Миссия «Чанъэ-4» — третий лунный день. Ровер «Юйту-2» в поисках… камней

Лунный ровер «Юйту-2» проехал за третий лунный день 43 метра, добавив их к пройденным 44 (44.185) метрам в первый лунный день и 76 метрам (75.815) во второй лунный день. Итого пройдено 163 метра за три лунных дня. Это много или мало? И почему такое небольшое расстояние проезжает лунный ровер в этой миссии?
Ранее опубликованные материалы про миссию «Чанъэ-4»:
Третий лунный день для миссии «Чанъэ-4» — это период с 27 февраля 2019 года по 13 марта 2019 года:
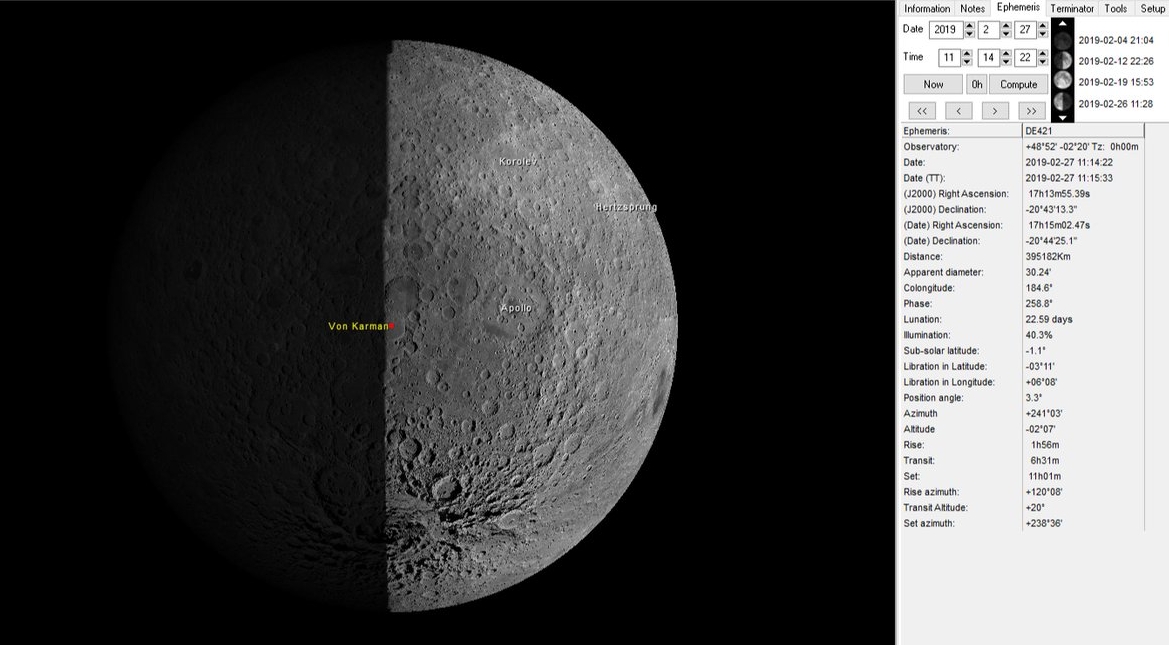
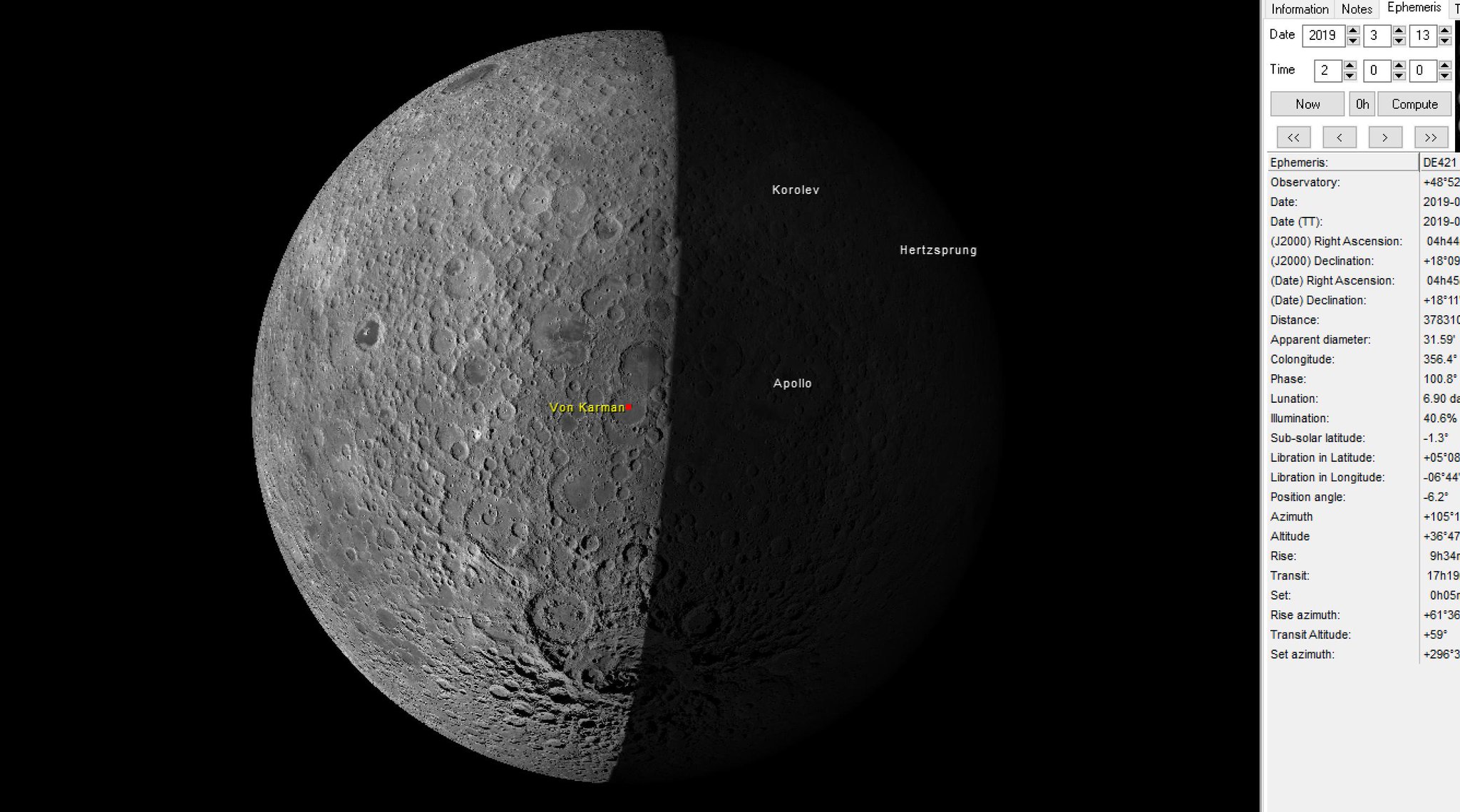
В настоящее время с 13 марта 2019 года оборудование посадочного модуля «Чанъэ-4» и ровер «Юйту-2» переведены в спящий режим до окончания третьей лунной ночи, чтобы пережить период крайне низкотемпературной среды на обратной стороне Луны.
