Подвижные голограммы: космический бой в наперстке
Если взглянуть на произведения из категории научная фантастика, то можно найти немало общих элементов. Конечно же, одним из самых явных являются невероятные технологии — роботы, космические корабли, стазис-камеры, и т.д. К лидерам по частоте появлений в кино, играх и фильмах можно с уверенностью причислить и голограммы. Праотцом голограмм считается, как неудивительно, Айзек Азимов, упоминающий эту технологию в цикле романов «Основание». Первым же кино-дебютом для голограммы стал фильм «Зардоз» 1974 года с Шоном Коннери в главной роли. С тех пор голограммы начали появляться практически во всех научно-фантастических фильмах до той степени, что эта технология перестала удивлять, а порой начала вызывать откровенную неприязнь своей невероятной универсальностью в качестве инструмента продвижения сюжета. Однако, несмотря на недовольное ворчание некоторых киноманов, ученые по всему миру испытывают живейший интерес к этой невероятной технологии. Группа исследователей из университета Бригама Янгам (США) создали новый вариант технологии визуализации голографических изображений, которые буквально оживают на глазах. Данный труд уже освещался на Хабре, но давайте рассмотрим его подробнее. В чем же секрет подвижных голограмм, в чем их особенность и как все это выглядит? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
Еще в 2018 году был опубликован труд (A photophoretic-trap volumetric display), в котором ученые описывают устройство для объемного отображения с помощью фотофоретического* треппинга (photophoretic trapping). Работа устройства основана на удержании частицы в фотофоретической ловушке, которая перетаскивает частицу через каждую активную точку изображения в свободном пространстве (до 1 см3).
Фотофорез* — явление, когда мелкие частицы, взвешенные в газе (аэрозоли) или жидкости (гидроколлоиды), начинают двигаться при освещении достаточно интенсивным светом. Причиной этого явления является неравномерное распределение температуры освещенной частицы в текучей среде.Когда частица перемещается в свободном пространстве, она освещается лазером видимого диапазона, чтобы сформировать изображение, которое может увидеть человек.
Данная технология нова и требует решения множества проблем, основными среди которых являются увеличение объема свободного пространства от 1 см3 до 100 см3 и устранения фундаментальной неспособности объемных дисплеев создавать виртуальные образы в свободном пространстве. Вторая проблема и стала главной задачей рассматриваемого нами исследования.
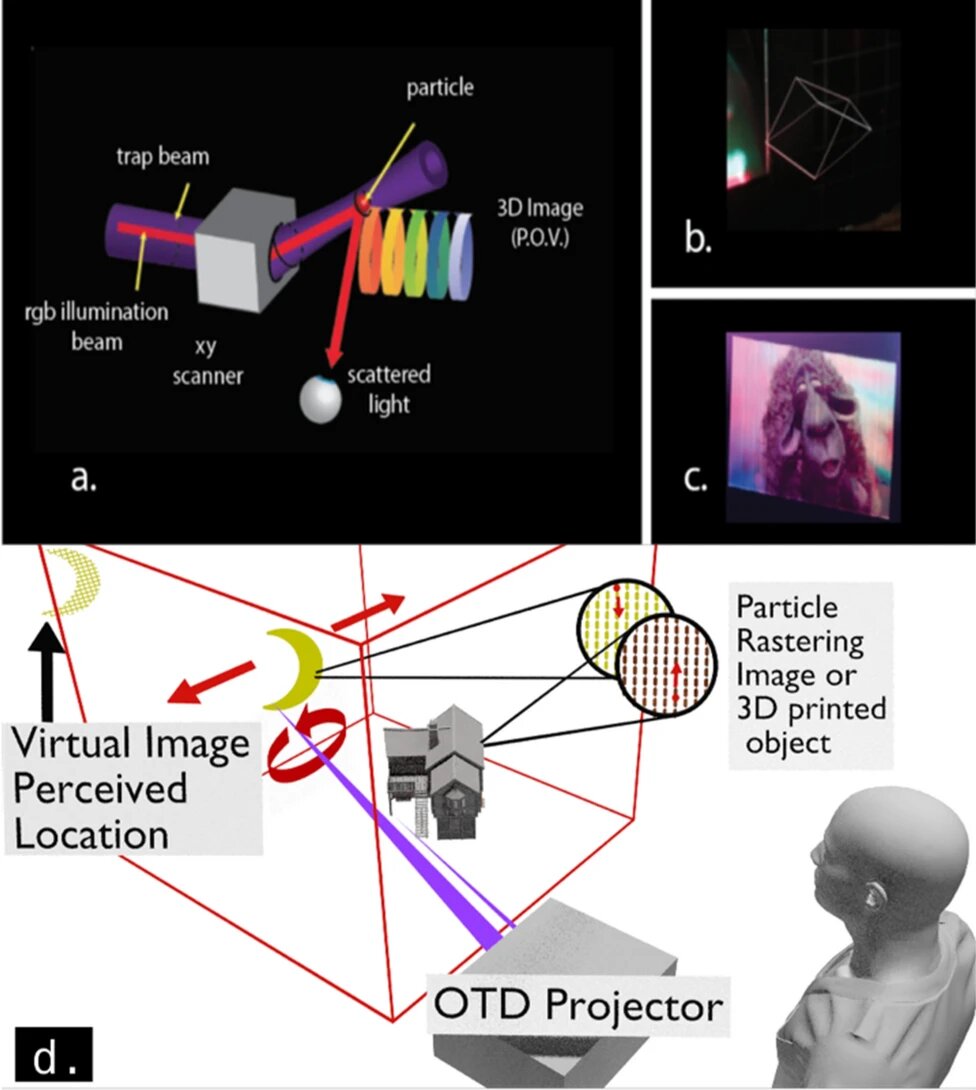
Изображение №1
В данном труде использовалась фотофоретическая визуализация на основе оптической ловушки (OTD от optical trap display), способная создавать в воздухе как плоские, так и трехмерные объекты (1b и 1c).
