Магия тензорной алгебры: Часть 18 — Математическое моделирование эффекта Джанибекова
Прошлая статья должна была быть о численном моделировании эффекта Джанибекова, но мне внезапно пришла в голову мысль, что этот эффект можно исследовать качественно, пусть и довольно приближенным первым методом Ляпунова. Однако, численное моделирование тоже весьма интересный вопрос, тем более лежащий в плоскости моих исследовательских задач. Поэтому, сегодня мы
- Окончательно определимся с тем, как использовать параметры Родрига-Гамильтона для описание ориентации тела в пространстве
- Рассмотрим формы представления уравнений движения свободного тела: покажем как тензорные уравнения можно превратить в матричные и компонентные.
- Выполним моделирование движения свободного твердого тела при различных соотношениях между главными моментами инерции и покажем, как проявляет себя эффект Джанибекова.
Мы уже не раз рассматривали эти уравнения в векторном виде
Векторная форма записи удобна для общего анализа характера зависимостей, она привычна и в ней видно, что означает конкретное слагаемое. Однако, для дальнейшего преобразования уравнений в форму, удобную для моделирования, перейдем к тензорной записи
где — контравариантные координаты центра масс тела;
— контравариантные компоненты главного вектора внешних сил, приложенных к телу;
— контравариантные компоненты главного момента внешних сил, приложенных к телу.
Система уравнений (2) уже является замкнутой, интегрируя её можно получить закон движения центра масс и зависимость угловой скорости тела от времени. Но, нас ещё будет интересовать ориентация тела, поэтому дополним данную систему уравнений
Уравнение (3) есть ничто иное как представление компонент угловой скорости через параметры ориентации Родрига-Гамильтона. Это выражение мы уже получали в предыдущих статьях. Теперь мы будем рассматривать его как дифференциальное уравнение, связывающее параметры ориентации с компонентами угловой скорости.
Однако, параметры Родрига-Гамильтона являются избыточными — их четыре, а для описания ориентации тела в пространстве достаточно трех координат. И число неизвестных в системе (2), (3) превышает число уравнений на единицу. Значит нам придется дополнить уравнения (2) и (3) уравнением связи между параметрами ориентации. В статье о параметрах Родрига-Гамильтона мы показали, что поворот тела удобно описывать единичным кватернионом, что есть
или, в тензорном виде
Продифференцируем (4) по времени
С учетом коммутативности скалярного произведения полагаем , тогда
и есть искомое уравнение связи. Полная система уравнений движения свободного твердого тела в тензорной форме будет иметь вид
Довольно страшновато — (6) содержит 13 нелинейных дифференциальных уравнений первого порядка с 13 неизвестными величинами. Страшно выглядит из-за общей тензорной записи, но при переходе к конкретным координатам, в нашем случае декартовым, система (6) значительно упростится.
Введем вектор-столбец фазовых координат тела
где и
— положение и скорость центра масс тела;
и
— ориентация и угловая скорость тела.
В декартовом базисе метрический тензор представлен единичной матрицей, а символы Кристоффеля равны нулю, поэтому система уравнений (6) в матричной форме запишется так
где введены матрицы
Разрешая систему (7) относительно первых производных, получаем
систему уравнений движения в форме Коши.
