Кватернионы. Решение одной навигационной задачи
История
Некоторое время назад я занимался одной интересной задачей, относящейся к спутниковой навигации. Используя фазовый фронт сигнала, объект навигации (ОНВ) измеряет координаты навигационных спутников (НС) в своей системе координат (локальная система, ЛСК). Также ОНВ получает значения положений НС в глобальной системе координат (ГСК), и измеряет время получения сигнала НС (рис. 1). Требовалось вычислить координаты ОНВ в ГСК и системное время, то есть решить навигационную задачу.
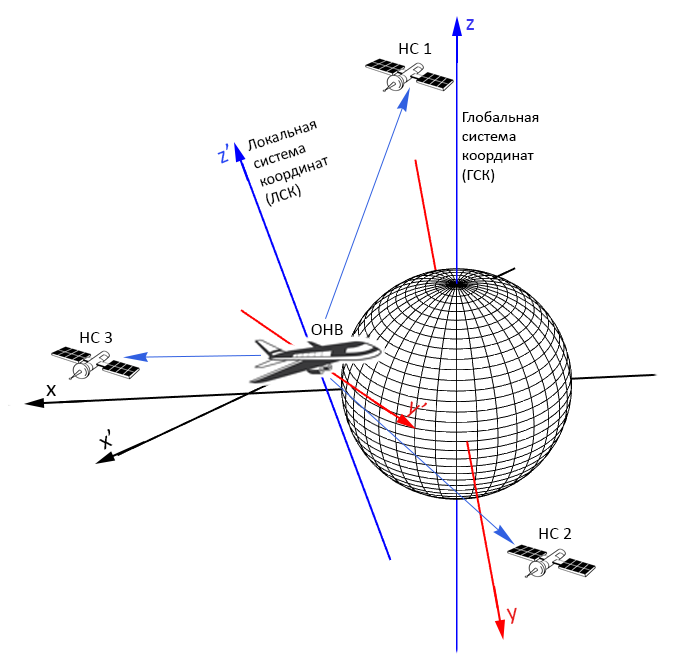 Рис. 1. Системы координат
Рис. 1. Системы координатЗадача была интересна тем, что её решение теоретически позволяет уменьшить число НС в сравнении с тем, сколько НС требуется в методах, реализованных в спутниковых системах навигации. Своё внимание в то время я в основном уделял исследованию качества измерений фазового фронта и получению навигационных уравнений для координат и времени, полагая при этом, что вычисление ориентации и координат ОНВ не вызовет особых проблем. Тем более, что на плоскости задача решалась быстро и просто.
Однако, когда я построил модель в трёхмерном пространстве, неожиданно выяснилось, что вычислить значения ориентации ОНВ при неизвестных его координатах в ГСК не получается. Несколько предпринятых попыток определить ориентацию с помощью матриц направляющих косинусов и поворотов привели к такому нагромождению тригонометрических функций, что продвигаться дальше к решению у меня не получалось. Какое-то время даже казалось, что аналитического решения вообще не существует.
Но оно, конечно, существует. Мне удалось найти решение этой задачи, используя свойства кватернионов. В этом материале я хочу описать саму задачу, ход и её решение, уделяя внимание ориентации и координатам ОНВ, и пока оставляя за рамками измерения координат по фазовому фронту.
Входные данные
Итак, входные данные:
 : вектор-столбец положения
: вектор-столбец положения  -го НС в ГСК,
-го НС в ГСК,  : номер НС,
: номер НС,  : вектор-столбец положения
: вектор-столбец положения  -го НС в координатах ЛСК; векторы
-го НС в координатах ЛСК; векторы  и
и  полагаем известными; ГСК, ЛСК: правые декартовы системы координат в 3-х мерном евклидовом пространстве
полагаем известными; ГСК, ЛСК: правые декартовы системы координат в 3-х мерном евклидовом пространстве  с разнонаправленными базисами
с разнонаправленными базисами  и
и  соответственно; начала координат ГСК и ЛСК не совпадают. Нижний индекс дальше будет обозначать номер вектора, верхний — номер элемента в векторе, если только не указано явно, что это степень.
соответственно; начала координат ГСК и ЛСК не совпадают. Нижний индекс дальше будет обозначать номер вектора, верхний — номер элемента в векторе, если только не указано явно, что это степень.
Задача
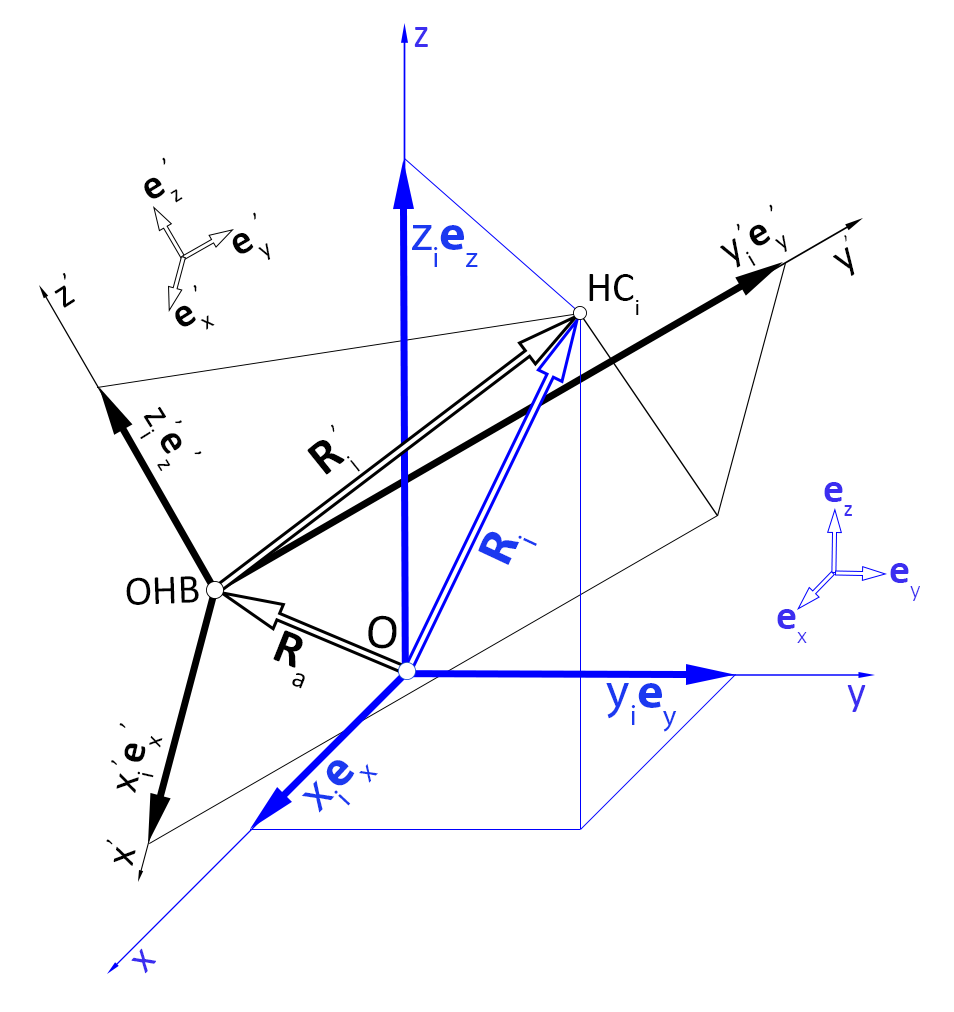 Рис. 2. Основные величины
Рис. 2. Основные величиныНужно найти:
 : вектор-столбец положения ОНВ в ГСК,
: вектор-столбец положения ОНВ в ГСК,
 : оператор перехода от ЛСК к ГСК, который я условно назвал «оператором ориентации» (рис. 2)
: оператор перехода от ЛСК к ГСК, который я условно назвал «оператором ориентации» (рис. 2)
Решение
Теперь ход моих рассуждений и решения.
Разложение векторов  и
и  в своих базисах:
в своих базисах:  , где
, где  — номер НС. Базисные векторы ЛСК
— номер НС. Базисные векторы ЛСК

