Learning to learn. Создаём self-improving AI
Learning to learn
В этот раз я проводил эксперименты на тему learning to learn, то есть алгоритмов, которые могут учиться, как лучше учиться.
Цели эксперимента:
1) Создать алгоритм оптимизации, который можно некоторым стандартным способом приспособить к любой оптимизационной задаче или множеству задач. Под словом «приспособить» я имею в виду «сделать, чтобы алгоритм очень хорошо справлялся с этой задачей».
2) Подстроить алгоритм под одну задачу и посмотреть, как изменилась его эффективность на других задачах.
Почему алгоритмы оптимизации вообще важны?
Потому что очень многие задачи можно свести к задачам оптимизации. Например, в этой статье вы можете увидеть, как свести задачу управления транспортным средством к задаче оптимизации.
В примере мы будем тестировать алгоритм на более традиционных задачах оптимизации, так как этот тест займёт меньше времени, чем обучение нейросети.
Список задач
Задачи у нашего алгоритма будут следующие:
1) Задача на полиномиальную регрессию. Дана некоторая функция, надо построить кривую, которая будет аппроксимировать график этой функции графиком многочлена 7-ой степени. Оптимизатор подбирает коэффициенты регрессии. Метрика качества в этой задаче равна среднему отклонению между реальным графиком и аппроксимацией. У функции много локальных оптимумов, но она гладкая.
2) Задача на квадратичную функцию. Метрика качества q=(k1–10)^2+(k2+15)^2+(k3+10*k4–0.06)^2+…, то есть она равна сумме квадратов от неких линейных функций от коэффициентов, которые подбирает оптимизатор. У функции много локальных оптимумов, но она гладкая.
3) Задача на дискретную функцию. Метрика качества рассчитывается по алгоритму вида: q=1; если (k1>-2){q+=3}; если (k1<0.2){q+=15};…, то есть график функции от любой переменной будет выглядеть как некоторая ступенчатая линия. У функции мало локальных оптимумов, но она негладкая.
В качестве тренировочной задачи я буду применять задачу 2 (на квадратичную функцию), в качестве тестовых — остальные две.
Оптимизатор
В качестве оптимизирующего алгоритма я буду использовать свой самописный ансамбль алгоритмов, который я назвал Абатуром. Данный ансамбль включает в себя несколько вариантов покоординатного спуска, градиентный спуск, эволюцию, алгоритм пчелиного роя. И управляющий алгоритм, который с разной вероятностью вызывает разные модули.
В Абатуре есть множество параметров, каждый из которых можно поменять, например, шаг в модуле градиентного спуска и число особей в эволюционном модуле. Сам Абатур не может изменить эти параметры, но их может изменить какой-нибудь другой алгоритм, который занимается оптимизацией Абатура.
Метрика качества learning to learn
Для оптимизации способности к оптимизации надо каким-то способом измерять эту самую способность к оптимизации. Я применял метрику lrvt (logarithm-relative-value-time).
Lrvt=((log (abs (valOld/valNew))/log (10)))/log (dt+10)
ValOld — метрика качества до оптимизации
ValNew — метрика качества после оптимизации
Dt — количество вычислений оптимизируемой функции в ходе оптимизации.
Эту метрику я не придумал единоразово, это результат длительной эволюции моих метрик качества. Эта метрика коррелирует с valOld/valNew, то есть с количественным значением апгрейда и антикоррелирует с dt, то есть затратами времени на апгрейд.
Испытание 1. Градиентный спуск.
Запустим алгоритм градиентного спуска на всех трёх перечисленных задачах — просто, чтобы было, с чем сравнивать Абатур. По горизонтальной оси откладывается номер шага, по вертикальной — метрика качества (идеальное решение найдено, если она равна 0).
