26% 1333 (10) 28 7 -29% 1067 (8) 23 2 -31% 800 (6) 18 0 -29% Понижение максимального напряжения даже на 15% принесло довольно ощутимые результаты: длительная нагрузка не только не приводит больше к перегреву процессора и аварийному отключению, температура вообще теперь почти никогда не превышает 80°. Прогнозируемое время работы от аккумулятора, судя по acpiconf -i 0, увеличилось с 1 ч. 40 м. до 2 ч. 25 м. (Не ахти как много, но литий-ионные элементы со временем «устают», а аккумулятор я не менял с момента покупки ноута лет семь тому назад.)Теперь надо сделать так, чтобы настройки применялись автоматически. Можно, например, модифицировать драйвер cpufreq (4), чтобы значения PSV брались из собственной таблицы, а не через ACPI. Но это неудобно уже хотя бы тем, что придется каждый раз патчить драйвер при обновлении системы, да и вообще — больше похоже на грязный хак, чем на решение. Можно, наверное, еще пропатчить powerd (8), что плохо примерно по тем же причинам. Можно просто запускать скрипт, понижая напряжение прямой записью в MSR (что, собственно, я и делал для определения «стабильных» напряжений), но тогда придется помнить о и самостоятельно обрабатывать переходы между состояниями (не только P-states, вообще любыми, например, при выходе ноутбука из сна). Тоже не дело.
Если мы получаем значения PSV через ACPI, то логичнее всего изменить именно таблицу _PSS в DSDT. К счастью, BIOS для этого ковырять не придется: FreeBSD умеет загружать DSDT из файла (про модификацию DSDT я уже как-то писал, поэтому сейчас подробно на этом останавливаться не буду). Заменяем нужные поля в DSDT, компилируем новый AML-файл (байткод ACPI) и прописываем в /boot/loader.conf:
acpi_dsdt_load=«YES» acpi_dsdt_name=»/root/undervolt.aml» Вот, в общем, и все. Единственное, не забудьте закомментировать эти две строчки в /boot/loader.conf, если будете менять процессор.Даже если вы не собираетесь понижать штатные напряжения, умение настраивать управление состояниями процессора (не только P-states) может пригодиться. Ведь нередко бывает, что «кривой» BIOS заполняет таблицы неверно, не полностью, или не заполняет их вовсе (например потому, что стоит целерон, а производитель официально не предусматривает его замену). В этом случае вам придется проделать всю работу самостоятельно. Обратите внимание, что добавить одну лишь таблицу _PSS может оказаться недостаточно; так, C-states задаются таблицей _CST, и кроме того, может потребоваться описать сами процедуры управления (Performance Control, _PCT). К счастью, это несложно и довольно подробно, с примерами, описано в 8-й главе спецификации ACPI.
Undervolting в GNU/Linux По правде говоря, сначала я думал, что мне достаточно будет прочитать Gentoo Undervolting Guide и просто адаптировать его для FreeBSD. Это оказалось не так-то просто, ибо документ на поверку оказался на редкость бестолковым (что вообще-то странно для Gentoo Wiki). К сожалению, на их новом сайте я ничего похожего не нашел, пришлось довольствоваться старой копией; и хотя я понимаю, что это руководство во многом потеряло актуальность, я все же его немного покритикую. :-)Мне почему-то сразу, без объявления войны, предлагается патчить ядро (во FreeBSD, на минуточку, нам вообще никакой системный код модифицировать не пришлось). Забивать во внутренности драйвера или записывать в какие-то init-скрипты значения неких «безопасных» напряжений, непонятно кем и каким образом полученные, из специальной таблицы (в которой Pentium M 780 издевательски представлен строкой, состоящей из одних вопросительных знаков). Следовать советам, среди которых есть написанные людьми, которые явно вообще не понимают, о чем говорят. А главное, совершенно неясно, почему и как именно эти магические замены одних цифр на другие работают; не предлагается способа «потрогать» EST, прежде чем что-то патчить и пересобирать ядро, ни разу не упоминаются регистры MSR и работа с ними из командной строки. Не рассматривается модификация таблиц ACPI как альтернативный и более предпочтительный вариант.
Еще более лаконично выглядит страница Arch Wiki. Вот эта строчка доставляет особенно:
# echo 34 26 18 12 8 5 > /sys/devices/system/cpu/cpu0/cpufreq/phc_vids Так и просятся лостовские »4, 8, 15, 16, 23, 42» (правда, в обратном порядке, что несколько портит шутку).Пожалуй, самое толковое описание всего процесса для Linux у Пата Эрлея, ссылку на которое я давал выше.
Undervolting в Windows и Mac OS X Про Windows особо говорить смысла нет; есть и софт, и обсуждения на форумах; поэтому лишь пара ссылок.Макось довольно плотно взаимодействует с (и рассчитывает на корректную работу) ACPI, и модификация таблиц — один из основных методов ее настройки под конкретное железо. Поэтому первое, что приходит в голову — точно так же сдампить и пропатчить свою DSDT. Альтернативный метод: google://IntelEnhancedSpeedStep.kext, например, раз, два, три.
Еще одна «чудесная» утилита (к счастью, уже устаревшая) предлагает купить за $10 возможность менять напряжение и частоту. :-)
Что еще почитать Для FreeBSD: тема на форуме, а также небезызвестное обсуждение в рассылке; исходное письмо Саши Мотина для удобства викифицировано. Для Linux можно начать с неплохой статьи в ArchWiki.Для тех, кто хочет углубиться в тему, кроме официальной документации производителей процессоров и приведенных в тесте ссылок, вот здесь — отличная подборка материалов (исследовательских статей, презентаций) по широкому кругу вопросов управления энергопотреблением (осторожно, Comic Sans).