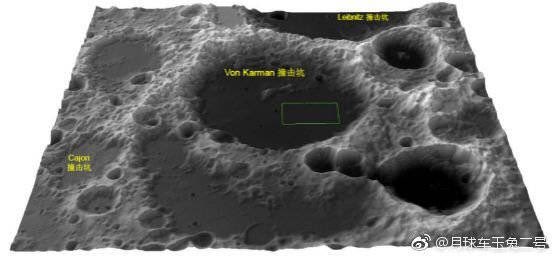
Какая там поверхность на обратной стороне Луны?
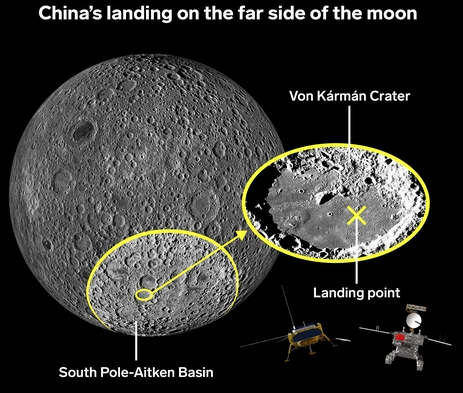
Поскольку обратная сторона Луны также имеет более сложный рельеф, чем видимая с Земли сторона, то в процессе движения по поверхности ровер «Юйту-2» столкнулся с более серьезными двигательными проблемами и помехами, по сравнению с теми, с которыми ранее сталкивался его предшественник ровер «Юйту», отправленный на Лунную поверхность в 2013 году.
К сожалению, первый ровер «Юйту» миссии «Чанъэ-3», 25 января 2014 года был технически обездвижен (поломка элементов в результате столкновения) после преодоления 114,8 метра по сложной лунной поверхности.
Лунная поверхность в зоне высадки посадочного модуля «Чанъэ-4» изобилует складками, многочисленными камушками и небольшими кратерами, после совершения каждого своего небольшого движения, ровер «Юйту-2» должен остановиться, сфотографировать поверхность вокруг и отправить эти данные обратно на Землю через спутник-ретранслятор.
Ученые, операторы в ЦУПе и инженеры на Земле затем обрабатывают эти данные и намечают дальнейший маршрут, по которому ровер «Юйту-2» будет следовать далее.
Антенны ровера «Юйту-2» необходимо настроить так, чтобы они указывали на спутник-ретранслятор, для корректной отправки и получения управляющих сигналов, в то время как солнечные панели ровера должны быть оптимально наклонены для попадания на них большого количества солнечного света, чтобы максимизировать выработку электроэнергии в момент совершения передачи данных.

