Передатчик для FMCW георадара
Всем привет! Хочу поделиться своей историей разработки передатчика для ЛЧМ радара непрерывного излучения с полосой сигнала 1000МГц и величиной нелинейности изменения частоты 10–4%. Такой передатчик в дальнейшем будет применен в FMCW георадаре (Frequency-Modulated Continuous Wave — радиолокатор непрерывного излучения с частотной модуляцией).
Во введении приведена краткая информация об FMCW георадарах и сформулированы (обоснованы) требования к передатчику, в последующих разделах описаны этапы разработки, моделирования и экспериментальной проверки передатчика. Сам георадар также разработан и проходит опытную эксплуатацию. При наличии живого интереса к статье будут выложены аналогичные статьи по разработке антенн и георадара в целом.
Введение
Радары подповерхностного зондирования (георадары), представленные на рынке, в большинстве своем являются импульсными радарами. Однако в последнее время встречается ряд сообщений [1, 2, 3] о разработках георадаров, использующих излучение непрерывных сигналов. При этом как теоретически, так и практически показаны преимущества радаров с непрерывным излучением [1, 4]:
динамический диапазон георадара с непрерывным излучением более чем на 20 дБ превосходит динамический диапазон импульсных аналогов (при прочих равных характеристиках). На практике это может означать увеличение глубины обнаружения в 3 раза для точечных целей и в 4–5 раз для линейных протяженных целей;
в георадарах с непрерывным излучением возможно применение различных типов антенн (не только диполей или галстук-бабочка), в том числе экранированных, с высоким коэффициентом усиления, с круговой поляризацией (например, спираль Архимеда). Применение экранированной антенны типа спираль Архимеда позволяет сконцентрировать излучение строго вниз (по направлению к земле), отсутствие боковых и задних лепестков снижает восприимчивость георадара к наличию деревьев, металлических ограждений и прочих «помеховых» объектов. Здесь стоит отметить, что совместно с некоторыми антеннами необходимо применять деконволюцию для повышения разрешения по глубине (из-за звона антенны), жертвуя отношением сигнал-шум.
В импульсных георадарах пользователь подвергается воздействию коротких импульсов мощностью несколько киловатт (и даже мегаватт), особенно при работе с неэкранированной антенной (например, георадар Лоза или его аналоги). Влияние таких импульсов на человека слабо изучено. В любом случае, здоровье исследователя подвергается серьезному риску. Средняя излучаемая мощность FMCW георадара составляет несколько милливатт, и при направленной экранированной антенне оказывает куда более слабое влияние на пользователя.
В георадарах с непрерывным излучением целесообразно применять линейную частотную модуляцию (ЛЧМ) как наиболее простую в реализации и отвечающую современным требованиям к радарам по помехозащищенности.
FMCW георадар по функциональной схеме не отличается от получивших распространение в последнее время FMCW радаров (рис. 1). Передатчик формирует сигнал с непрерывным линейным изменением частоты во времени, который после усиления поступает в передающую антенну. Отраженный от цели сигнал с приемной антенны поступает в приемник, смешивается в смесителе с сигналом на передачу. На выходе смесителя выделяется сигнал, соответствующий разности частот переданного и принятого сигналов (разность частот еще называют частотой биений). После оцифровки такого сигнала оценивают его спектр, как правило с применением быстрого преобразования Фурье. Спектр является отображением окружающей обстановки.