С помощью OTD можно создать изображение на краю объема рабочего пространства и изменить его видимый параллакс так, чтобы наблюдателю казалось, что изображение находится за объемом рабочего пространства (1d). Этот эффект называют «перспективная проекция» и достигается в OTD путем изменения масштаба, формы и параллакса объекта на плоскости фонового изображения по мере движения наблюдателя. При этом сама плоскость также может поворачиваться лицом к наблюдателю, если она конечна (т.е. не сферическая).
Авторы предыдущих исследований указывают на то, что существует ограничение — все точки изображения должны лежать вдоль линии, идущей от наблюдателя через объем дисплея. Точки, которые пользователь воспринимает на задней панели, больше не являются объемными, потому что они больше не совпадают с физическими рассеяниями, поэтому они теряют атрибут идеальной аккомодации*, но получают возможность резко увеличивать воспринимаемый размер изображения.Аккомодация* — физиологическая настройка глаза, позволяющая удерживать объект в фокусе при изменении расстояния до глаза.Используя перспективную проекцию, OTD может одновременно генерировать как реальные объемные точки изображения для переднего плана, так и моделированные необъемные точки изображения для фона.
Теория устройства
Как мы уже поняли, визуализация на базе оптических ловушек работает, удерживая одну или несколько частиц в фотофоретической ловушке. В разных трудах роль удерживаемых частиц исполняли самые разные материалы с самой разной геометрией и габаритами. В данном труде были использованы частицы целлюлозы размером 10 мкм. Когда ловушка перемещалась, частицы перемещались вместе с ней, проходя через все точки изображения. Когда частица достигала определенной точки изображения, она освещалась комбинацией красного, зеленого и синего света.
Прохождение частицы через точку происходило несколько раз в секунду, создавая видимое для человека изображение (1a). Зрительная система человека может обрабатывать от 10 до 12 кадров в секунду и воспринимать их индивидуально, в то время как более высокие скорости воспринимаются как движение. Посему 10 кадров в секунду можно считать нижней границей убедительного «фона» для данной методики визуализации.
Чем выше разрешение и частота обновления системы, тем более убедительным может быть этот эффект, поскольку наблюдатель не сможет воспринимать обновления отображаемых изображений.