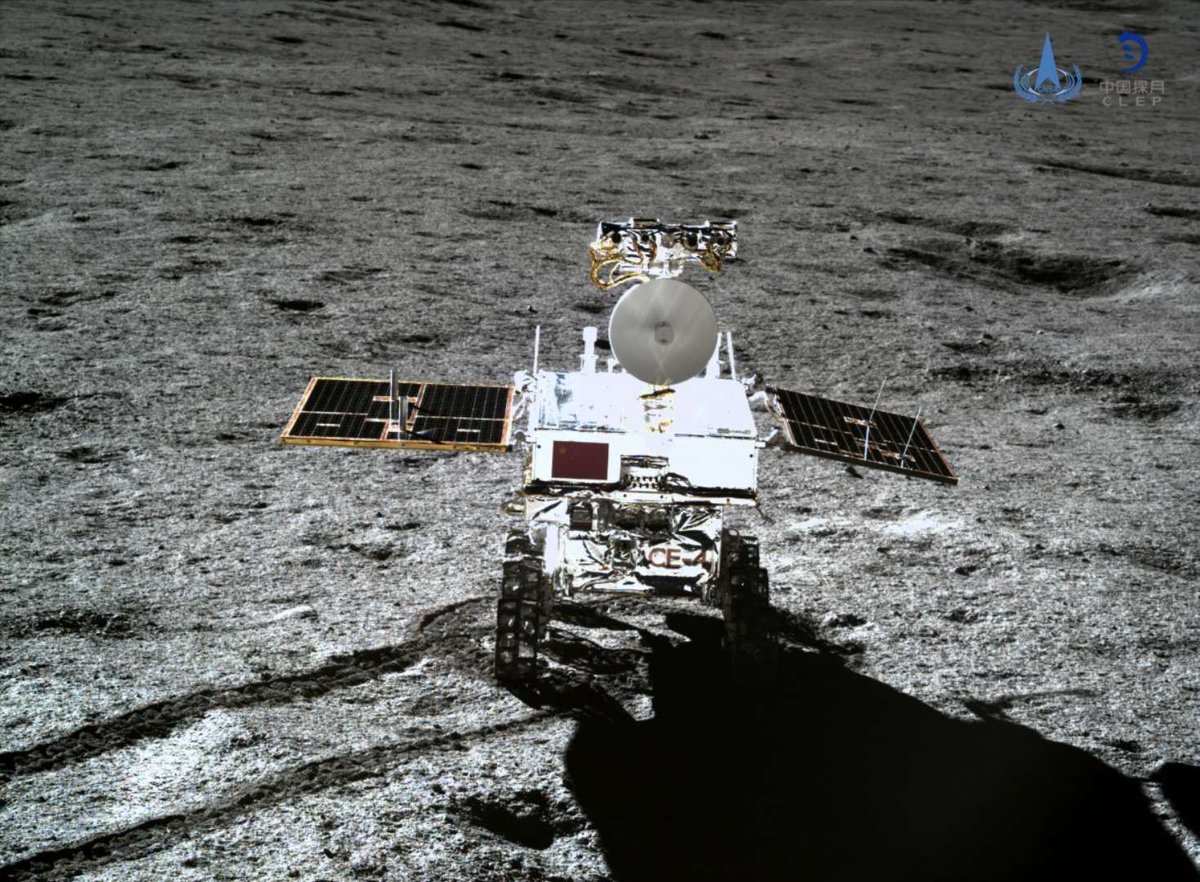
Шестиколесный ровер «Юйту-2»:
— общая масса ровера составляет около 140 кг (310 фунтов);
— грузоподъемность — около 20 кг (44 фунта);
— может перемещаться по наклонам и имеет автоматические датчики, предотвращающие столкновение с другими объектами;
— электроэнергией ровер обеспечивается с помощью двух солнечных батарей, позволяющих роверу работать в течение лунного дня;
— максимальная скорость 200 метров в час (данную скорость на Луне все равно не достигнуть — так как элементы на поверхности не дадут разогнаться и выведут из строя ровер раньше);
— максимальная площадь исследования — 3 кв. км;
— расчетное время работы — 3 месяца (2160 часов);
— максимальная расчетная дистанция — 10 км.
На данный момент прошло 70 дней (1680 часов) после высадки ровера «Юйту-2» на Лунную поверхность и 97 дней (2328 часов) после запуска с космодрома Сичан ровера «Юйту-2» в составе миссии «Чанъэ-4» на Луну.
Фактически, ровер «Юйту-2» уже выработал свой расчетный рабочий ресурс, но в случае успешного «пробуждения» после сна 27 марта 2019 года, планируется, что он будет продолжать заниматься исследованиями поверхности и на свой четвертый лунный день.
Но вот насколько хватит его возможностей в плане работоспособности — это уже сверх проектной нормы и будут начинаться проблемы или поломки в узлах и системах, так как большие перепады температуры, радиация, загрязнение и другие лунные внешние факторы будут влиять на его характеристики сильнее с каждым часом.
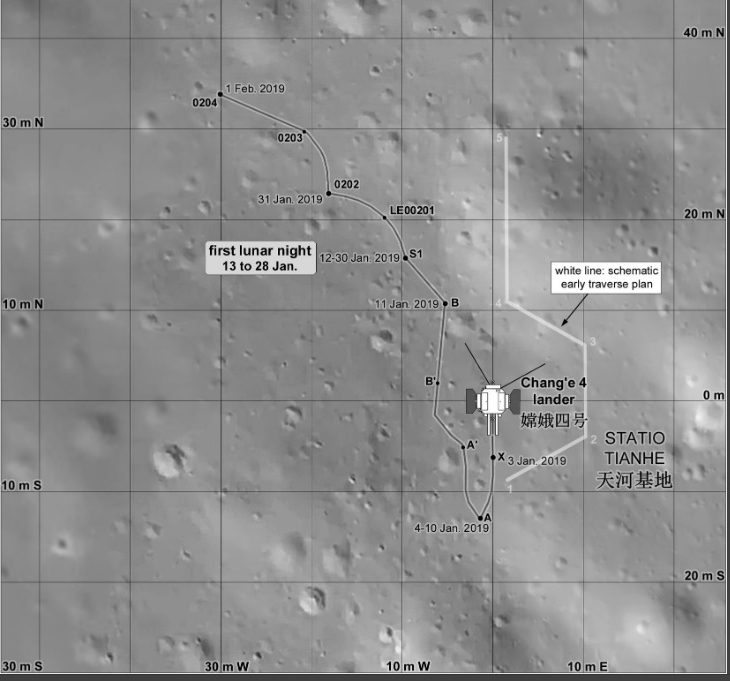
Траектория движения ровера «Юйту-2» в первый лунный день и часть второго лунного дня:
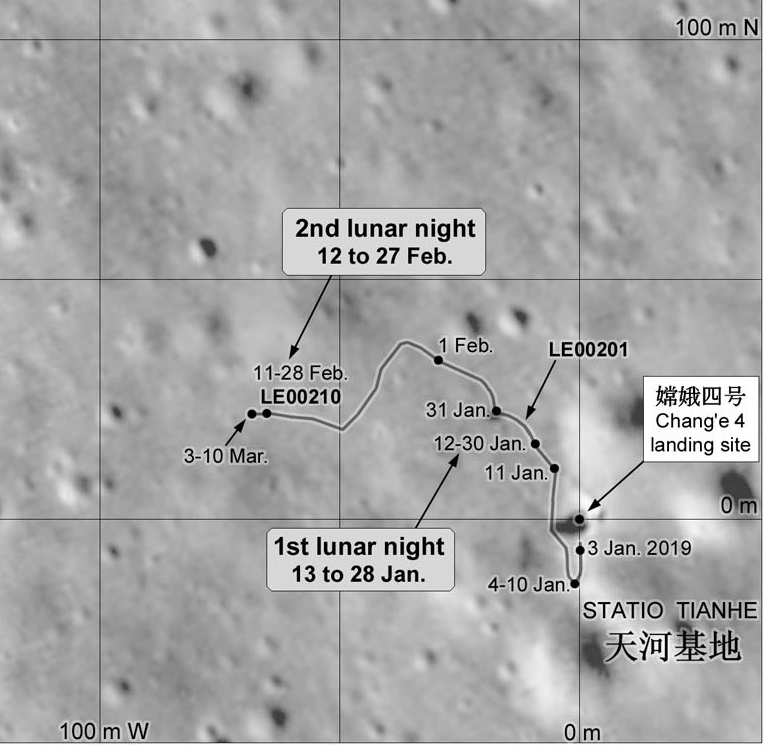
Можно сверить по фото места посадки, которое сделал зонд NASA LRO с высоты 82 километров, разрешение 0,85 метра (33 дюйма) на 1 пиксель:

На данный момент ровер «Юйту-2» находится на расстоянии более 80 метров по диагонали от посадочного модуля «Чанъэ-4» и проехал уже 163 метра после своей высадки.
Почему ровер «Юйту-2» так мало проехал?
Во-первых, это «боязнь» обездвижить ровер «Юйту-2» (и не повторить судьбу первого ровера «Юйту»), поэтому роверу «Юйту-2» необходимо передвигаться по поверхности Луны, старательно избегая препятствий. Каждое его сантиметровое движение нужно делать аккуратно и правильно. В ЦУПе миссии «Чанъэ-4» стараются избегать ситуации, при которой ровер «Юйту-2» перевернется, что означает, что он не сможет снова вернуться в рабочее положение. Солнечные панели на бортах лунного ровера «Юйту-2» очень хрупкие, они могут треснуть или покрыться пылью после падения, что приведет их в негодность.
Во-вторых, обратная сторона Луны чаще подвержена падению метеоритов, поэтому рельеф там очень сложный, на Лунной поверхности в зоне высадки очень много небольших кратеров и углублений, которые нужно объехать на максимально безопасном расстоянии, но все равно нужно двигаться дальше в поисках нужных для изучения элементов поверхности — больших камней и образований. А их поиск и исследование разных образований — это необходимые так же вынужденные и остановки для проведения исследований на одном месте с длительным временем остановки.