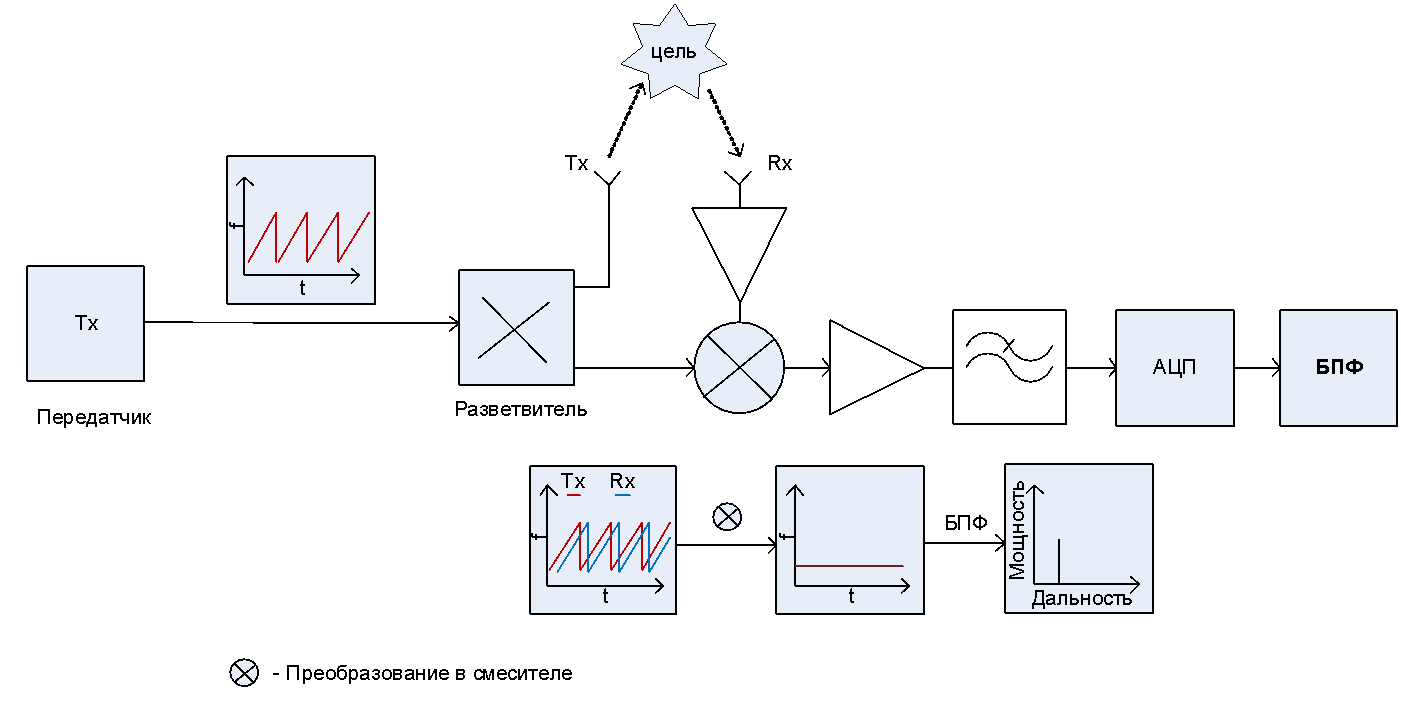 Рис. 1 — Функциональная диаграмма ЛЧМ FMCW радара
Рис. 1 — Функциональная диаграмма ЛЧМ FMCW радараПри всех вышеописанных преимуществах FMCW георадары недоступны для приобретения (по крайней мере, недоступны автору). Поэтому конечная цель работы — разработка FMCW георадара, доступного по цене для массового пользователя.
Далее приведу ряд основных требований, предъявляемых к FMCW георадару.
Частотный диапазон георадара выбирается из компромисса между глубиной зондирования и требованием к мобильности, связанным с размерами антенн, а также разрешающей способностью по глубине. Чем ниже частота, тем бОльшая глубина зондирования обеспечивается, но тем больший размер антенн требуется для эффективного использования энергии передатчика. Например, FMCW георадар RIMFAX в составе марсохода Perseverance работает в диапазоне частот (150–1200)МГц и обеспечивает глубину сканирования до 10 м [3]. Георадар Orfeus [2] имеет диапазон частот (100–1000)МГц с приемлемыми (для удобства пользования и мобильности) размерами антенны 0,52×1,04 м2.
И RIMFAX, и ORFEUS имеют полосу сигнала около 1000 МГц. В этом случае обеспечивается разрешение по глубине 5 см (для характерных грунтов с диэлектрической проницаемостью 9).
Поэтому, основываясь на опыте аналогичных разработок, примем в качестве базового частотного диапазона (100–1100)МГц.
Наиболее важной величиной в FMCW георадаре является нелинейность изменения частоты во времени, обычно выражающейся в процентах. На рисунке 2 приведены графики спектров сигналов, содержащих частоты биений с выхода смесителя для нелинейности 0% и 0,5%. Наличие нелинейности по частоте приводит к размытию спектра и ухудшает разрешающую способность георадара. Считается, что для нормального функционирования георадара нелинейность изменения частоты не должна превышать 0,1% [1].