В отсутствие внешних силовых факторов правая часть системы (8) равна нулю, и уравнение движения центра масс интегрируется легко, с учетом начальных условий
Вращение гайки описывается системой семи уравнений первого порядка, которые получаем из (8), вводя безразмерные моменты инерции и
Для численного интегрирования системы (9) зададим начальные условия
где — угловая скорость гайки после схода с резьбы;
— начальное возмущение угловой скорости
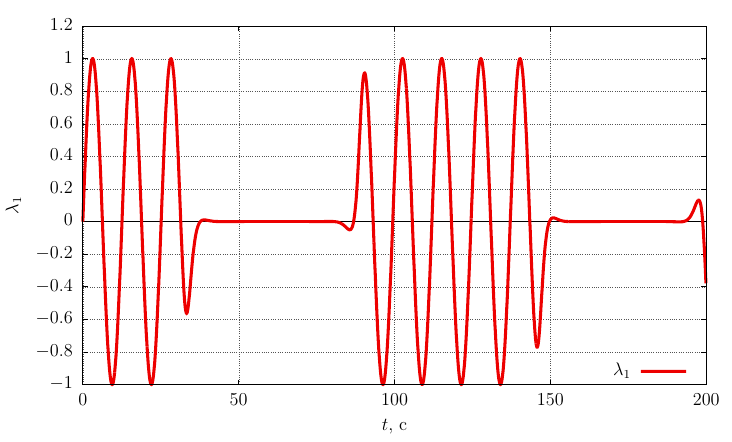
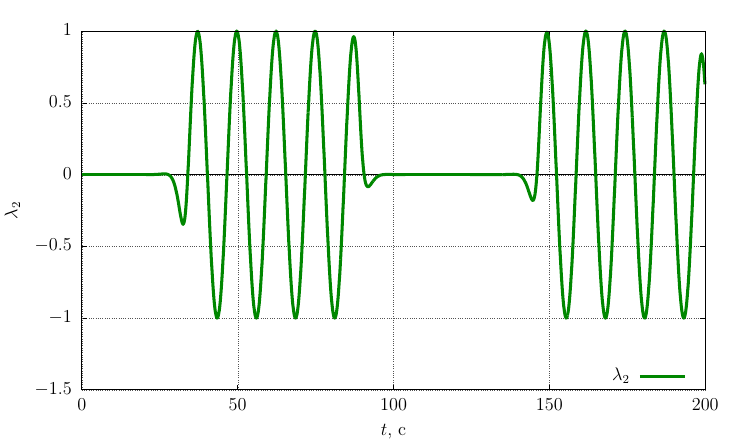
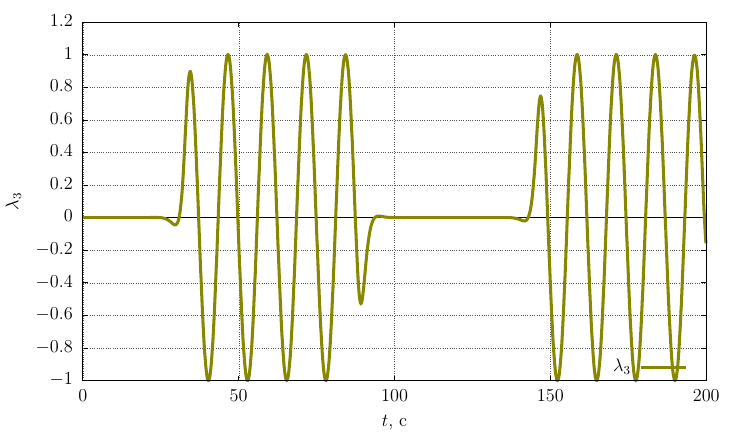
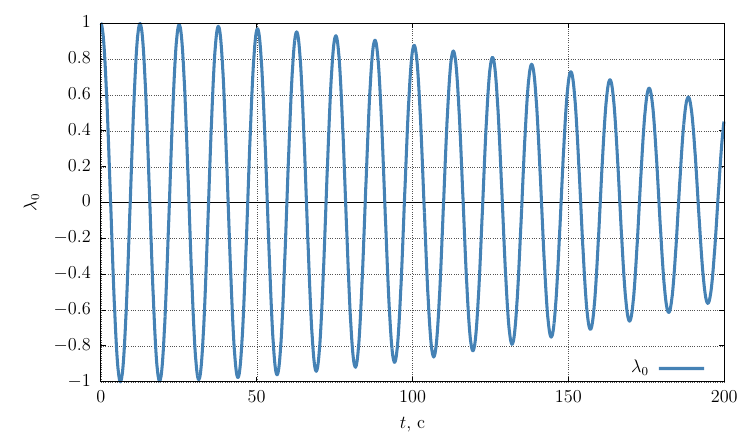
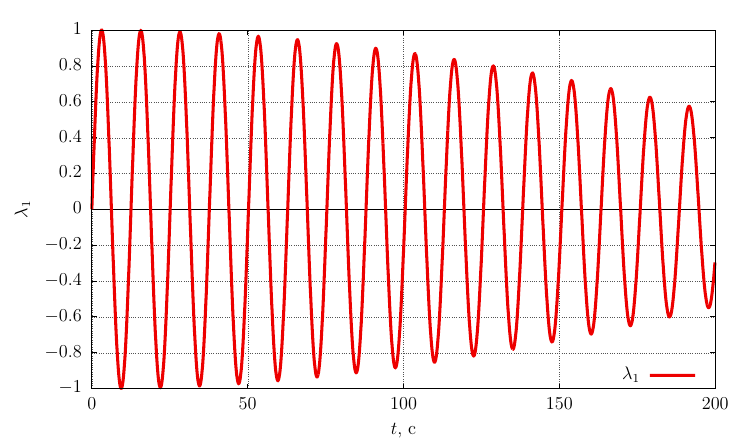
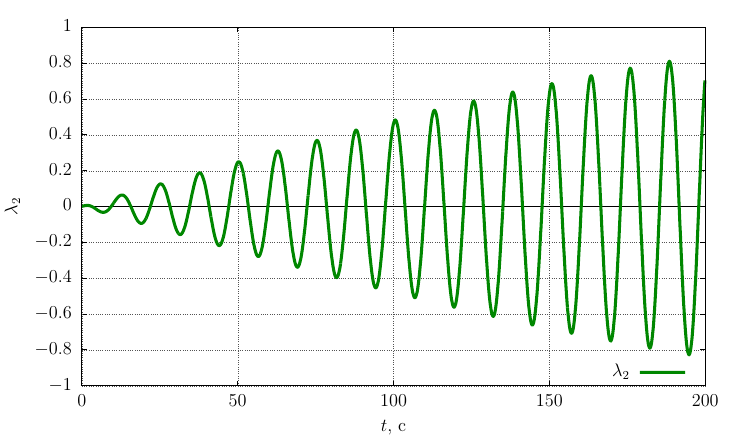