Таким образом, в первый и второй лунный день с помощью данных с бортовых камер ровера «Юйту-2» также дорабатывалась детальная карта зоны места посадки и возможного дальнейшего маршрута ровера, который оказался намного извилистее, чем планируемый ранее прямой путь.
В третий лунный день, ровер «Юйту-2» доехал до места с интересными для изучения образованиями на лунной поверхности — острые пики на поверхности, средние и большие отдельно стоящие камни.
Элементы ландшафта на обратной стороне лунной поверхности могут быть старше, чем подобные на видимой стороне, поэтому изучение грунта и камней на обратной стороне может пролить больше света на происхождение и эволюцию Луны.
Кто управляет ровером «Юйту-2»?
Телеметрия, данные с камер и научного оборудования, команды управления и круглосуточное слежение за параметрами ровера «Юйту-2» — это прерогатива инженеров аэрокосмического центра управления Китайской академия космических технологий.
В Китае Луна традиционно ассоциируется с женщинами, китайская программа исследования Луны тоже названа в честь богини Луны — Чанъэ, что подчеркивает вклад женщин-ученых и инженеров в развитие космических исследований.
В китайской легенде девушка по имени Чанъэ полетела на Луну и стала там богиней, но не может вернуться обратно на Землю, чтобы воссоединиться со своим мужем.
Девушкам-инженерам аэрокосмического центра управления Китайской академия космических технологий повезло больше — у многих из них есть возможность слетать «виртуально» на Луну и быть одновременно на Земле со своими близкими.
Оказывается, что женщины из инженерной команды по управлению и контролю ровера «Юйту-2» обладают более сильным чувством ответственности и усидчивостью, чем многие их коллеги мужчины, они более требовательны и наблюдательны к самым мелким деталям в процессе работы с ровером «Юйту-2». Поэтому, среди группы инженеров-операторов ровера «Юйту-2», они могут максимально проявлять научные и инженерные таланты в своей работе.
Проверка данных телеметрии с коллегой:

Рабочее место оператора ровера «Юйту-2»:

А теперь вернемся к роверу «Юйту-2».
Более трех миллиардов лет назад обратная поверхность Луны подверглась бомбардировке крупными астероидами и метеоритами, что вызвало глобальные изменение на ее поверхности, следы этого процесса и изучает ровер «Юйту-2».
Бортовые камеры ровера «Юйту-2» стационарные, для получения нужных изображений необходимо выполнять точное перемещение и регулировку горизонтального положения, а также компенсацию угла наклона самого ровера, что занимает у операторов в ЦУПе много времени. Ведь поверхность в зоне высадки ровера «Юйту-2» усеяна кратерами разных размеров, что очень затрудняет его безопасное передвижение.