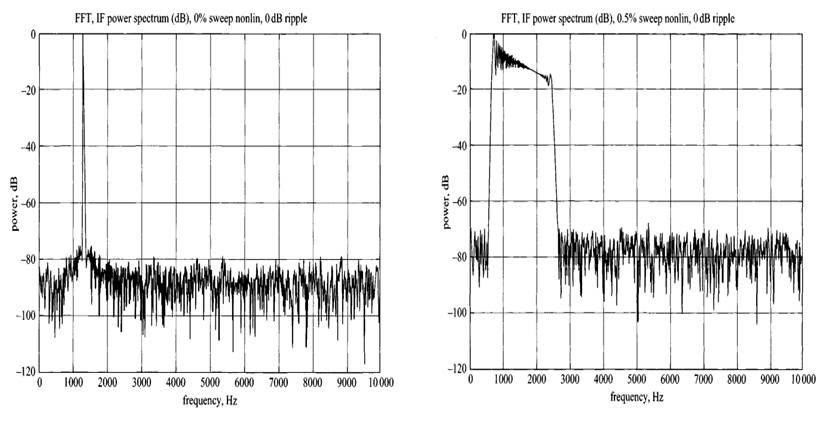 Рис. 2 — Частоты биений при нелинейности частоты передатчика 0% и 0,5%
Рис. 2 — Частоты биений при нелинейности частоты передатчика 0% и 0,5% Исходя из изложенных требований к георадару, можно сформулировать исходные данные для проектирования передатчика:
закон изменения частоты — непрерывный пилообразный;
диапазон частот — (100–1100)МГц
нелинейность изменения частоты — не более 0,1%;
передатчик должен обеспечивать динамический диапазон георадара не менее 100 дБ (без учета антенн);
выходная мощность — 10 мВт;
неравномерность амплитуды сигнала от частоты — минимальная;
рабочий диапазон температур — минус 400с — плюс 500с;
защита радиоэлектронных компонентов от пыли, влаги, инея, росы, грибков, плесени и тд;
стоимость — минимальная.
Проектирование и моделирование передатчика
Передатчик (рисунок 3) решено выполнить на основе схемы фазовой автоподстройки частоты (ФАПЧ) и преобразователя частоты. ФАПЧ состоит из фазового детектора, узла накачки заряда, петлевого фильтра, генератора, управляемого напряжением (ГУН), управляемого делителя частоты. С помощью ФАПЧ формируется ЛЧМ сигнал с частотами от Fн до Fв такими, что Fв>Fн>1100МГц, (Fв-Fн)=1000МГц. Период свипирования устанавливается схемой управления и изменением номиналов емкостей и сопротивлений петлевого фильтра. Для определенности, дальнейшее изложение статьи приведено для периода свипирования 6,67 мс (150 Гц), хотя может быть установлен любым в диапазоне (10–4–10–1)с.
Преобразователь частоты, состоящий из фильтра низкой частоты, смесителя, генератора сигнала постоянной частоты, усилителей, предназначен для переноса частоты в область частот функционирования георадара. Гетеродин представляет собой управляемый синтезатор частоты, и может иметь частоты из ряда, обеспечивая (по выбору пользователя) диапазоны частот георадара:
(1–1001)МГц;
(10–1010)МГц;
(100–1100)МГц — базовый диапазон;
(1000–2000)МГц;
(2000–3000)МГц.
На рисунке 4 представлен график изменения частоты во времени на выходе передатчика, полученного путем схемного моделирования работы передающего устройства. При этом согласно данным моделирования, пиковое отклонение частоты от линейной зависимости составляет 121 Гц (среднеквадратичное — 51 Гц), что составляет 0,0001% и на несколько порядков ниже заданного предела (0,1%).
