Обеспечение связью подвижных объектов и инструменты повышения ее надёжности
Очень бы хотелось в данной статье дать много полезной справочной информации по сему вопросу, включая обзоры научно-практических исследований.
Итак, предположим, что отправляем в путь военную автоколонну. Согласно регламенту, одним из неотъемлемых атрибутов данного комплекса мероприятий является необходимость оснащения всех автомобилей колонны средствами высокочастотной связи в рамках одной локальной сети.
«ОПК», входящая в «Ростех», представила первую цифровую радиостанцию МО1 6 го поколения ещё в 2016 году (Software Defined Radio — SDR), обладающую свойствами когнитивности. Для лучшего понимания перечислим основные.
Свойство когнитивности (или способность к познанию и самообучению) подразумевает способность радиосистемы решать следующие задачи:1. оценка, так называемой, шумовой температуры радиосреды, обнаружение неиспользуемых в данный момент времени полос радиочастот;
2. анализ параметров радиоканала, оценка канальной информации, предсказание состояния радиоканала;
3. контроль излучаемой мощности и динамическое управление спектром.
Для лучшего понимания: вес станции примерно 3,8 кг, кроме того передача данных между двумя станциями не требует ретрансляторов и исключает наличие «мертвых зон» линиях связи длиной до 600 км. При этом она способна вести стабильную передачу данных на расстоянии 6300 км.
Серийное производство радиостанции МО1 началась еще в 2017 году и сегодня такие (эти и подобные) станции составляют около 70% оснащения силовых структур.
Также 2017 год ознаменован принятием на вооружение портативной радиостанции «Р-187П1 АЗАРТ», также являющейся станцией 6 го поколения и позволяющей использование различных протоколов и программного обеспечения, поддающегося обучению и расширяющему функционал.
Из ярких особенностей радиостанции можно отметить смену частот каждые 45 микросекунд.
Немного о «начинке»
Протоколы передачи данных в радиостанциях когнитивного типа, как и упоминалось выше в свойствах, удивляют своей способностью адаптироваться к обстоятельствам в режиме реального времени.
OS-MAC (Opportunistic Spectrum MAC — протокол с приспособлением) к РЧС, который разделяет вторичных пользователей SU на несколько групп. Радиоканал или радиоканалы, используемые группой SU, могут динамически меняться в зависимости от состояния РЧС и состояния доступности каналов всей когнитивной системы. Протокол OS-MAC предлагает некооперативный режим взаимодействия между SU и PU, т.е., по сути, почти полное отсутствие такого взаимодействия. При такой модели сначала производится зондирование РЧС, с целью определения возможного поведения и режима работы PU. Далее выделяется канальный ресурс для SU, который в определенной мере учитывает требования этой группы пользователей. Как только каналы выделены, SU начинает их использовать. Главным недостатком данного подхода является то, что только первоначально выделенный канальный ресурс, соответствует требованиям SU. Далее выделение канального ресурса, соответствует типовому шаблону, заданному при начальном распределении РЧС. Такие шаблоны формируются из геолокационной базы данных для определения местоположения PU и SU, шаблоны не перестраиваются в реальном времени.
HC-MAC (Hardware-Constrained MAC — аппаратно-ограниченный протокол MAC-уровня) , используют метод кластеризации (k-means), обеспечивающий наилучшую аппроксимацию данных получаемых извне, для отслеживания неиспользуемых каналов РЧС с высокой точностью. После того, как обнаружены свободные каналы, SU может начать их использовать. Протокол HC- MAC учитывает аппаратные ограничения устройств, включая ограничения по техническим возможностям зондирования РЧС и ограничения по скорости передачи в рабочем канале. Однако, если группа или единичное SU обнаружат неиспользуемые каналы РЧС, в то время, когда их соседние по местоположению группы SU, не получив запрос на отправку RTS (Request to Send — запрос на отправку) / разрешение отправки CTS (Clear to Send — разрешение отправки) данных в этом же канале, то первая группа SU не может точно определить, какие из каналов будут гарантированно доступны в ближайшее время. В результате могут образоваться коллизии и помехи в работе с соседними группами SU или единичным SU.
В кросс-уровневом MAC-протоколе доступа CO-MAC (Сross-Layer Based Opportunistic MAC — кросс-уровневый MAC-протокол) предлагается два метода зондирования РЧС: метод случайного зондирования и зондирование на основе опроса соседних узлов. Протокол кросс-уровневого взаимодействия использует технологию условного «склеивания» и «разделения» путем мультиплексирования для передачи данных по нескольким каналам. В данной работе предлагается поиск оптимального сочетания пропускной способности и задержки в канале, что позволяет контролировать предоставляемое качество сервиса QoS (Quality of service — качество сервиса) на базе когнитивного радио. Тем не менее, в методе CO-MAC основное внимание уделено обмену между парой SU. Также недостатком является отсутствие обоснования похода по кри- терию «стоимость — эффективность».
В протоколе многократного доступа с зондированием несущей CSMA-MAC (Carrier Sense Multiple Access MAC — протокол многократного доступа с зондированием несущей), каждый узел SU поддерживает список предпочтительных каналов для каждого из соседних узлов SU на основе истории взаимодействия с этими узлами. Это позволяет выбирать собственный рабочий канал, не конфликтуя, в смысле предыстории, с соседними узлами. Однако хранить весь список доступных каналов на устройствах SU малоэффективно, поэтому предлагается использовать специальный алгоритм для создания списков соседей и обмена актуальной информацией между ними. Недостаток заключается в том, что данный протокол требует существенного времени на обмен и подходит для небольшой группы РЭС SU.