Оказывается, ровер «Юйту-2» способен автоматически обходить некоторые препятствия, если перед ним будет большой камень или кратер, то он может самостоятельно остановиться и спланировать новый маршрут в обход этого места, в этом случае оператор в ЦУПе может зарегистрировать данную ситуацию и перестроить планируемый маршрут на новый.
Ровер «Юйту-2» также может подниматься по небольшим склонам и пересекать каменистую поверхность. Но основной фронт его работы — движение по плоской горизонтальной поверхности и лунному грунту.
Так что же это за такой прибор «спектрометр VNIS», установленный на борту ровера «Юйту-2»?
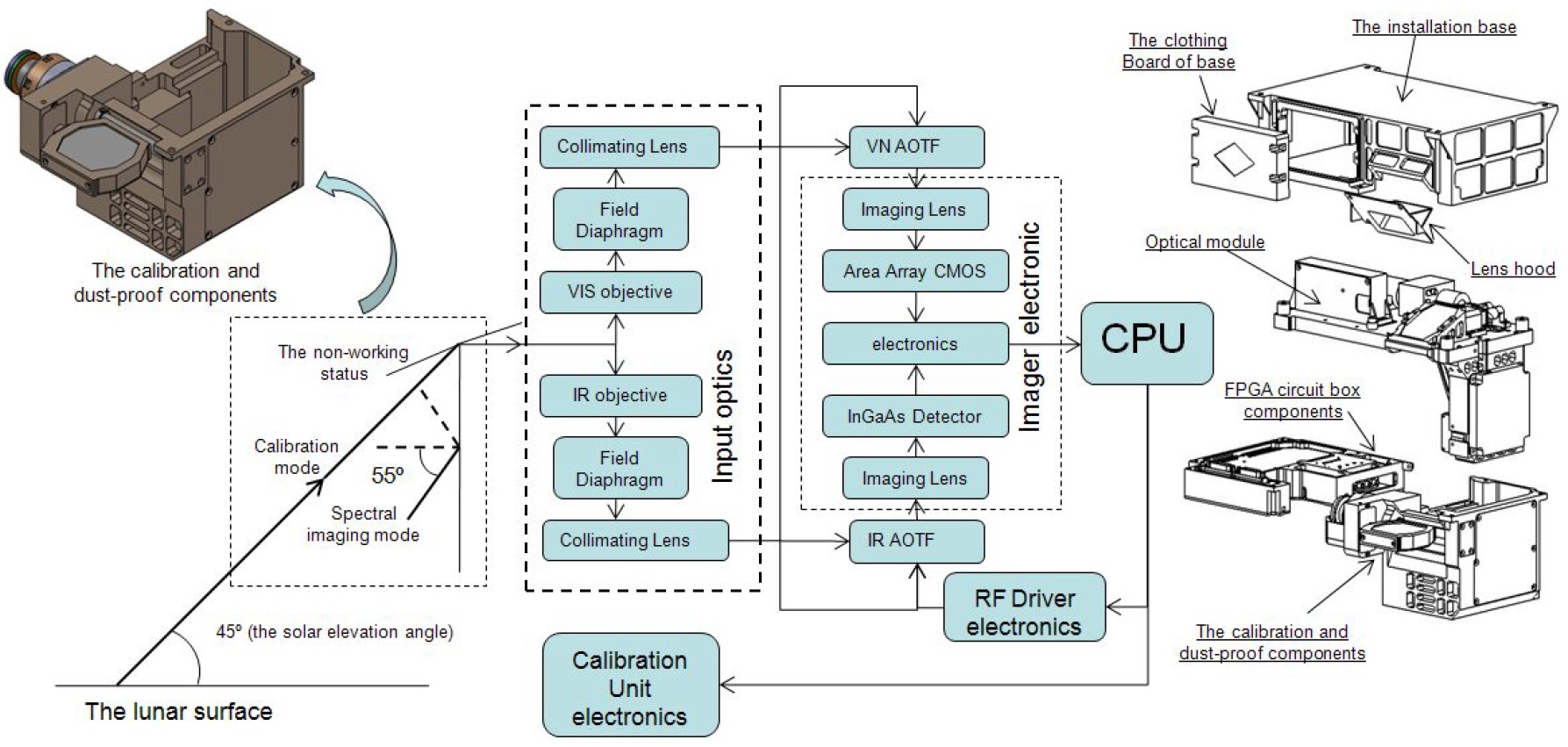
Лунный инфракрасный спектрометр VNIS (The Visible and Near-Infrared Imaging Spectrometer) был разработан в Шанхайском институте технической физики Китайской академии наук.
В спектрометре используется неколлинеарные акустооптические перестраиваемые фильтры, он состоит из видеоспектрометра VIS/NIR (0,45–0,95 мкм) и коротковолнового ИК-спектрометра (0,9–2,4 мкм), также в его составе есть калибровочный блок с защитой от пыли и загрязнений.