Одной из наиболее общих форм перспективы является трассировка лучей, при которой наблюдатель (человек или камера) рассматриваются как одна точка E = (x0, y0, z0) плюс отображаемая точка изображения X = (x, y, z) и плоскость, на которой отображается P. Нахождение пересечения прямой EX с плоскостью P дает координату точки X в пикселях. Перспективная проекция может быть определена следующим матричным соотношением для плоскости P, перпендикулярной линии EO, где O — начало координат:
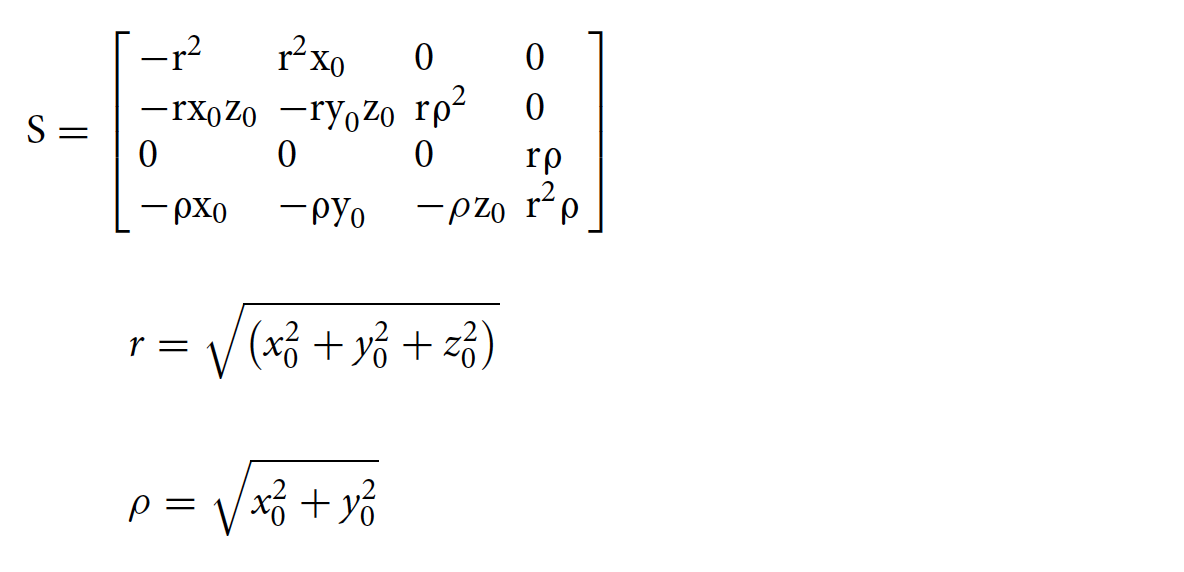
Матрица перспективной проекции предназначена для проецирования сцены из пространства на плоскость. Это позволяет отображать трехмерные точки с использованием двухмерной поверхности.
Практическое испытание устройства
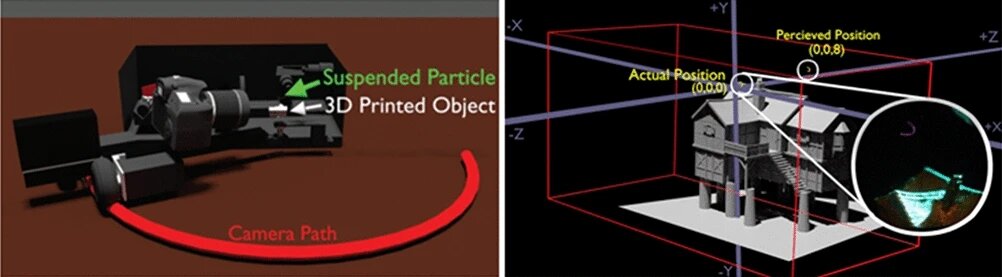
Чтобы продемонстрировать смоделированные виртуальные изображения с использованием модифицированного параллакса (перспективной проекции), было создано плоское (2D) OTD-изображение луны на задней стороне рабочего пространства. Эта плоскость, в свою очередь, находилась на передней стороне трехмерной миниатюры дома (2b).
Изображение №2
Камера (наблюдатель) была размещена на вращающемся штативе (2a). Частота смены кадров визуализированной луны сохранялась на уровне 12 кадров в секунду. Количество вокселов (объемных пикселей) в секунду, визуализируемых в ходе опытов, составило примерно 10000 в секунду. Частота обновления векторных изображений была 28 Гц, однако повышенная скорость приводит к снижению качества. Потому было решено снизить частоту до 12 Гц, что снижает эффект мерцания.
Функция воспроизведения изображения OTD менялась перспективной проекцией синхронно с движением кронштейна камеры. Скорость движения камеры составляла примерно 0.0194 м/с. Камера была сфокусирована на дымоходе дома (примерно z = 2 мм). Радиус поворота составлял 100 мм до передней грани объектива камеры. Размеры дома составляли 7.7×10.6×7.4 мм. Первоначальный диаметр луны составлял 0.5 мм, а скорость ее движения 12 кадров в секунду.Результаты исследования

Изображение №3
На 3a-3c луна «нарисована» в плоскости перед домом (z = 0 мм), при этом она не меняется, обеспечивая контрольное изображение. На 3d-3f луна все еще нарисована при z = 0, но при вращении камеры луна смещается в сторону для получения параллакса, соответствующего объекту, воспринимаемому при z = 8 мм. На 3g-3i видео с камеры наложено на симуляцию Blender (оба с включенной перспективной проекцией). При этом наблюдается незначительное смещение, вызванное несовершенством устройства, но относительный параллакс согласуется с результатами моделирования с высокой точностью (средняя ошибка составила всего 5.88%).