 Рис. 3 — Функциональная схема разработанного передатчика
Рис. 3 — Функциональная схема разработанного передатчика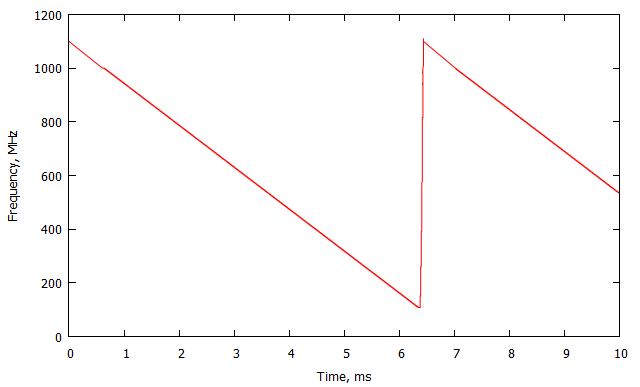 Рис. 4 — Изменение частоты выходного сигнала передатчика во времени
Рис. 4 — Изменение частоты выходного сигнала передатчика во времени 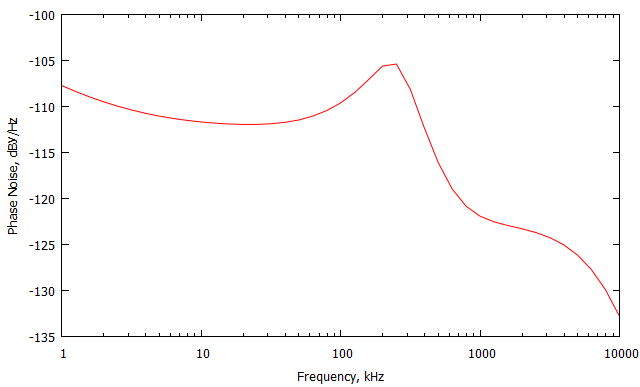 Рис. 5 — Фазовый шум передающего устройства на частоте несущей 1100 МГц при отстройке (1–10000)кГц
Рис. 5 — Фазовый шум передающего устройства на частоте несущей 1100 МГц при отстройке (1–10000)кГц На рисунке 5 представлен график фазового шума передающего устройства, полученный моделированием для частоты несущей 1100 МГц, при отстройке от несущей (1–10000)кГц.
Экспериментальная проверка работы передающего устройства
Для оценки разработанного передатчика собрана экспериментальная установка, имитирующая георадар, в котором отсутствуют антенны, а выход передатчика подключен к разветвителю, который через аттенюатор соединен со смесителем кабелем RG405 длиной 1 м (рисунок 6).
 Рис. 6 — Схема эксперимента для оценивания качества сигнала, формируемого передатчиком
Рис. 6 — Схема эксперимента для оценивания качества сигнала, формируемого передатчикомВ качестве фильтра нижних частот и аналого-цифрового преобразователя (АЦП) применена звуковая карта с отношением сигнал-шум 100 дБ и частотой дискретизации 48 кГц. На один из входов звуковой карты подавался сигнал синхронизации с передатчика, на другой — сигнал с выхода смесителя. Обработка сигнала осуществлялась в пакете GnuRadio.
После получения сигнала синхронизации формируется пакет длительностью 320 отсчетов (48кГц*6,67 мс), проводится оконное взвешивание функцией Хэннинга, пакет дополняется таким же количеством нулей для интерполяции, далее проводится преобразование Фурье с отображением результата.
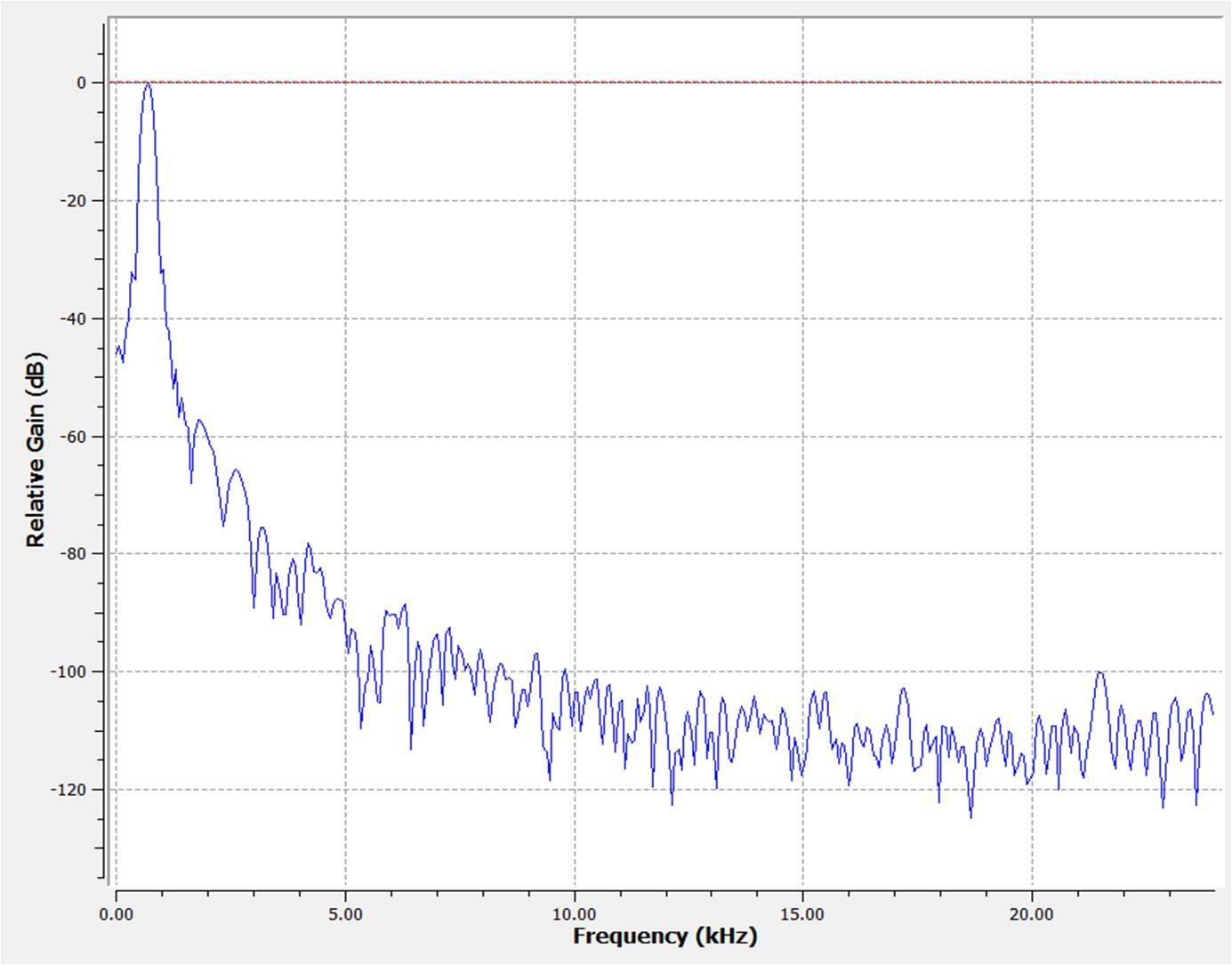 Рис. 7 — Спектр сигнала, соответствующий задержке в кабеле длиной 1 м
Рис. 7 — Спектр сигнала, соответствующий задержке в кабеле длиной 1 м На рисунке 7 приведен измеренный спектр сигнала, содержащий частоты биения. Положение максимума точно соответствует задержке, соответствующей длине кабеля с учетом коэффициента укорочения.