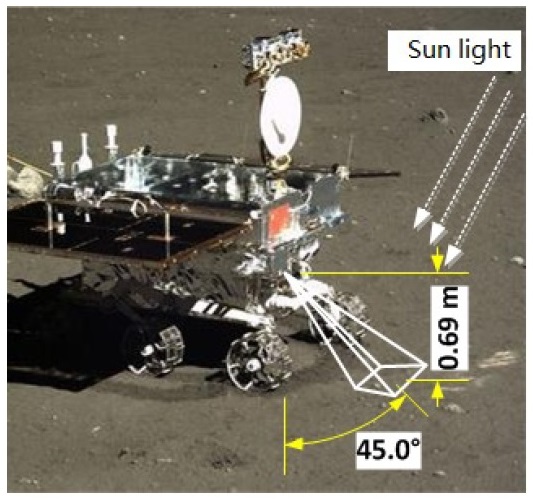
Спектрометр установлен спереди на борту ровера «Юйту-2», имеет следующие ограничения по позиционированию и работе с лунным материалом:
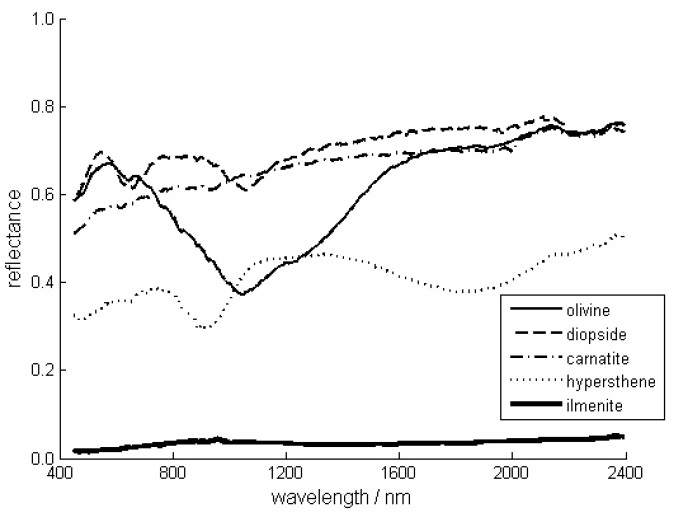
Минералы, такие как пироксен, плагиоклаз, оливин и ильменит, которые составляют большую часть лунных поверхностных пород, имеют отличительные спектральные характеристики:
Структурная схема работы спектрометра:
Основные технические характеристики спектрометра:

Внешний вид спектрометра:

Геометрические размеры окна детекции:
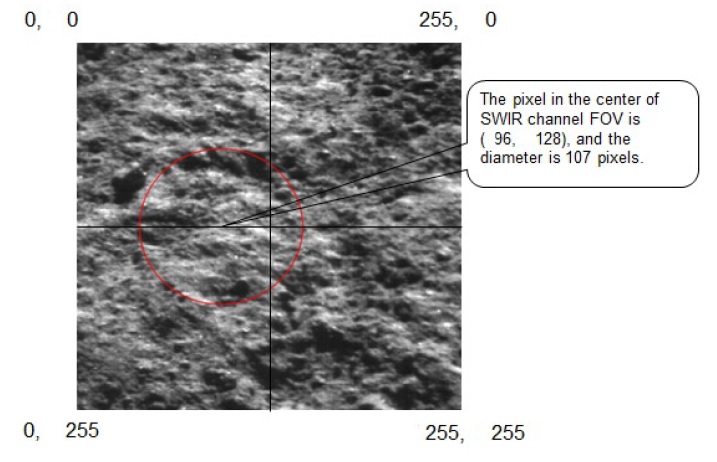
Данные, получаемые спектрометром:
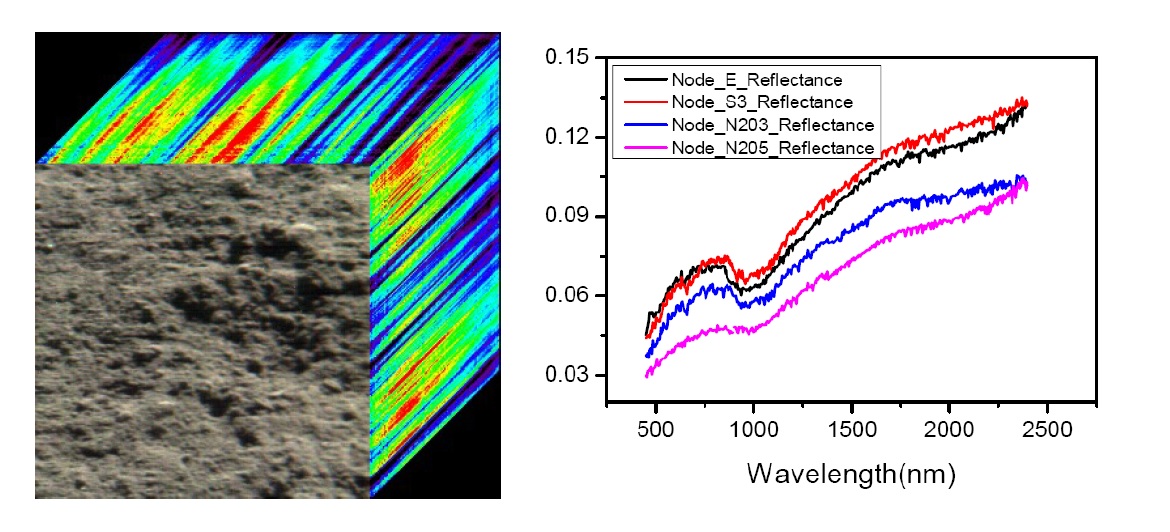
В третий лунный день ровер «Юйту-2» занимался получением научных данных с использованием бортового стационарного спектрометра VNIS (Visible and Near-Infrared Imaging Spectrometer), у которого ширина поля зрения датчика составляет всего несколько сантиметров, поэтому необходимо очень точно и аккуратно позиционировать ровер «Юйту-2», чтобы можно было выводить «глаз» спектрометра на нужный участок лунной поверхности получать корректные данные с оптимального расстояния.