где  ,
,  — множество вещественных чисел,
— множество вещественных чисел,  . Выписывая эти коэффициенты в матрицу
. Выписывая эти коэффициенты в матрицу

получаем

полагая, что  ,
,  ,
,  . Следовательно, координаты вектора
. Следовательно, координаты вектора  в базисе ГСК
в базисе ГСК  . Можно сказать, что
. Можно сказать, что  является матрицей некоторого линейного оператора (или «оператора ориентации»), такого, что
является матрицей некоторого линейного оператора (или «оператора ориентации»), такого, что  , определённого в базисе ГСК. Такой матрицей может быть матрица направляющих косинусов или любая из матриц поворотов.
, определённого в базисе ГСК. Такой матрицей может быть матрица направляющих косинусов или любая из матриц поворотов.
Свойства произвольного евклидового пространства позволяют записать уравнение для вычисления вектора положения ОНВ:
 (1)
(1)
Неудачный поиск решения
Уравнение (1) содержит две неизвестные матричные величины  и
и  , и имеет поэтому бесконечное число решений. Аналогичное соотношение для трёх различных НС в виде
, и имеет поэтому бесконечное число решений. Аналогичное соотношение для трёх различных НС в виде

где

квадратные невырожденные матрицы, также содержат две неизвестные матричные величины  и
и  . Можно переписать (1) и (2) так, чтобы избавиться от величины
. Можно переписать (1) и (2) так, чтобы избавиться от величины  :
:

откуда

или

где  .
.
Если бы я смог как-нибудь найти  из (3) и подставить в (1), то задача была бы решена. К примеру, была сделана попытка расписать (3) по трём НС аналогично с (2), но в итоге матрицы получались вырожденные и уравнение единственного решения поэтому не имело. Попытки расписать и решить систему уравнение вроде
из (3) и подставить в (1), то задача была бы решена. К примеру, была сделана попытка расписать (3) по трём НС аналогично с (2), но в итоге матрицы получались вырожденные и уравнение единственного решения поэтому не имело. Попытки расписать и решить систему уравнение вроде

приводили к тому самому нагромождению синусов и косинусов, о котором я упомянул во вступлении.
Здесь я и подумал, а получится ли найти  , если (3) или (4) записать в кватернионном виде. В итоге получилось, но продолжу по порядку.
, если (3) или (4) записать в кватернионном виде. В итоге получилось, но продолжу по порядку.
Теория о кватернионе поворота
Два теоретических момента, которые, думаю, стоит упомянуть.
Кватернионом, как мы знаем, является математический объект вида  , где
, где  ,
,  ,
,  ,
, 
 ,
,  — скалярная часть (множитель вещественной единицы),
— скалярная часть (множитель вещественной единицы),  — векторная часть; 1, i, j, k — вещественная и три разные мнимые единицы с таблицей умножения:
— векторная часть; 1, i, j, k — вещественная и три разные мнимые единицы с таблицей умножения:

Кватернион даёт удобную возможность представления трёхмерных преобразований (вращений), определяя одновременно и ось поворота, и угол вращения. Если взять некоторый кватернион  , такой, что
, такой, что  , то можно записать, что
, то можно записать, что  , и значит
, и значит  , где
, где  ,
,  . Здесь индекс в скобках обозначает номер элемента, а верхний индекс без скобки — возведение в степень. Если вектор
. Здесь индекс в скобках обозначает номер элемента, а верхний индекс без скобки — возведение в степень. Если вектор  представить как
представить как