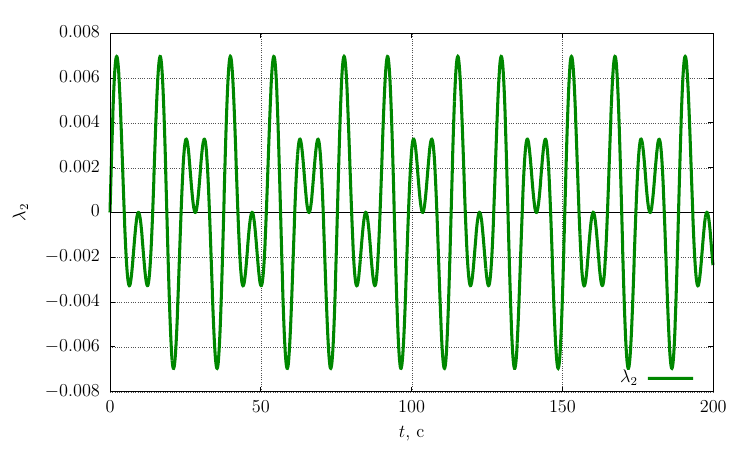
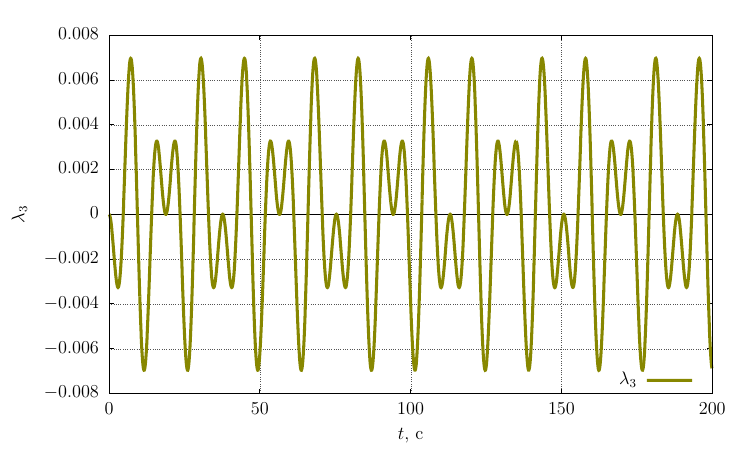
При значениях параметров , рад/с,
, рад/с, движение гайки происходит следующим образом
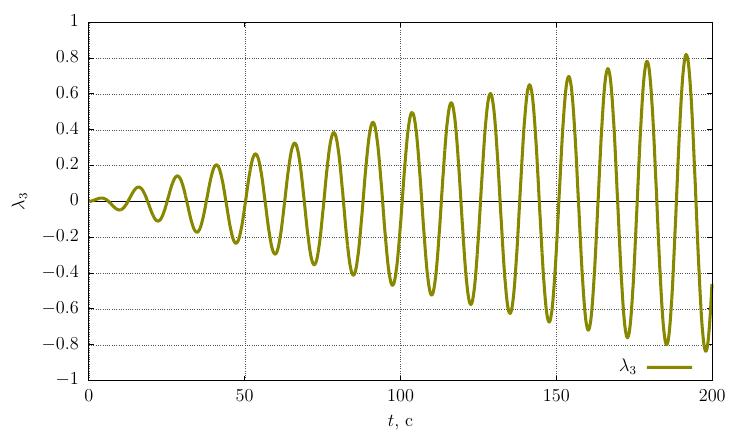
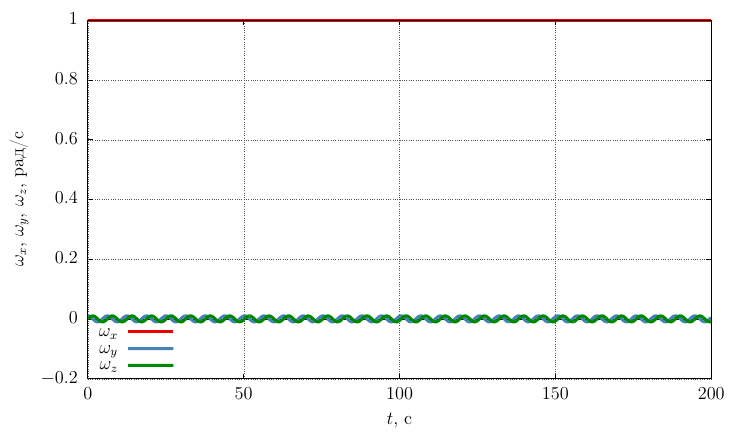
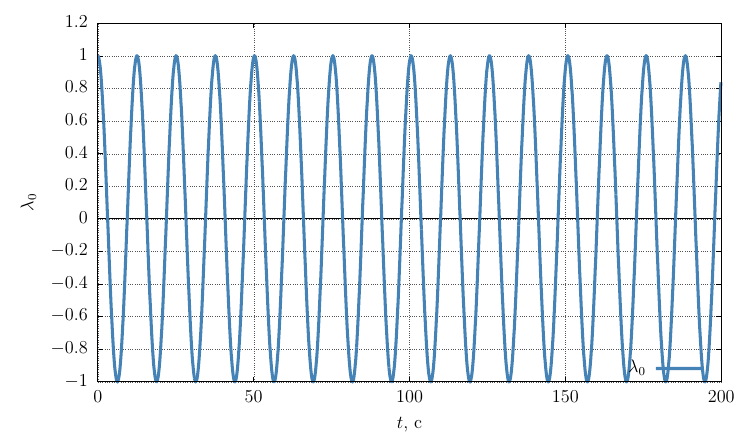
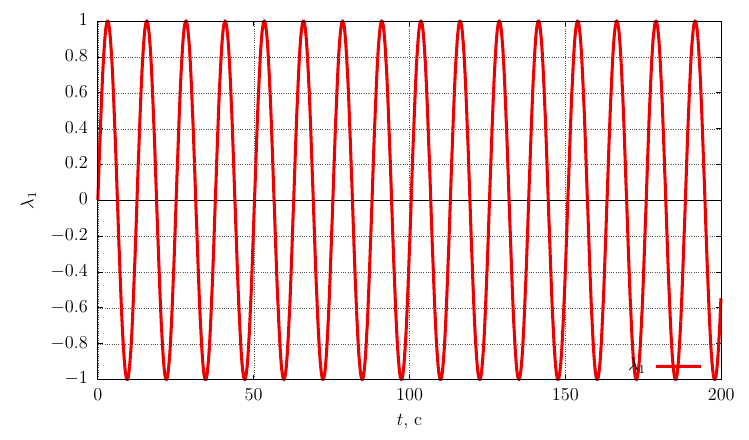
Параметры ориентации Родрига-Гамильтона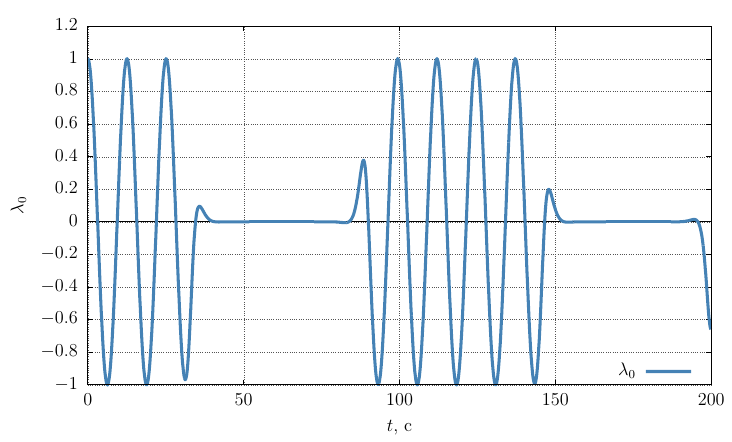
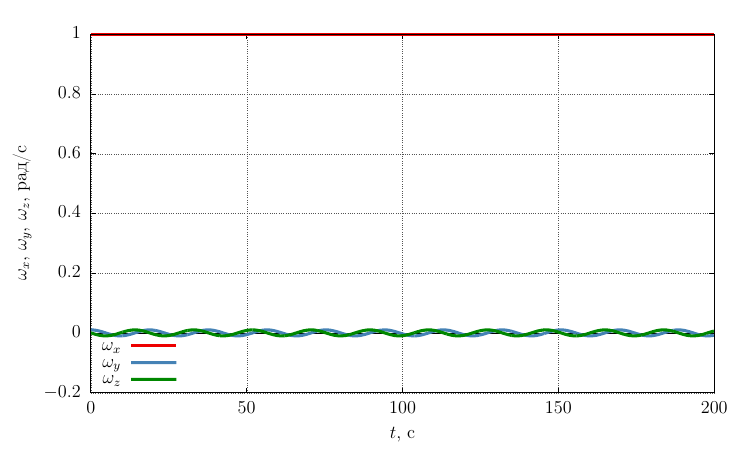
Проекции угловой скорости на собственные оси
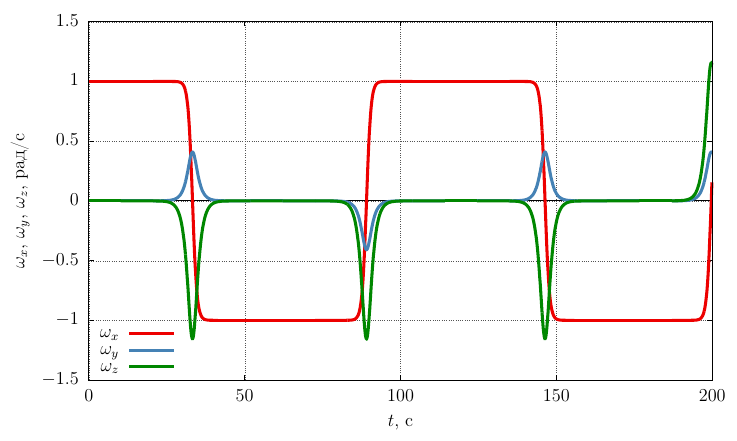
Из графиков видно, что при , весьма незначительное возмущение вектора угловой скорости приводит к периодическому лавинообразному изменению ориентации гайки в пространстве.