В 2019 году ведущим инженером анализа и обработки качественных показателей мобильной сети ООО «Хуавей Технолоджес Сервисез» Зуевым А.В. был предложен новый вид протокола передачи данных, основанный на аукционной модели с помощью имитационно-статистического моделирования.
Вернемся к колонне
В случае оснащения каждого объекта радиостанцией 6 го поколения, образуется локальная радиосеть, которая призвана обеспечивать высококачественную связь даже в условиях сильно пересечённой местности без использования систем ретрансляции.
Однако, даже при таком оснащений, все равно есть ряд ключевых характеристик, которые учитываются при разработке плана комплекса такого мероприятия, как прохождение автоколонны (военной либо гражданской, с сопровождением либо без ):
1. Наличие проблесковых маячков на сопроводительных автомобилях, наличие графического нанесения;
2. Габаритные огни на каждом объекте;
3. Длина каждой единицы техники;
4. Возможно нанесение порядкового номера на крышу каждого авто.
В случае необходимой конфиденциальной связи между автомобилями в колоннах и схемы повышения её надёжности проведены исследования применения грузовых коптеров и разных видов ретрансляции, а также в одной из схем использована современная система позиционирования на базе видеокамеры. Приведен вариант системы обработки видеоинформации.
На основании проведённых исследований для реализации высокоскоростной конфиденциальной связи в колоннах автомашин применима ретрансляция в «пассивных» и «активных» системах, с использованием квадрокоптеров, с совершенной стабилизацией.
При «активном» варианте ретрансляции предусмотрено размещение 1 передатчика и 1 приемника системы АОЛС и суммарный вес аппаратуры составляет около 20 кг. Соотвественно использование при таком варианте легкого дрона невозможно.
В «пассивном» варианте с зеркальными отражателями вес полезной нагрузки существенно снижается и могут использоваться коптеры «легкого» типа. Что также снижает и затраты на обеспечение комплекса мероприятий.К вопросу об эффективности: при использовании зеркал с металлическим напылением, коэффициент отражения может быть выше 97%, а при использовании многослойных диэлектрических зеркал, коэффициент отражения может превышать 99%.
Одним из Необходимых условий для обеспечения совершенной связи с использованием коптера является использование дрона с 6тиосевой системой гироскопа.
6-осевая система имеет датчики тангажа, крена и рыскания, а также акселерометр, позволяющий вычислить необходимое ускорение в различных направлениях. Другими словами, дрон сможет компенсировать порывы сильного ветра и практически мгновенно принимать устойчивое положение. Кроме того, 6-осевой гироскоп самостоятельно выявляет некорректное положение коптера в воздухе и сигнализирует, когда коптер падает. Благодаря этому пилот может выровнять стики, увеличить скорость движения и остановить падение. Подобная опция спасла множество дорогостоящих устройств от повреждений.
Итак, попадая в условия сильно пересечённой местности условие «прямой видимости» между начальными и конечными объектами колонны, как правило, не выполняется. Для реализации высокоскоростной связи, на помощь приходит ретрансляция с использованием квадрокоптера. Проведенные экспериментальные исследования, показали, что наименьшие флуктуации угла наклона лазерного излучения, с отражателем зеркального типа, могут быть реализованы на «легком» квадрокоптере DJI Mavic Pro Platinum. Нужно отметить, что на трассах протяженностью ~ 60 — 80 м, диаметр лазерного излучения в системах АОЛС, в плоскости приемника, как правило, не превышает 30 — 40 см. Несмотря на относительно малую расходимость лазерного излучения, высокоскоростная связь в колонне, может быть реализована за счет установки приёмников излучения, например, на крышу кабины каждого автомобиля. При этом, расстояние между автомашинами в схеме: передатчик — приемник, можно определить несколькими способами. 1) Использование видеокамеры на самом квадрокоптере. На крыше каждого авто наносят его порядковый номер в колонне. В колоннах обычных авто, как правило, жестко поддерживают дистанцию между машинами, например, 10 — 12 м, не говоря о военных колоннах. Длина каждого авто в колонне, так же известна с точностью до единиц см. Тогда расстояние между, например, авто No1 и авто No28, с использованием информации от камеры коптера, и зная его высоту над колонной, находится из простых геометрических формул.
2) Для повышения надежности связи могут быть использованы, недавно разработанные, современные системы позиционирования с использованием видеокамеры и габаритных огней автомашины.
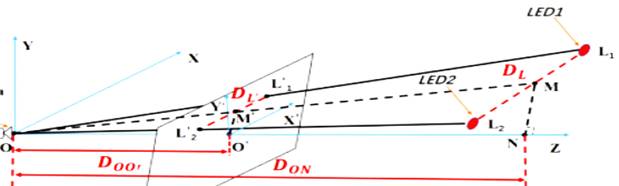
Габаритные огни автомашины, расстояние до которой измеряется, обозначены (L1, L2) — на расстоянии DOO` и (L1, L2) — на расстоянии DON, соответственно, от центра камеры на тестовой автомашине. Расстояние DON вычисляется из геометрических соотношений. При этом, разница в длинах между задними габаритными огнями автомашины — экрана — DL`, DL, на соответствующих расстояниях, определяется в пикселях видеокамеры с высокой точностью.
Вариант схемы обработки изображений видеокамеры, используемой в измерительной системе:[Видеокадр]—[Преобразование оттенков серого] — [Контрастное усиление]—-(а).-—[Бинаризация]—[Выходная длина D l]—-(b)-—[Центральные точки L1 и Извлечение L2]—[Извлечение контура]—[Обработка морфологии]