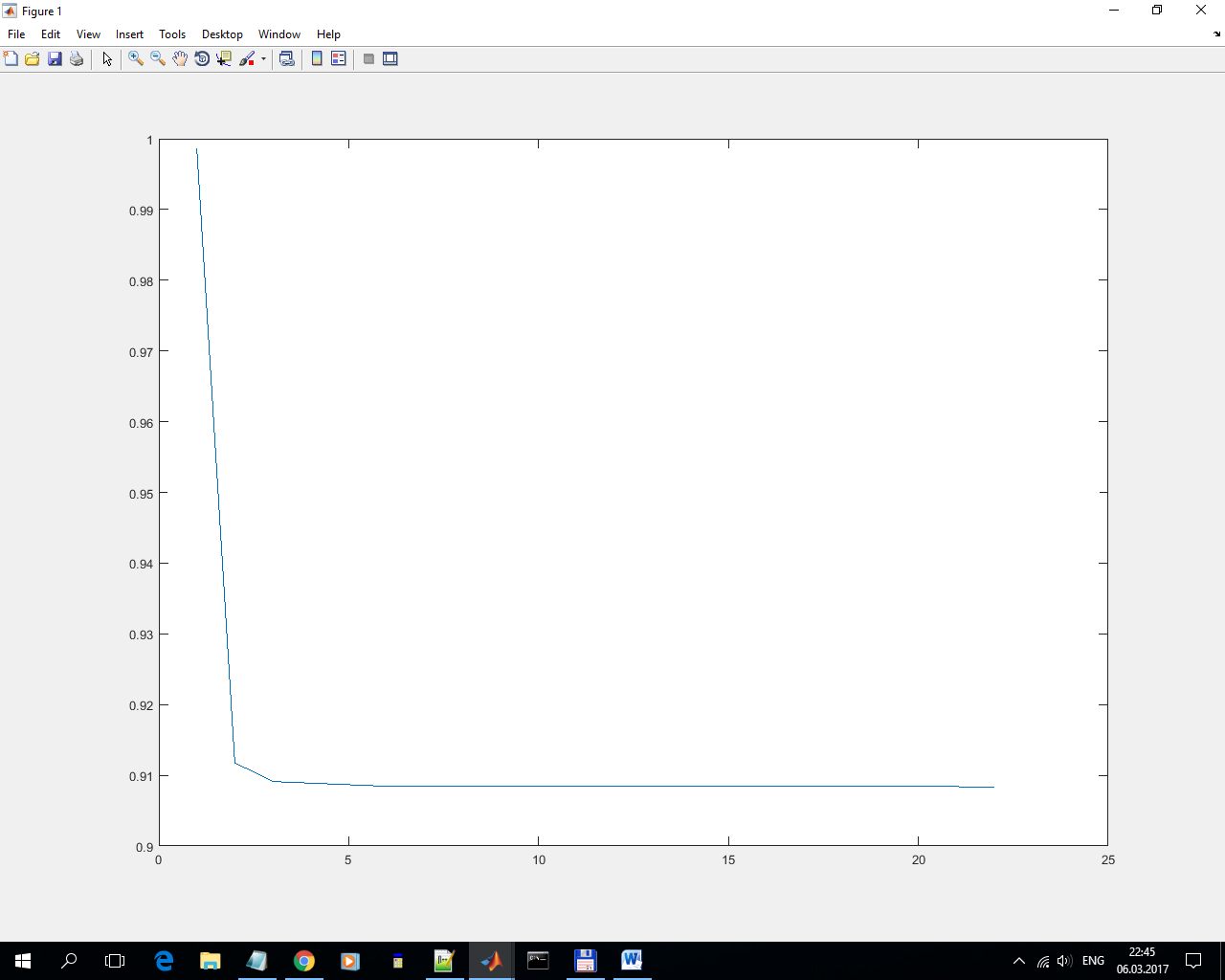
1) Регрессия.

Градиентный спуск снизил q с 1.002 до 0.988 за 100 тактов. Слабовато, но стабильно.
2) Квадратичная функция

Градиентный спуск снизил q со 140 до примерно 5 за 100 тактов. Сильно, но алгоритм уже вышел в насыщение.