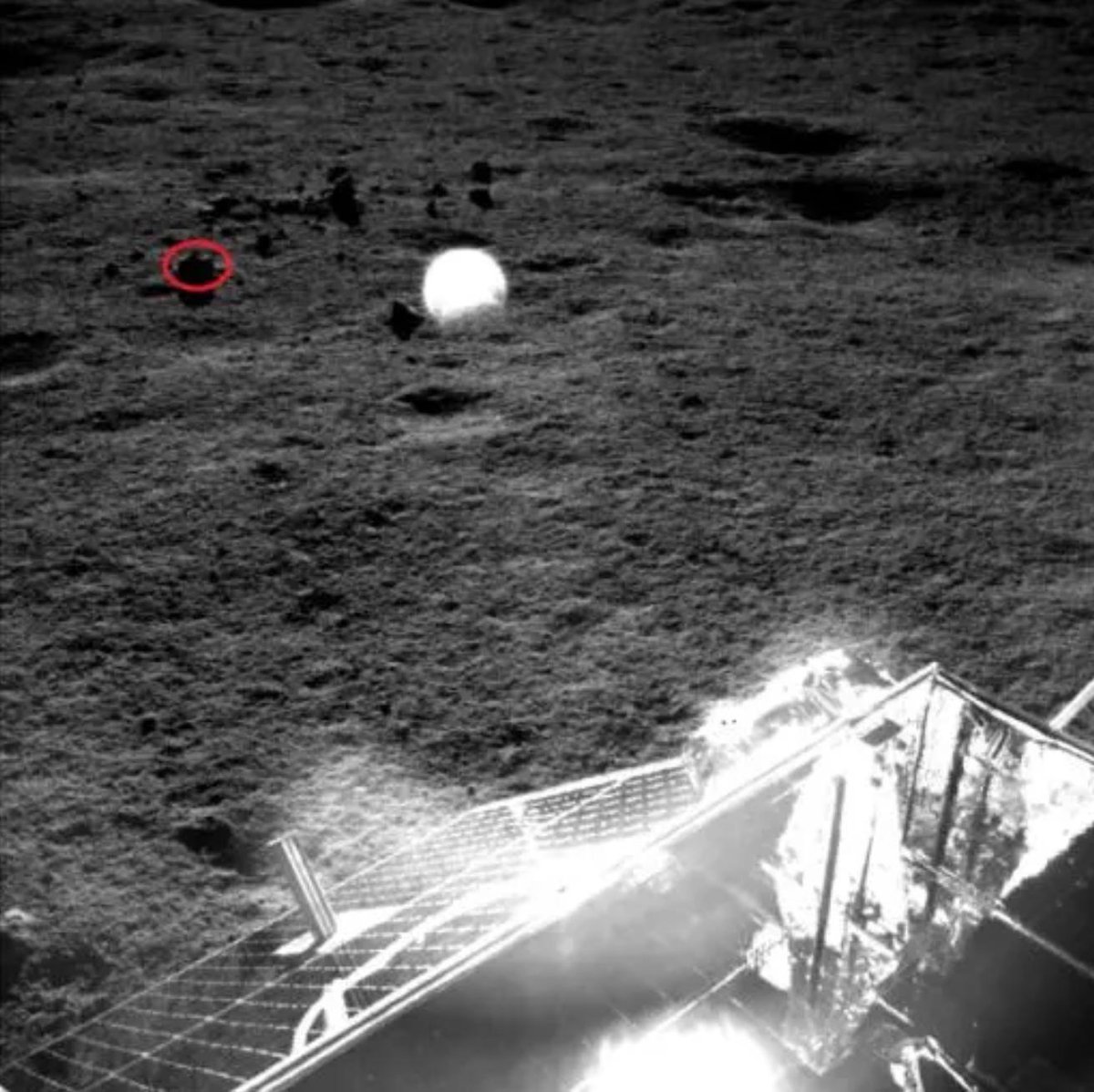
После своей небольшой прогулке по Луне, ровер «Юйту-2» достиг интересной каменной «полянки», в центре которой был обнаружен большой камень диаметром 20 сантиметров. Ученых сразу заинтересовал эта находка, ее происхождение (метеорит, лунное образование) и процесс образования.
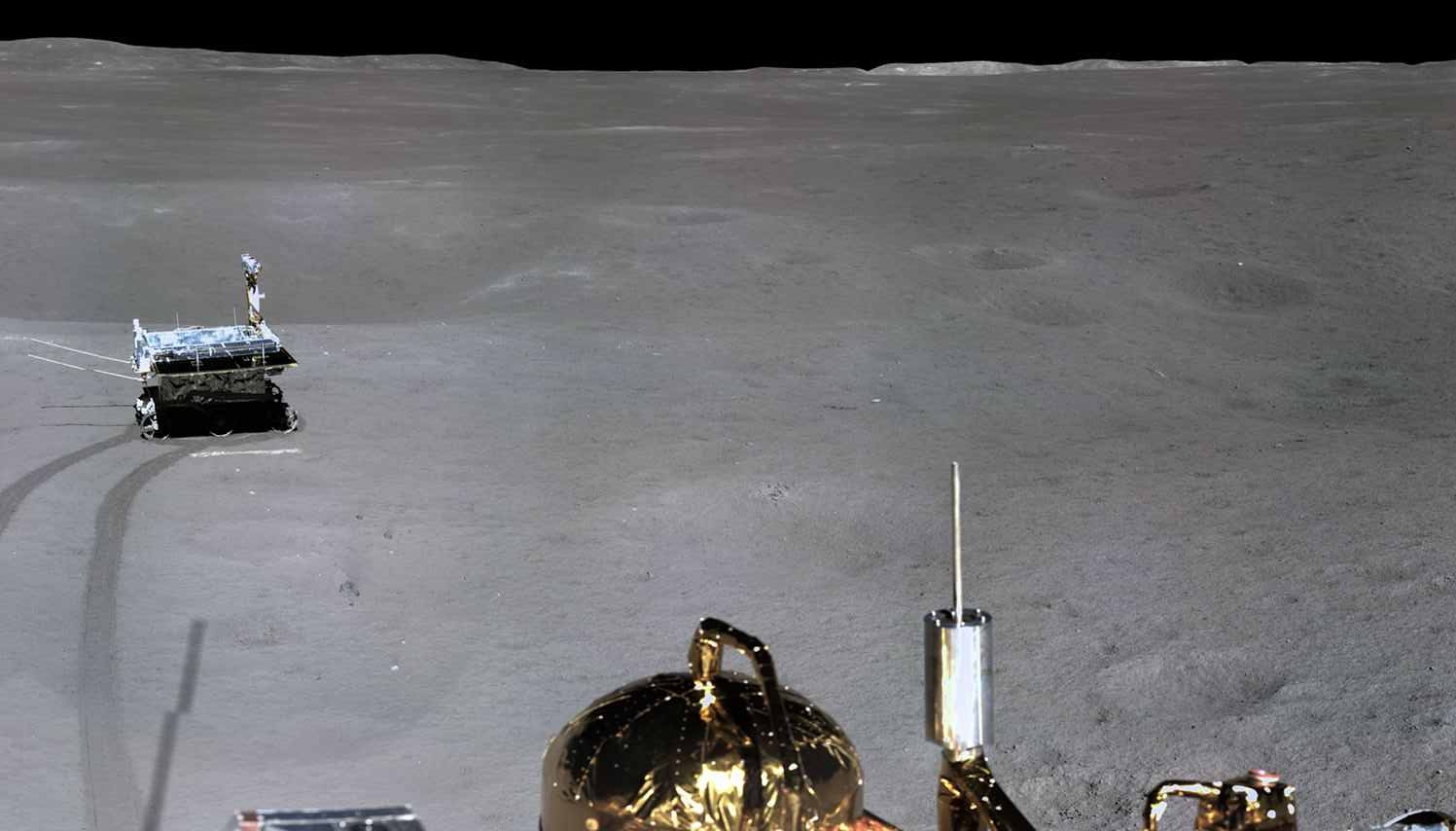
Общий вид панорамы поверхности во время поиска камней:

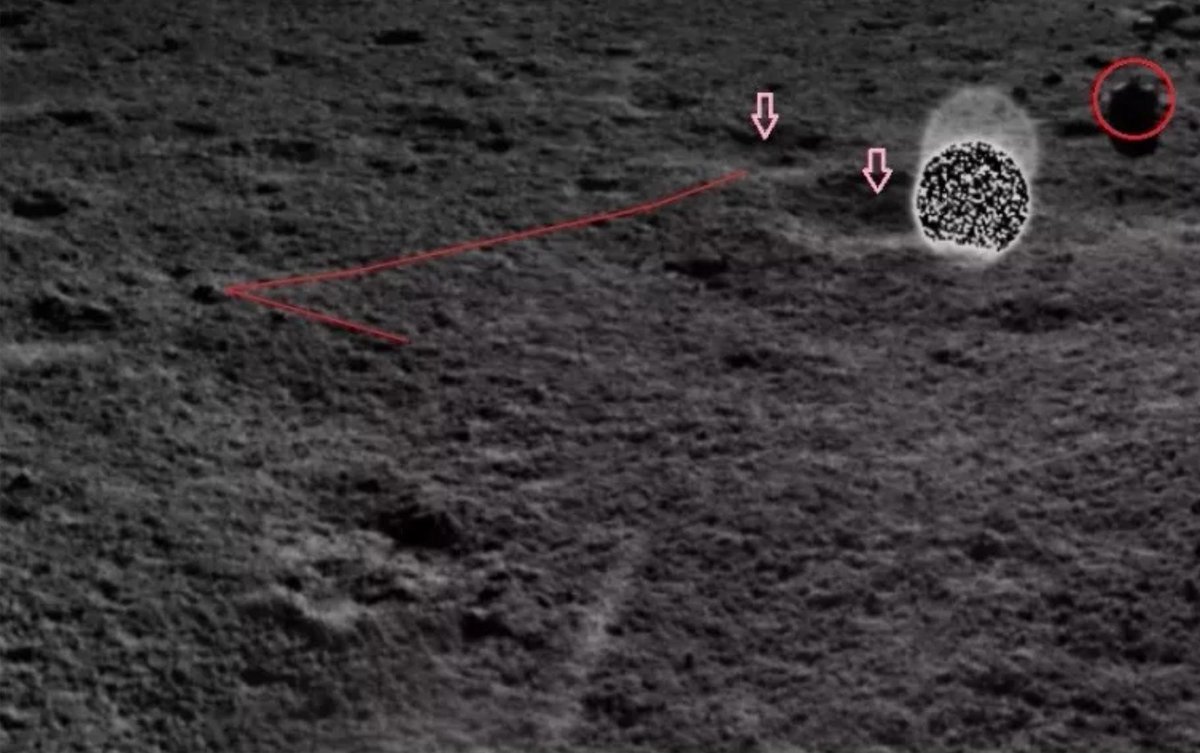
Каменистая поверхность, до большого камня (его диаметр 20 сантиметров) расстояние 120 сантиметров:

Увеличенное изображение большого камня:


Работа со спектрометром:
Далее, данные со спектрометром ровера «Юйту-2» передаются в аэрокосмический центр управления Китайской академия космических технологий, где они анализируются, хранятся и будут открыты научному обществу.
По объему данных тоже интересный момент, например, ровер «Юйту-2» после выполнения измерений с помощью спектрометра в четырех разных точках лунной поверхности передал общий объем данных размером 350 МБ.
Научные измерения элементов лунной поверхности и передачу данных с приборов ровера «Юйту-2» планируется продолжить в четвертый лунный день.