где  ,
,  ,
,  , то кватернион
, то кватернион  запишется так:
запишется так:

где  . Если теперь взять произвольный кватернион
. Если теперь взять произвольный кватернион  с нулевой скалярной частью и вектором
с нулевой скалярной частью и вектором  , то результатом операции
, то результатом операции

будет вектор  с той же длиной, что и
с той же длиной, что и  , но повёрнутый на угол
, но повёрнутый на угол  против часовой стрелки вокруг оси, направляющим вектором которой является
против часовой стрелки вокруг оси, направляющим вектором которой является  . Дальше будут встречаться фразы вроде «кватернион
. Дальше будут встречаться фразы вроде «кватернион  выполняет поворот вектора
выполняет поворот вектора  », которые, конечно, подразумевают применение кватерниона
», которые, конечно, подразумевают применение кватерниона  к вектору
к вектору  и получение
и получение  в соответствии с (5).
в соответствии с (5).
Последний теоретический момент. Для обозначения разных видов умножения используются такие общеизвестные значки:  или
или  : скалярное произведение,
: скалярное произведение,  : кватернионное произведение,
: кватернионное произведение,  : векторное произведение.
: векторное произведение.
На этом с теорией всё.
Описание решения с кватернионами
Вернёмся к векторам  и
и  . Три замечания об их характере, которые потребуются дальше. Примем пока k = 1, i = 2.
. Три замечания об их характере, которые потребуются дальше. Примем пока k = 1, i = 2.
Нужные замечания
Во-первых, эти векторы являются свободными векторами, которые можно перемещать в пространстве, соблюдая параллельность перемещений.
Во-вторых, они неколлинеарны. Действительно, если бы они были коллинеарными, то (3) обращалось бы в истинное высказывание только при единичной матрице  и задачу решать не нужно было.
и задачу решать не нужно было.
И, в-третьих,  . В самом деле, так как
. В самом деле, так как  — это ортогональная матрица, которая не меняет длину вектора
— это ортогональная матрица, которая не меняет длину вектора  , то из (3) следует, что длины векторов
, то из (3) следует, что длины векторов  и
и  равны.
равны.
Tак как в (3) длины векторов не имеют значения, для упрощения записей и решения дальше заменю векторы  и
и  их нормированными эквивалентами:
их нормированными эквивалентами:

и в виде кватернионов:

Кватернионная форма основных уравнений
Выражение (3) в кватернионной форме выглядит теперь так:

где  — неизвестный кватернион, эквивалент
— неизвестный кватернион, эквивалент  , а выражение (1) так:
, а выражение (1) так:

где  ,
,  .
.
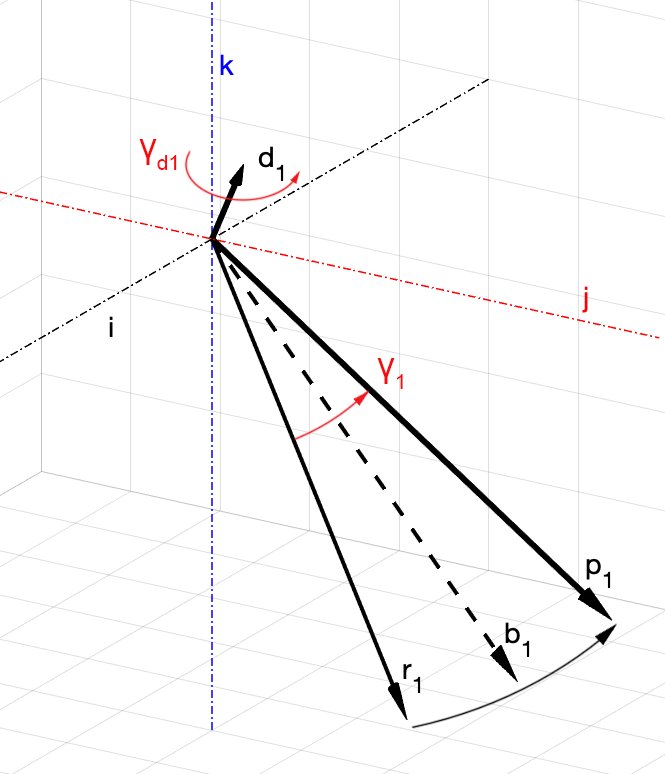 Рис. 3. Основные векторы
Рис. 3. Основные векторыТак как векторы  и
и  свободны, неколлинеарны, то можно совместить их концы таким образом, чтобы
свободны, неколлинеарны, то можно совместить их концы таким образом, чтобы  и
и  образовали угол
образовали угол  на плоскости, натянутой на эти векторы (пусть эта плоскость будет
на плоскости, натянутой на эти векторы (пусть эта плоскость будет  ). Начало координат поместим в точку, общую для
). Начало координат поместим в точку, общую для  и
и  (рис. 3), и будем полагать, что значение
(рис. 3), и будем полагать, что значение  известно.
известно.
Уравнение (6), аналогично уравнению (3), по-прежнему имеет бесконечное множество решений: можно найти сколько угодно различных  , которые удовлетворяют (6). Геометрически это обозначает, что можно найти бесконечное число различных прямых, вокруг которых можно выполнить вращение, совмещающее
, которые удовлетворяют (6). Геометрически это обозначает, что можно найти бесконечное число различных прямых, вокруг которых можно выполнить вращение, совмещающее  с
с  . На рис. 3 приведён пример, в котором поворот выполняется по кратчайшему пути вокруг прямой с направляющим вектором
. На рис. 3 приведён пример, в котором поворот выполняется по кратчайшему пути вокруг прямой с направляющим вектором  , ортогональным плоскости
, ортогональным плоскости  . Очевидно, что
. Очевидно, что  .
.
На рис. 4, а) и б) приведён пример, в котором вокруг некоторой оси с направляющим вектором  построен круговой конус
построен круговой конус  с направляющими прямыми
с направляющими прямыми  и
и  . Ясно, что вокруг такой оси можно сделать поворот, совмещающий
. Ясно, что вокруг такой оси можно сделать поворот, совмещающий  с
с  , который будет выполнен не по кратчайшему пути (не в плоскости
, который будет выполнен не по кратчайшему пути (не в плоскости  ), и угол
), и угол  , измеряемый в плоскости основания конуса
, измеряемый в плоскости основания конуса  , не будет равен
, не будет равен  , измеряемый в плоскости
, измеряемый в плоскости  .
.
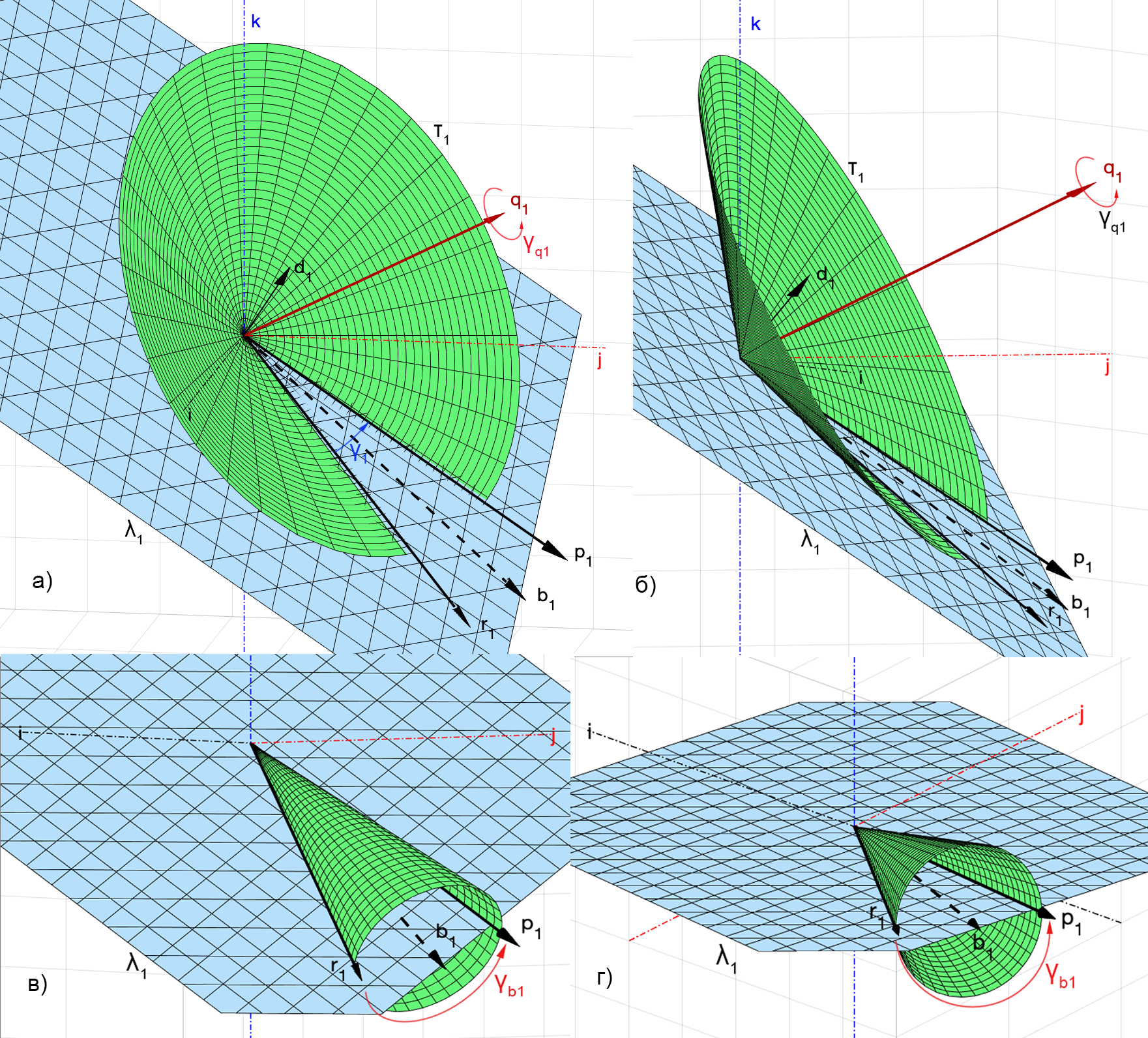 Рис. 4. Поворот r к p вокруг произвольной оси
Рис. 4. Поворот r к p вокруг произвольной осиЧтобы найти неизвестное значение  , я добавил два новых объекта
, я добавил два новых объекта  и
и  , получаемые из векторов
, получаемые из векторов  и
и  . Выражение (6), аналогично (4), расширяется до системы уравнений
. Выражение (6), аналогично (4), расширяется до системы уравнений