3) Дискретная функция
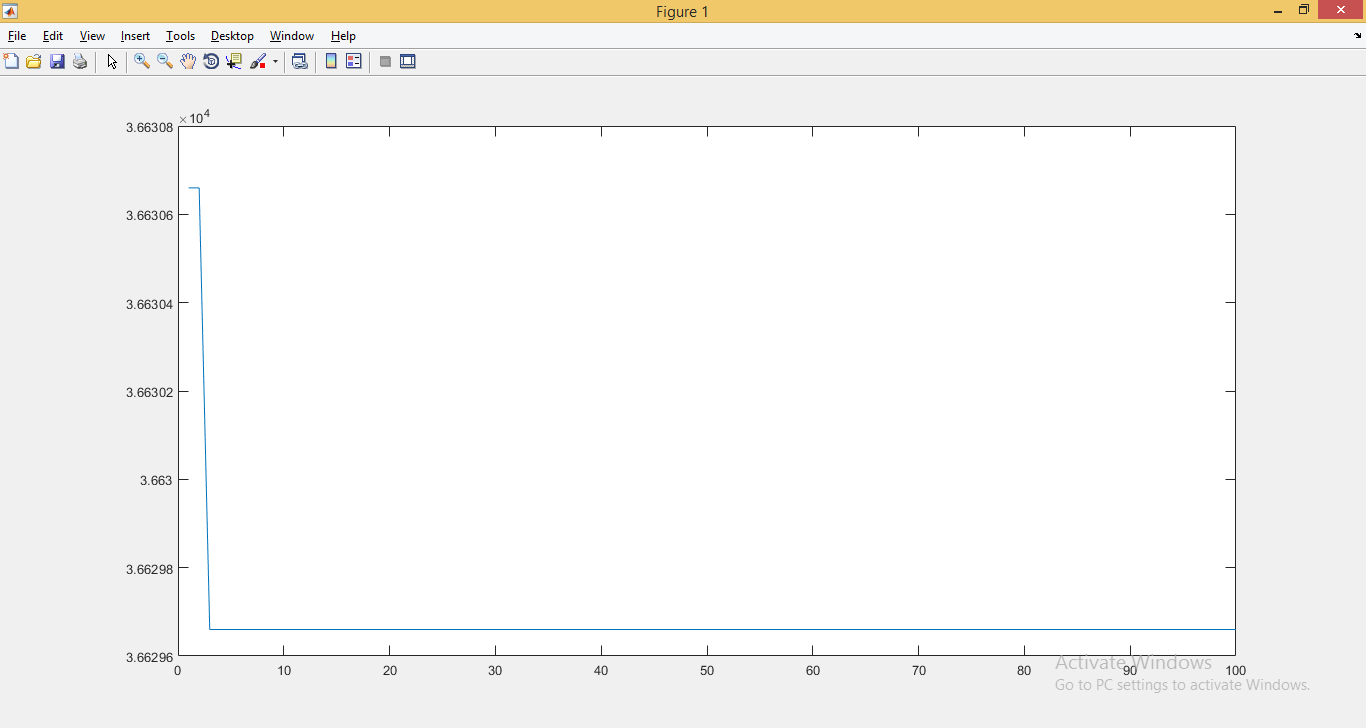
Градиентный спуск снизил q со 3663.06 до 3662.98 за 100 тактов. Очень слабо, очень непостоянно.
Испытание 2. Абатур с настройками по умолчанию.
Теперь запустим на этих же задачах Абатур со стандартными настройками.
1) Регрессия
Снизил q с 1 до 0.91 за 20 тактов (за остальные 80 тактов он ничего не сделал). Слабовато, но намного сильнее, чем градиентный спуск (который снизил с 1.002 до 0.988). И крайне нестабильно.
2) Квадратичная функция.

Снизил q со 189 до 179 за 50 тактов (градиентный спуск снизил q со 140 до примерно 5). В данной ситуации Абатур показал себя нестабильным и малоэффективным.
3) Дискретная функция.
