Мультикоптеры научились подсаживаться на крыши движущихся автомобилей

Беспилотник садится на крышу легкового автомобиля на скорости 50 км/ч
Способность мультикоптеров статично зависать в воздухе делает их отличным инструментом для выполнения различных задач, в том числе для видеонаблюдения, доставки посылок или участия в поисково-спасательных операциях. В то же время, им приходится мириться с ограничением по времени автономной работы и относительно небольшим радиусом действия. Заряда аккумуляторов не хватает, чтобы добраться на место, если то расположено за много километров от базы. Инженеры из лаборатории мобильных роботехнических и автономных систем Политехнической школы Монреаля (Канада) предложили оригинальное решение проблемы: беспилотник по пути своего маршрута научили подсаживаться на крыши попутных автомобилей, движущихся со скоростью до 50 км/ч. Попутные машины буквально превращаются в авианосцы.
Если полиция имеет полное право использовать для своих нужд гражданский автотранспорт, то и полицейские беспилотники могут наделить таким правом. Можно представить, что даже для гражданских беспилотников внедрят систему «коммерческого партнёрства», так что водителям будут платить небольшое вознаграждение, если к крыше прикрепился беспилотный пассажир. По тарифу за каждый километр. Мультикоптер будет распознавать автомобили (по координатам GPS и визуально) и подсаживаться на крыши только тех, которые участвуют в партнёрской программе.
Собственно, с нынешней технологией беспилотник просто и не сможет подсаживаться на крыши произвольных автомобилей, потому что для прицеливания ему требуется наличие посадочной площадки на крыше со специальным чёрно-белым кодом AprilTag.

Крыша обычного автомобиля не очень подходит для оборудования такой площадки. Разработчики системы считают, что в качестве авианосцев подойдёт общественный транспорт (автобусы), грузовики почты и службы доставки. Эти машины активно колесят по городу, так что для беспилотника не станет проблемой «на халяву» подскочить десяток километров к месту назначения.
В теории, оборудовать такими посадочными площадками можно и крыши легковых автомобилей. Во время испытательных полётов исследователи показали, что даже относительно небольшой площадки на «легковушке» достаточно для посадки.

Беспилотник садится на крышу легкового автомобиля на скорости 40 км/ч
Преимущество такого способа передвижения ещё и в том, что беспилотник на крыше может заряжать свои аккумуляторы. Таким образом решаются сразу две существующие проблемы БПЛА — недостаточный заряд аккумулятора и малый радиус действия.
Разработанная канадскими инженерами система беспилотной посадки использует сигнал GPS с мобильного телефона для поиска транспортного средства, а при посадке не требует координации маневров между БПЛА и автомобилем. То есть от водителя вообще не требуется никакого содействия, кроме установки на крышу посадочной платформы с визуальным маркером и мобильником. Теоретически, водитель во время поездки может даже не заметить, что его автомобилем кто-то попользовался в дороге.
Ключевым элементом при посадке беспилотника на крышу автомобиля являются чёрно-белые визуальные маркеры AprilTag, которые в последнее время всё чаще применяются в робототехнике. Разработанные Ольсоном в 2011 году, такие маркеры выполняют роль одновременно и визуальной идентификации, и точного 3D-позиционирования объекта относительно камеры.

Для прицеливания беспилотника и координации с платформой по шести степеням свободы используется маркер 30×30 см. В качестве вспомогательной информации достаточно приблизительной оценки координат и скорости автомобиля, которая поступает с модулей GPS и IMU (Inertial Measurement Unit) мобильного телефона.
На квадрокоптере установлены инерциальная навигационная система (INS), карданная камера, ориентируемая по трём осям (с отдельным IMU), для трекинга цели, а также широкоугольная неподвижная камера, направленная вниз, которая отслеживает маркер AprilTag на близком расстоянии в последние секунды маневра. Разработчики отмечают, что на этапе приближения к автомобилю БПЛА может воспользоваться ещё и сенсором скорости, который ставят на многие современные квадрокоптеры. Такие сенсоры вычисляют скорость по последовательности фотокадров.

Оценка относительного местоположения, скорости и ускорения вычисляется на бортовом компьютере с помощью фильтра Калмана на частоте 100 Гц. Это эффективный рекурсивный фильтр, оценивающий вектор состояния динамической системы, используя ряд неполных и зашумленных измерений.

Эксперименты показали, что мультикоптер успешно садиться на автомобили на скорости до 50 км/ч. При увеличении скорости увеличивается риск сваливания с края платформы. Возможно, эту проблему можно решить, если увеличить скорость обработки информации с камер беспилотника.
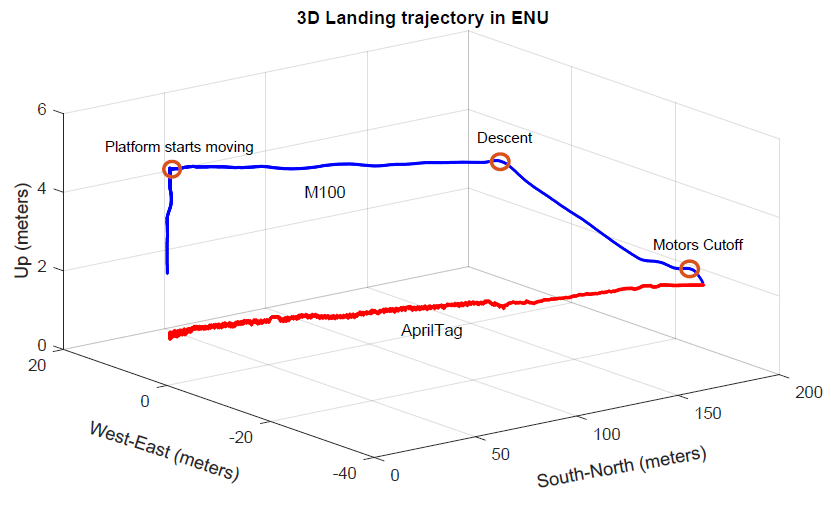
Траектория посадки на скорости 50 км/ч
Научная статья подготовлена к всемирному конгрессу IFAC 2017 и опубликована 22 ноября 2016 года на сайте arXiv.org (arXiv:1611.07329).