Теперь можно утверждать, что кватернион  , найденный из этой системы уравнений (8), является единственным решением, и он выполняет такой поворот в пространстве, который совмещает тройку векторов базиса ЛСК с векторами ГСК. Следовательно, его можно подставить в выражение (7) и вычислить искомое
, найденный из этой системы уравнений (8), является единственным решением, и он выполняет такой поворот в пространстве, который совмещает тройку векторов базиса ЛСК с векторами ГСК. Следовательно, его можно подставить в выражение (7) и вычислить искомое  — положение ОНВ.
— положение ОНВ.
Когда я записал (8), отчего-то стало ясно, что здесь безразмерная куча тригонометрии может не возникнуть, и аналитическое решение поэтому можно будет найти более-менее просто.
Геометрия задачи
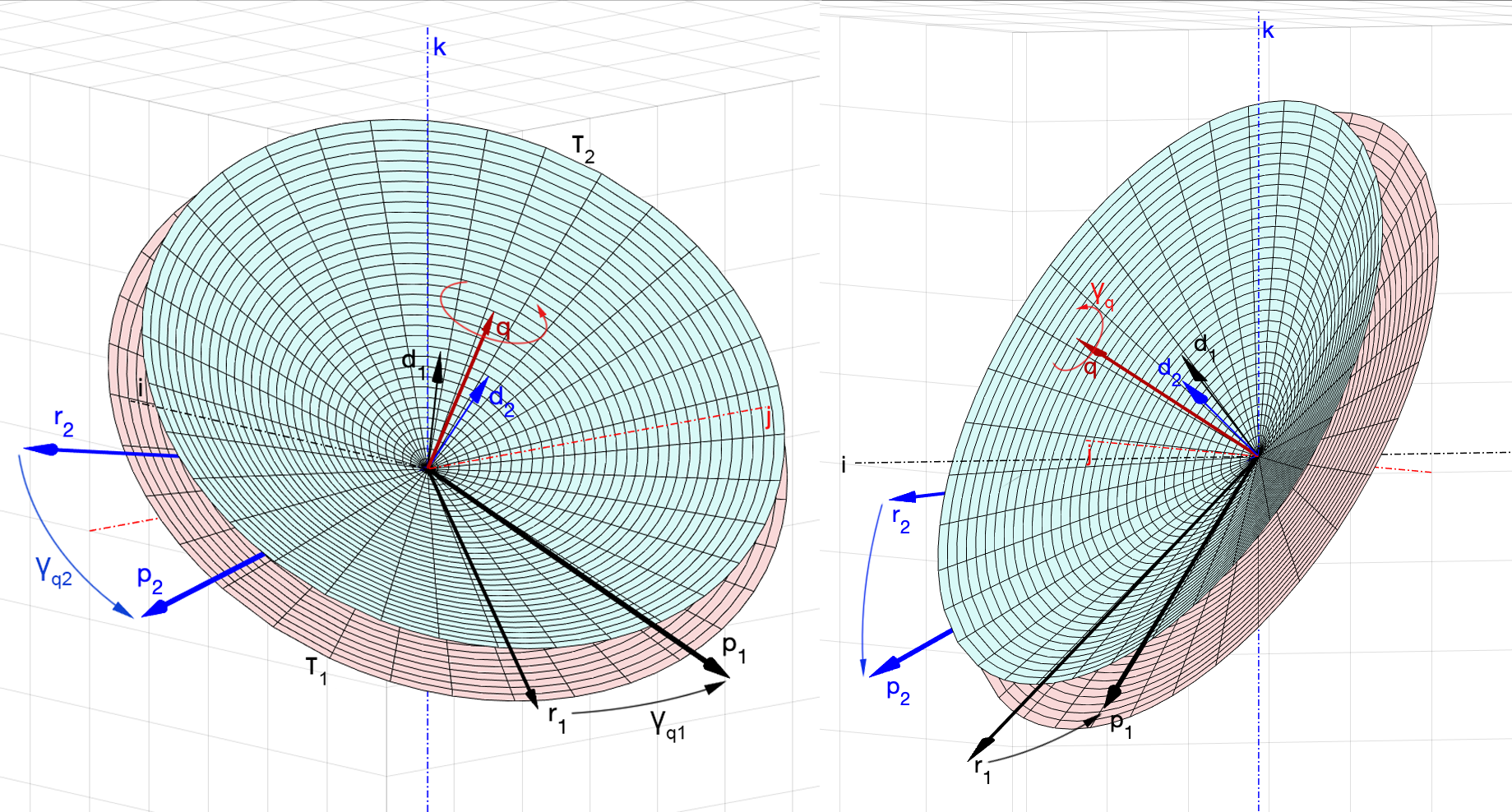 Рис. 5. Геометрия задачи
Рис. 5. Геометрия задачиГеометрически задача теперь выглядит так. Нужно найти в пространстве такую ось, вокруг которой можно выполнить поворот, совмещающий вектор  с вектором
с вектором  , и вектор
, и вектор  с вектором
с вектором  . Прямые, направляющими векторами которых являются
. Прямые, направляющими векторами которых являются  (или
(или  ) и
) и  (или
(или  ), образуют два различных круговых конуса
), образуют два различных круговых конуса  ,
,  . Эти конусы имеют общую ось, направляющим вектором которой является искомый
. Эти конусы имеют общую ось, направляющим вектором которой является искомый  . При этом повороты
. При этом повороты  к
к  , i = 1, 2, будут выполняться не по кратчайшему пути, и поэтому углы
, i = 1, 2, будут выполняться не по кратчайшему пути, и поэтому углы  , измеренные в плоскости оснований конусов
, измеренные в плоскости оснований конусов  , будут отличаться от углов
, будут отличаться от углов  (рис. 5).
(рис. 5).
Здесь и далее нам понадобятся два таких утверждения.
Утверждение 1. Угол поворота вокруг биссектрисы  такого, который совмещает
такого, который совмещает  с
с  , равен
, равен  (рис. 4, в), г)).
(рис. 4, в), г)).