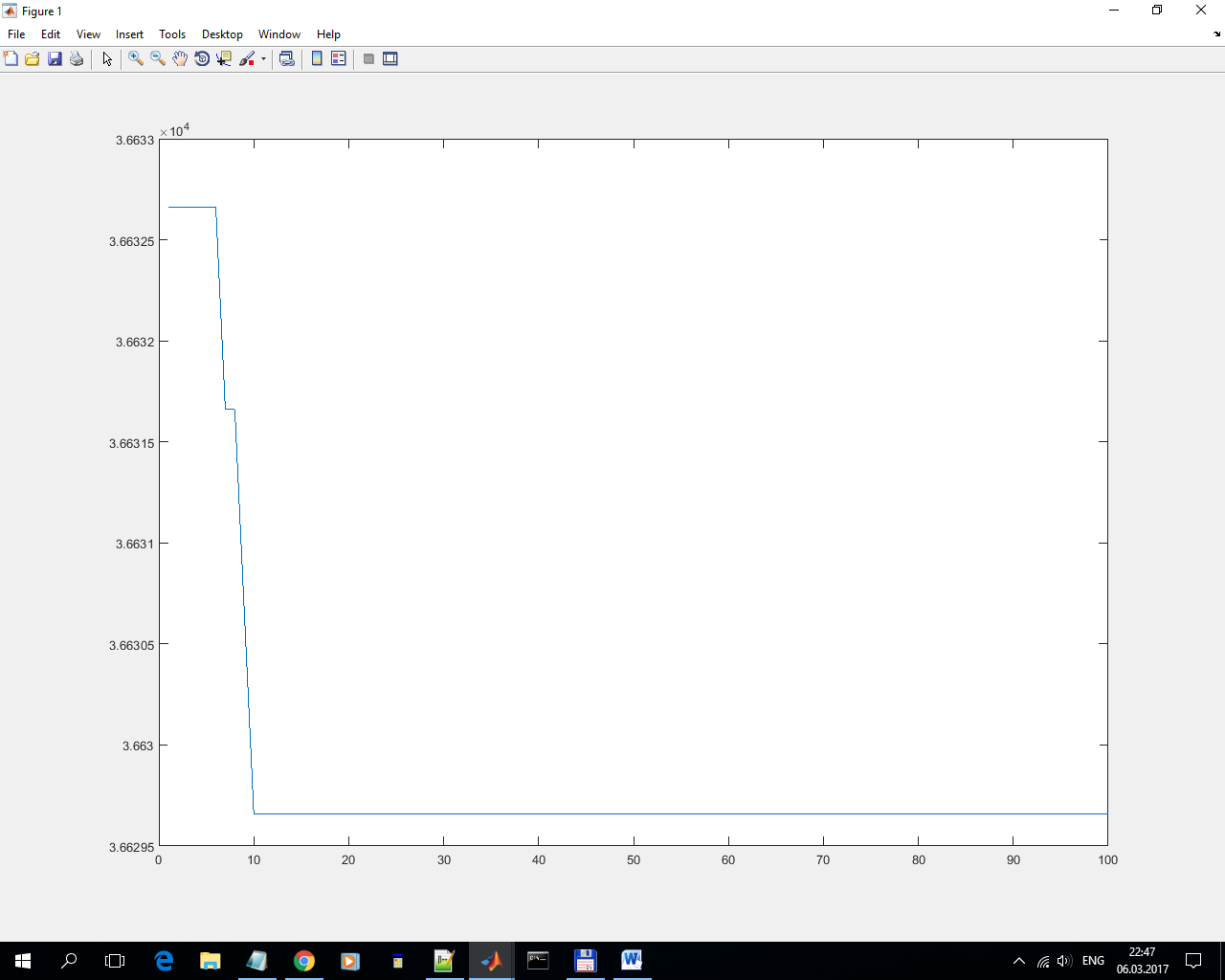
Снизил q со 3663.27 до 3662.98. Очень слабо, очень нестабильно.
Испытание 3. Абатур обученный.
Обучаем Абатур на квадратичной функции. В качестве обучающего алгоритма используем Абатур со стандартными настройками.
1) Регрессия.