Сравним полученный результат с движением тела, закрученным вокруг оси с максимальным моментом инерции, то есть положим , задав следующие значения параметров
, рад/с,
, рад/с
Параметры ориентации Родрига-Гамильтона
Проекции угловой скорости на собственные оси
Видно, что при достаточно значительном возмущении угловой скорости движение остается устойчивым вращением вокруг оси с небольшой прецессией.
Похожая картина наблюдается для тела, закручиваемого вокруг оси с минимальным моментом инерции ()
, рад/с,
, рад/с
Параметры ориентации Родрига-Гамильтона
Проекции угловой скорости на собственные оси
Частота прецессии существенно меньше, чем при закрутке вокруг оси с максимальным моментом инерции, что логично, так как колебания происходят вокруг оси с большим моментом инерции, чем в случае .
Все расчеты выполнены автором в СКА Maple 18. Графики построены из лога расчета связкой Kile + LaTeX + gnuplot.
Хотелось бы ещё сделать анимацию, однако опыт автора в этом вопросе крайне мал. Поэтому хотел бы задать вопрос читателям — существует ли ПО (для Linux/Windows), с помощью которого имея набор значений параметров кватерниона ориентации в зависимости от времени сделать анимационный ролик, иллюстрирующий движение тела? Подозреваю, что подобное можно провернуть с Blender 3D, но не уверен.
А пока что, благодарю за внимание!
Продолжение следует…