Утверждение 2. Поворот, который совмещает  с
с  , i = 1, 2, вокруг некоторой прямой можно сделать тогда и только тогда, когда эта прямая лежит в плоскости, натянутой на
, i = 1, 2, вокруг некоторой прямой можно сделать тогда и только тогда, когда эта прямая лежит в плоскости, натянутой на  и
и  (плоскость
(плоскость  ), рис. 6). Вокруг любой другой прямой такой поворот выполнить нельзя.
), рис. 6). Вокруг любой другой прямой такой поворот выполнить нельзя.
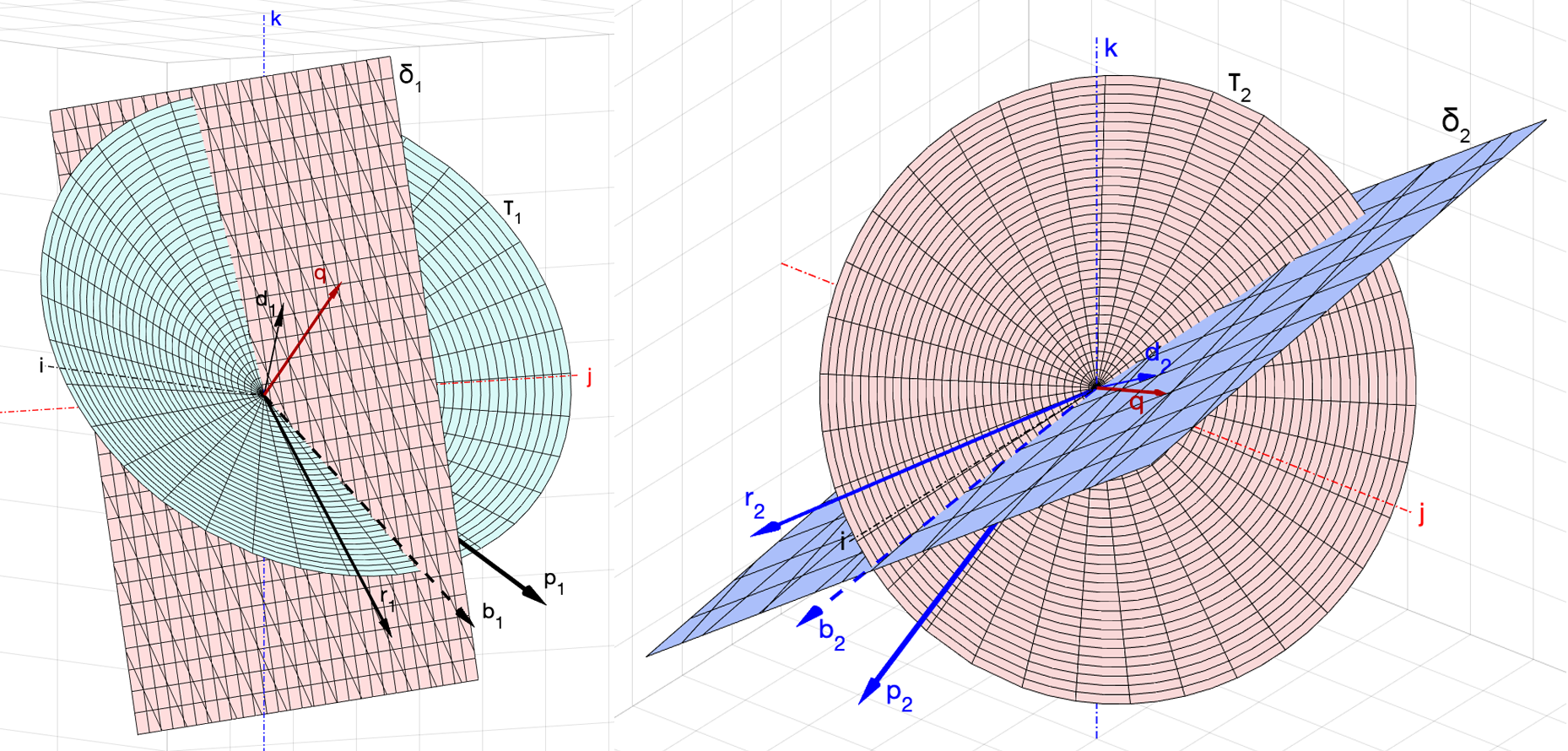 Рис. 6. Плоскости векторов b и d
Рис. 6. Плоскости векторов b и dДля доказательства этих утверждений нужно рассмотреть свойства кругового конуса  , образованного линией, направляющий вектор которой равен
, образованного линией, направляющий вектор которой равен  (или
(или  ), а ось лежит в плоскости
), а ось лежит в плоскости  .
.
Очевидно, что ось, вокруг которой можно сделать такой поворот, который совместит  с
с  , i = 1, 2, будет одновременно принадлежать обеим плоскостям
, i = 1, 2, будет одновременно принадлежать обеим плоскостям  , то есть будет совпадать с линией их пересечения. Поэтому вектор
, то есть будет совпадать с линией их пересечения. Поэтому вектор  будем искать из уравнения линии пересечения плоскостей
будем искать из уравнения линии пересечения плоскостей  (рис. 7).
(рис. 7).
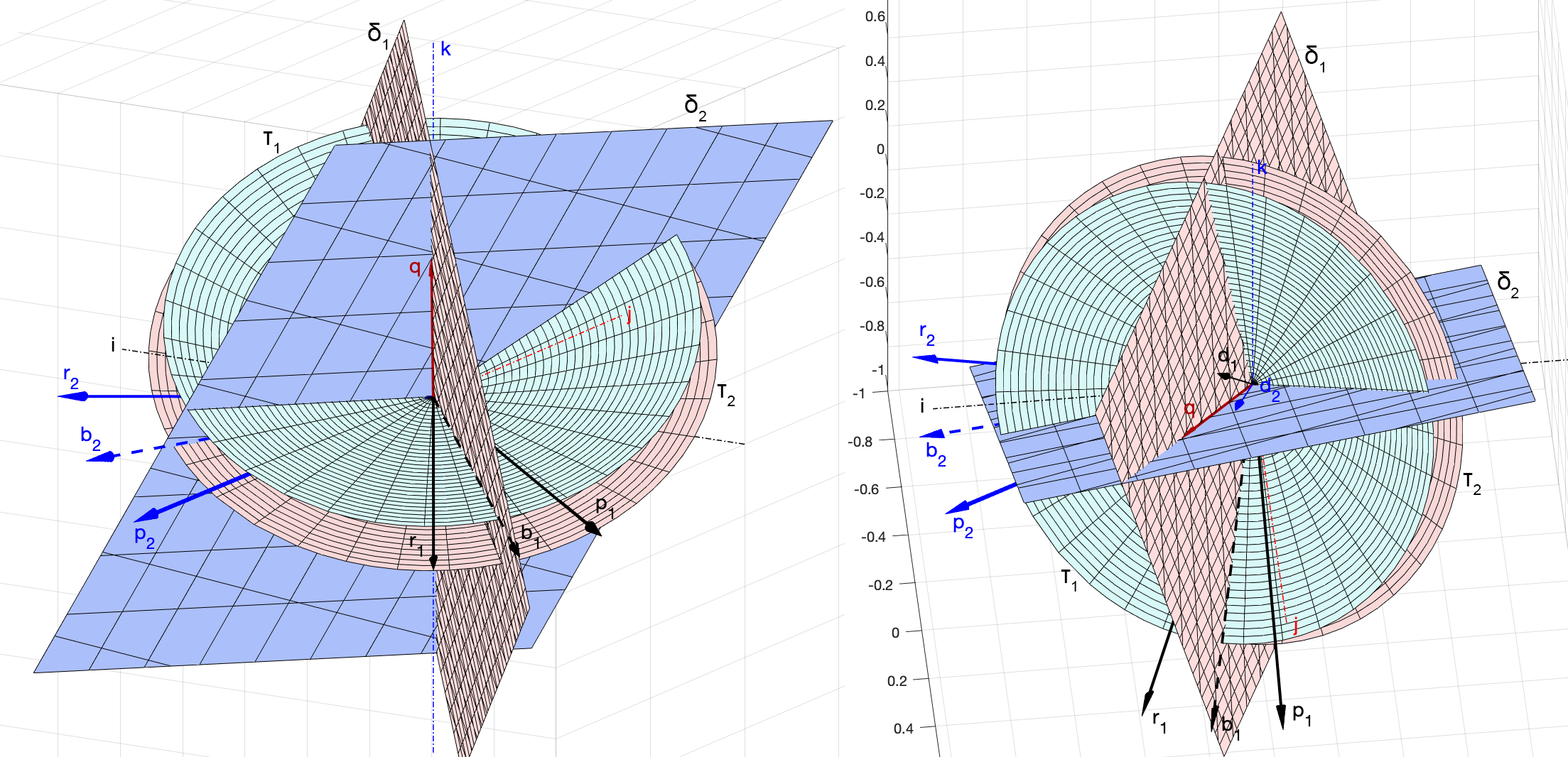 Рис. 7. Линия пересечения плоскостей
Рис. 7. Линия пересечения плоскостейЭта прямая не будет совпадать с прямыми, определяемые направляющими векторами  . Проходя через начало координат, она образует некоторый угол
. Проходя через начало координат, она образует некоторый угол  с вектором
с вектором  , и угол
, и угол  с вектором
с вектором  (рис. 8). Оба этих угла нам пока неизвестны и
(рис. 8). Оба этих угла нам пока неизвестны и  .
.
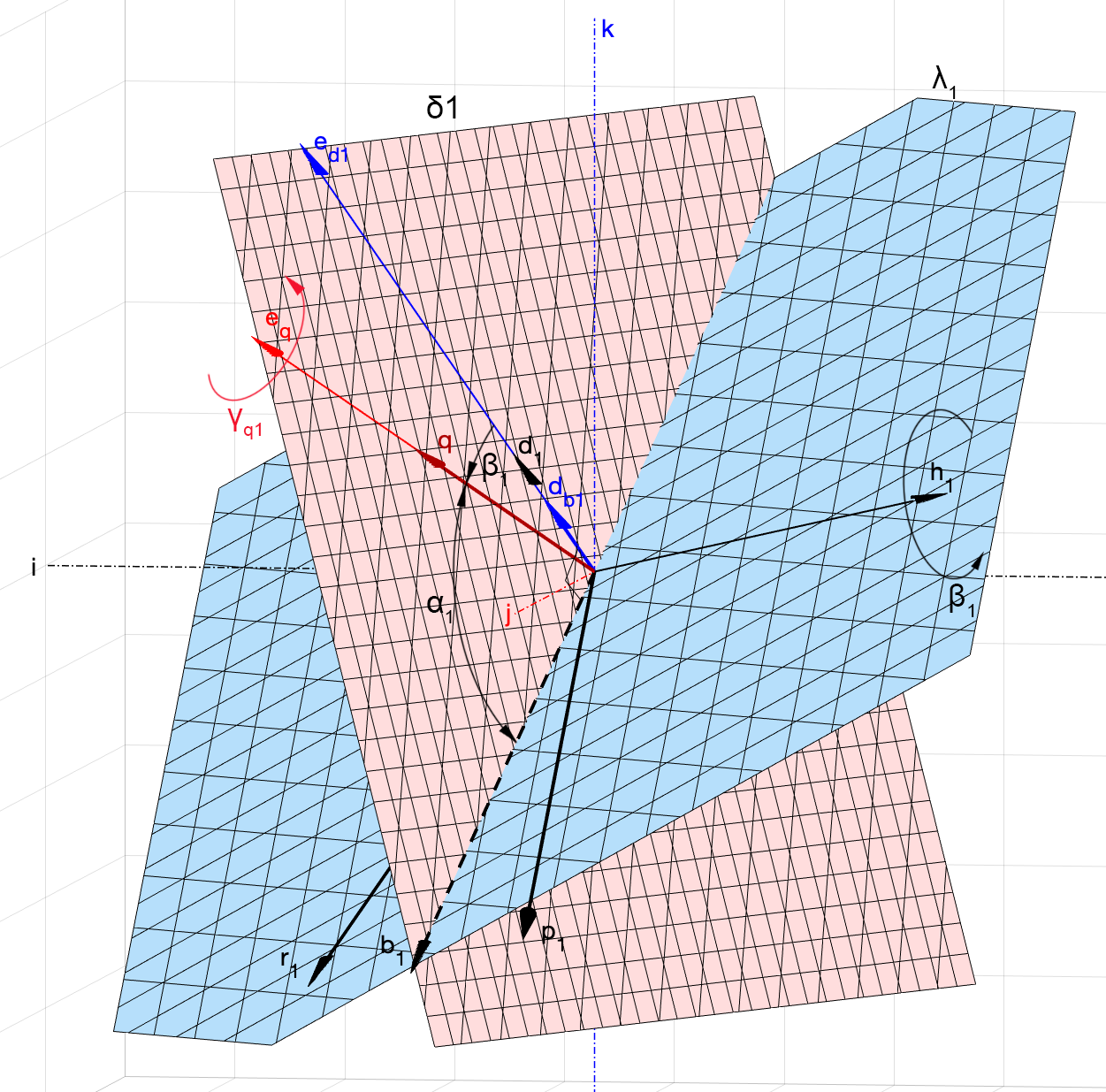 Рис. 8. Все векторы
Рис. 8. Все векторыПосмотрим на рис. 8. Если взять некоторый кватернион  , который поворачивает вектор
, который поворачивает вектор  на
на  в плоскости
в плоскости  , т.е.
, т.е.