Синими линиями показан процесс оптимизации до обучения. Красными — после.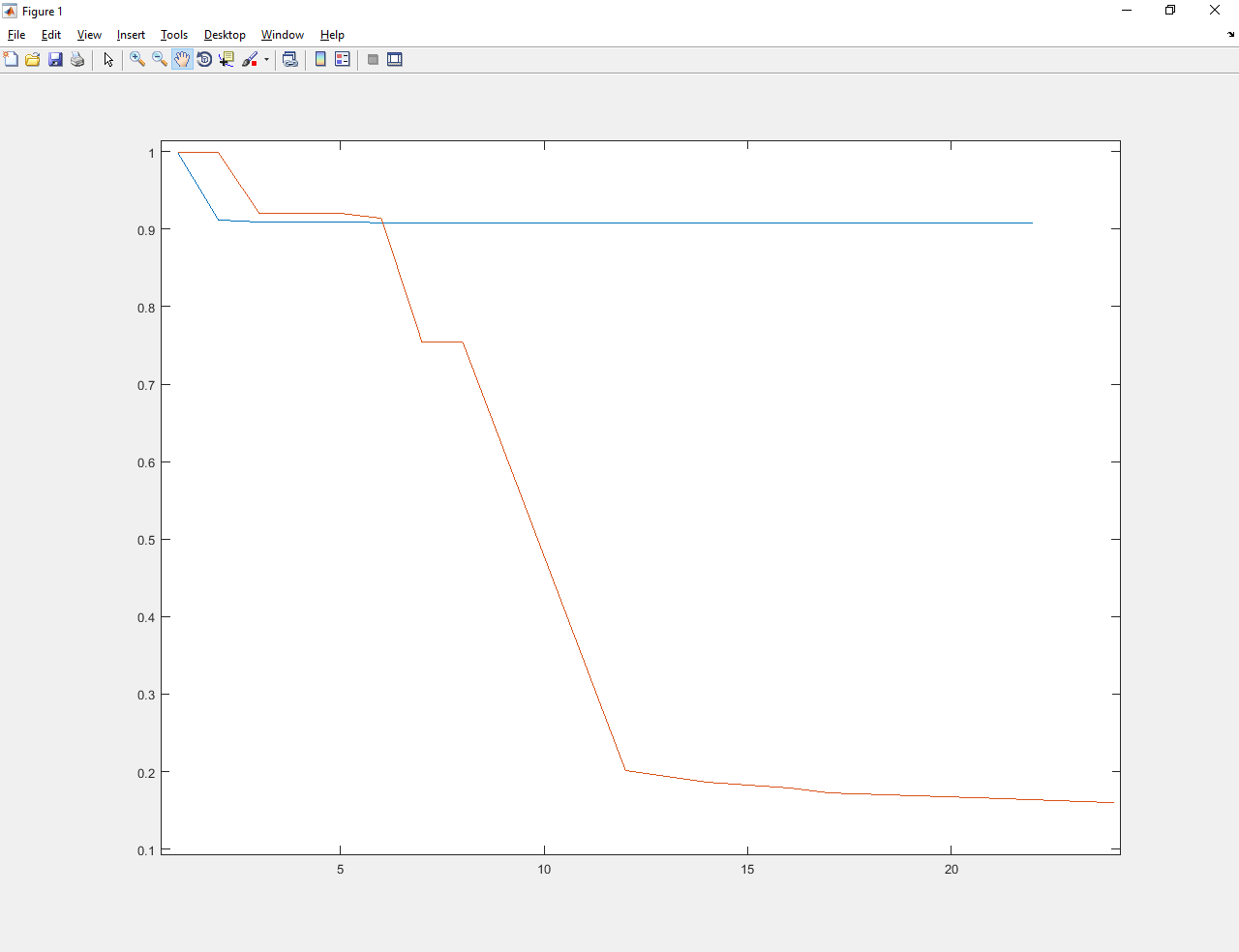
Абатур обученный улучшил значение с примерно 1 до примерно 0.17. Намного лучше и старого Абатура, и градиентного спуска.