Из рисунка 7 следует, что динамический диапазон, обеспечиваемый передатчиком, составляет 100 дБ. Следует отметить, что динамический диапазон георадара может отличаться от указанных 100 дБ. Так, для увеличения динамического диапазона в георадаре могут применяться усреднения, автоматическая регулировка усиления (в случае с FMCW радаром — фильтр с наклонной АЧХ), когерентное накопление и др. В то же время из-за просачивания мощности из передающей антенны в приемную, снижается чувствительность приемника, что влечет к уменьшению динамического диапазона.
Основываясь на результатах моделирования и результатах экспериментальной проверки, можно сделать вывод о выполнении основных заданных требований к передатчику. Лабораторная проверка георадара с разработанным передатчиком также показала выполнение основных заданных требований.
Разработанный передатчик имеет размеры 100×100х25 мм3, масса — 0,2 кг, стоимость электронных компонентов не превышает 30 тыс. руб., включая печатные платы. Достигнутые характеристики, вероятно, могут обеспечить конкурентное преимущество FMCW георадара, а приборы станут более доступными.
Заключение
Описанная работа проводилась автором в одиночку на протяжении 1,5 лет в качестве радиолюбительского хобби. Часть сведений пока не раскрываются в надежде на коммерческую реализацию разработанного георадара. Буду признателен за конструктивную критику и ценные замечания. Для Хабра пишу впервые, прошу понять и простить за недостатки в оформлении.
Список литературы
D.J. Daniels, Ground penetrating radar, 2nd edition. The Institution of Electrical Engineers. London. 2004. 752 p.
F. Parrini et. al., «ORFEUS GPR: a very large bandwidth and high dynamic range CWSF radar»//Proceedings of the 13 International Conference on Ground Penetrating Radar, Lecce. Italy. 2010. pp. 1–5.
Hamran et al., «RIMFAX: A GPR for the Mars 2020 rover mission» // 2015 8th International Workshop on Advanced Ground Penetrating Radar (IWAGPR). Florence. Italy. 2015. pp. 1–4.
M. Pieraccini, «Noise performance Comparison Between Continuous Wave and Stroboscopic Pulse Ground Penetrating Radar» // IEEE Geoscience and Remote Sensing Letters. vol. 15, no. 2. Feb. 2018. pp. 222–226.