и повернуть его вокруг начала координат на угол  в плоскости
в плоскости  , то из
, то из

мы получим вектор  , который в свою очередь является кватернионом поворота на угол
, который в свою очередь является кватернионом поворота на угол  для вектора
для вектора  , причём
, причём  при этом будет описывать дугу в пространстве. Поворот
при этом будет описывать дугу в пространстве. Поворот  к
к  может быть выполнен кватернионом
может быть выполнен кватернионом  , который мы найдём чуть позже из условия его ортогональности к плоскости
, который мы найдём чуть позже из условия его ортогональности к плоскости  .
.
Из утверждения 2 следует, что вектор  может быть совмещён с
может быть совмещён с  вращением вокруг оси с направляющим вектором
вращением вокруг оси с направляющим вектором  на некоторый угол
на некоторый угол  , который, очевидно, функционально зависит от
, который, очевидно, функционально зависит от  . Поэтому, зная
. Поэтому, зная  и зависимость
и зависимость  , мы сможем построить из кватерниона
, мы сможем построить из кватерниона  кватернион
кватернион  , являющийся решением задачи.
, являющийся решением задачи.
Зависимость  мы найдём немного позже из простых тригонометрических соотношений.
мы найдём немного позже из простых тригонометрических соотношений.
Угол  будем искать из следующих соображений. Так как
будем искать из следующих соображений. Так как  ортогонален одновременно
ортогонален одновременно  и
и  , то результат векторного произведения
, то результат векторного произведения  будет сонаправлен с
будет сонаправлен с  . Обозначим
. Обозначим