2) Квадратичная функция.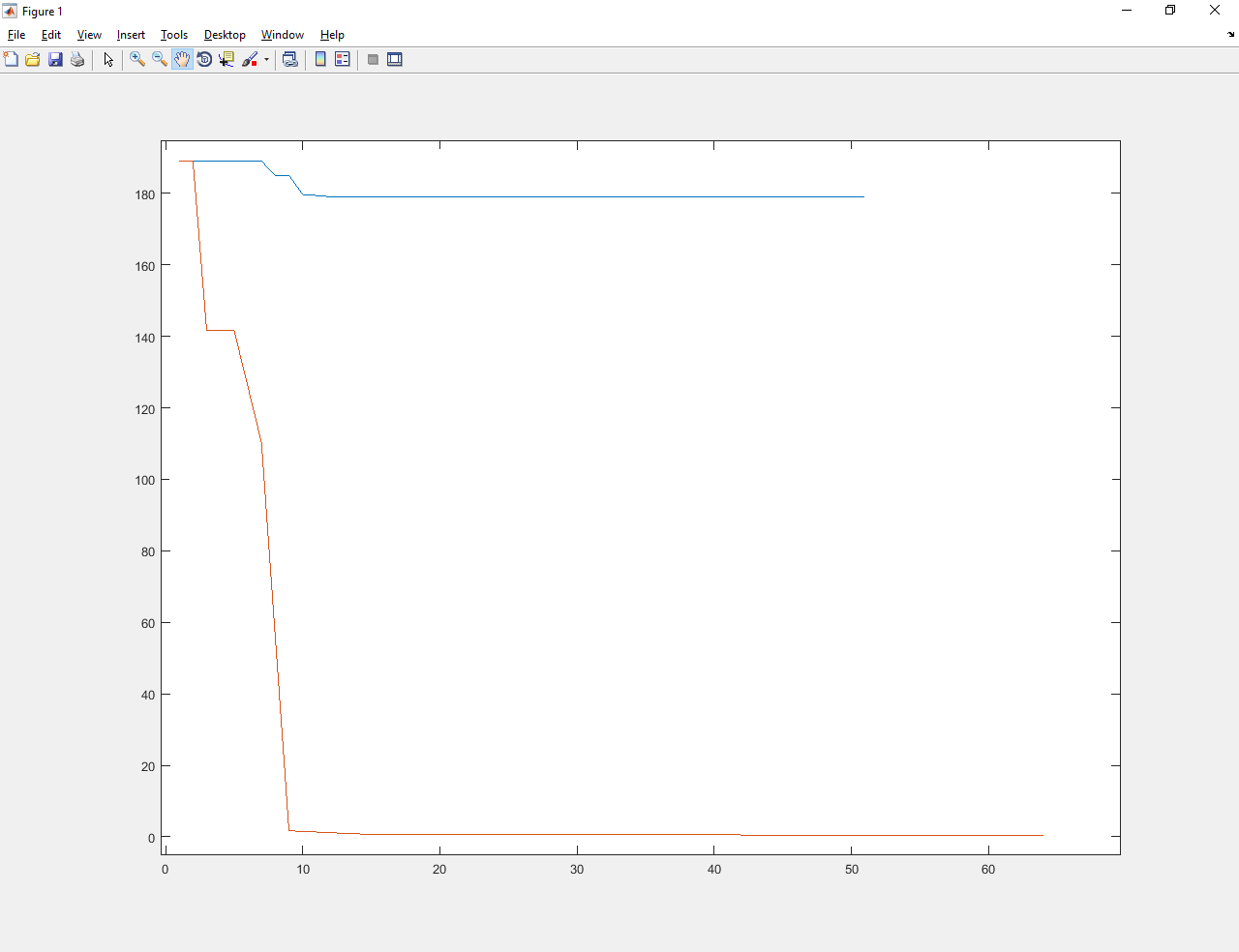
Абатур обученный улучшил значение с примерно 190 до числа меньше 1. Намного лучше и старого Абатура, и градиентного спуска.