Анализ результатов экспериментов показал, что измененный параллакс действительно создает изображения, воспринимаемые за рабочим пространством. Модифицированный параллакс после учета смещения показал хорошее согласование с результатами моделирования, что указывает на потенциальную эффективность увеличения отображаемого пространства объемного дисплея за пределы физических границ дисплея.Несмотря на вышеописанные результаты, данная методика обладает некоторыми ограничениями: отсутствие диспаратности*, необходимость отслеживать положение глаз наблюдателя и несоответствие аккомодации/вергенции* и других визуальных сигналов.
Вергенция* — одновременное движение обоих глаз в противоположных направлениях для получения или сохранения целостного бинокулярного зрения.
Диспаратность* — различие взаимного положения точек, отображаемых на сетчатках левого и правого глаза.Эксперименты проводились с использованием камеры, т.е. монокуляра. Чтобы методика визуализации голограммы была эффективна для людей, необходимо реализовать точный бинокулярный параллакс. А для этого OTD должен обладать управляемым анизотропным рассеянием.
Второе ограничение, связанное с отслеживанием наблюдателя, является достаточно серьезной проблемой, так как обычные OTD-изображения не требуют знания положения пользователя и по-прежнему обеспечивают угол обзора почти 4π стерадиан*.
Однако, если достичь направленного рассеяния, то отслеживание наблюдателя может быть исключено как минимум в двух измерениях (горизонтальном и вертикальном). Третье же измерение (расстояние от наблюдателя до изображения) по-прежнему будет необходимо для идеальной реконструкции перспективы, поскольку перспективная проекция основана на трехмерной точке наблюдения.
Стерадиан* — единица измерения телесных углов, т.е. части пространства, которая является объединением всех лучей, выходящих из данной точки (вершины угла) и пересекающих некоторую поверхность. Полный телесный угол (полная сфера) равна 4π стерадиан.
Последним ограничением является несоответствие между аккомодационной меткой, которая заставляет пользователя фокусироваться на плоскости проекции, и меткой параллакса, которая заставляет зрителя фокусироваться на воспринимаемой точке. Подобное несоответствие стереопсиса* и аккомодации может вызывать неблагоприятные побочные эффекты для наблюдателя.
Стереопсис* — бинокулярное восприятие формы, размера и расстояния до объекта; субъективное ощущение глубины пространства.Чтобы смягчить негативные эффекты, необходимо разместить плоскость перспективной проекции на таком расстоянии, где параллакс более важен, чем аккомодация. Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых.
Эпилог
В данном труде ученые впервые продемонстрировали практическое применение OTD для создания эффекта, аналогичного виртуальным изображениям на дисплеях с оптической ловушкой.
Все это стало возможным благодаря работе ученых, которую они проделали еще в 2018 году. Тогда они смогли создать методику визуализации объектов в свободном пространстве. Фундаментом этой методики стали оптические ловушки, которые улавливают частицы в воздухе с помощью лазера. При передвижении частица следует за ловушкой, а за ней остается освещенный лазером путь, парящий в воздухе. Авторы методики назвали это »3D-принтер для света».
По словам авторов исследования, большинство 3D-дисплеев требуют, чтобы зритель смотрел на экран, но их разработка позволяет создавать физически присутствующие изображения, плавающие в свободном пространстве. Другими словами, перед нами реальный объект, а не какая-то иллюзия.
Видео, в котором авторы исследования рассказывают о своем творении.В будущем авторы труда намерены заняться совершенствованием своей разработки, в том числе и увеличением рабочего пространства устройства. По их словам, если правильно подобрать параллакс движения, то можно визуально увеличить размеры рабочего пространства без их фактического физического увеличения. Этот трюк позволит создать иллюзию дисплея вплоть до бесконечного размера, говорят ученые.
Голограммы, возможно, всем изрядно поднадоели, учитывая их частоту появления в кино, литературе и видеоиграх. Однако в реальном мире они все еще крайне редки, а их возможности весьма ограничены. Посему, пока мы с восхищением (или неприязнью) любуемся голограммами в кино, ученые продолжают трудиться в поте лица, чтобы эта технология перестала быть научной фантастикой, а стала для нас столь же реальной и обыденной, как и для героев кинематографа.
Благодарю за внимание, оставайтесь любопытствующими и хорошей всем рабочей недели, ребята. :)
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5–2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5–2697v3 2.6GHz 14C 64GB DDR4 4×960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5–2430 2.2Ghz 6C 128GB DDR3 2×960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5–2650 v4 стоимостью 9000 евро за копейки?