и запишем такое скалярное произведение:  . Отметим, что направление
. Отметим, что направление  не зависит ни от
не зависит ни от  , ни от
, ни от  . Поэтому для вычисления
. Поэтому для вычисления  примем
примем  и
и  , то есть угол, при котором
, то есть угол, при котором  . Следовательно, в записанном выше скалярном произведении остаётся одна переменная
. Следовательно, в записанном выше скалярном произведении остаётся одна переменная  , которую можно вычислить, решив уравнение
, которую можно вычислить, решив уравнение

полагая, что  . Теперь, зная
. Теперь, зная  , зависимость
, зависимость  и вектор
и вектор  , искомый кватернион
, искомый кватернион  будет выглядеть так:
будет выглядеть так:

Осталось найти каждый из описанных выше элементов, чтобы решить задачу. Заметим, что объекты  ,
,  ,
,  ,
,  ,
,  ,
,  определяются аналогично. Поэтому далее нижний индекс »1» или »2» буду заменять на » i », подразумевая, что i = 1, 2 .
определяются аналогично. Поэтому далее нижний индекс »1» или »2» буду заменять на » i », подразумевая, что i = 1, 2 .
Кватернионы, которые будем искать
Ещё раз перечислим кватернионы и векторы, которые мы сейчас будем строить для получения решения:
кватернион
 : совмещает вектор
: совмещает вектор  с
с  по кратчайшей траектории,
по кратчайшей траектории, кватернион
 : направляющий вектор биссектрисы угла между векторами
: направляющий вектор биссектрисы угла между векторами  и
и  ; векторы
; векторы  и
и  определяют плоскость
определяют плоскость  , в которой лежит искомый кватернион
, в которой лежит искомый кватернион  ,
, кватернион
 : сонаправлен с
: сонаправлен с  ; модуль векторной части
; модуль векторной части  равен 1,
равен 1, кватернион
 : поворачивает вектор
: поворачивает вектор  в плоскости
в плоскости  на угол
на угол  ; значение
; значение  неизвестно,
неизвестно, зависимость
 : вычисляет
: вычисляет  для построения искомого кватерниона
для построения искомого кватерниона  из
из  ,
, кватернион
 : получен поворотом вектора
: получен поворотом вектора  в плоскости
в плоскости  на угол
на угол  ; из
; из  будет получено решение,
будет получено решение, кватернион
 : нужен для вычисления угла
: нужен для вычисления угла  ,
, и, наконец, результирующий кватернион
 : получается из
: получается из  , учитывая найденные
, учитывая найденные  и
и  .
.
Кватернион 
Найдём кватернион  , который совмещает
, который совмещает  с
с  по кратчайшей траектории. Вектор
по кратчайшей траектории. Вектор  перемещае
перемещае