3) Дискретная функция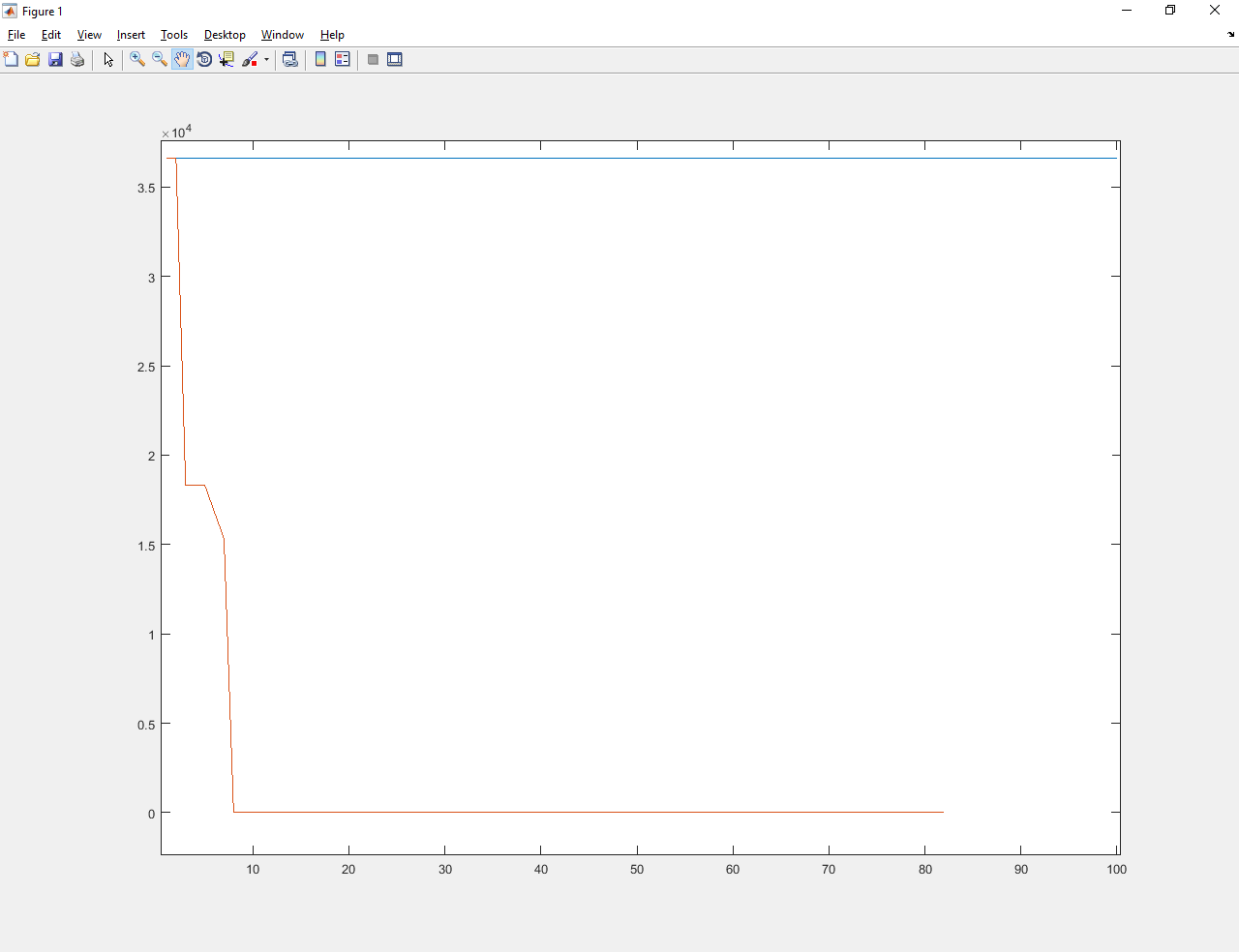
Абатур обученный улучшил значение с примерно 3600 до 0.01. Намного лучше и старого Абатура, и градиентного спуска (которые вообще не справились).
Резюме
1) Обучаемый алгоритм оптимизации создан. Оболочка для его обучения создана.
2) Я обучил Абатур на одной задаче. Он стал лучше решать все перечисленные задачи. Следовательно, алгоритм подобрал эвристики, которые в сумме пригодны для решения любой задачи из списка.
Источники литературы:
1) «Learning to learn by gradient descent by gradient descent»
2) «Metalearning»
Комментарии (1)
 QDeathNick
QDeathNick
9 марта 2017 в 12:47
+2↑
↓
Как ИИ вы назовёте так он и учиться будет :)
