Квадрокоптер на MultiWii SE v2.5 — от задумки до первого полёта
Некоторое время назад, натыкаясь на просторах интернета на статьи и видео о коптерах, думал, что это сложно и доступно не каждому. Но желание стать коптероводом было велико и после изучения массы материала на эту тему сделал для себя вывод, что необходимо для постройки квадрокоптера, именно постройки с нуля и самому, покупать готовый вариант не хотел. Теперь хочу поделиться с Вами своим опытом постройки квадрокоптера на MultiWii SE v2.5. В статье постараюсь подробно описать весь процесс постройки квадрокоптера с нуля до первого полёта абсолютному новичку в этой теме, каким был сам некоторое время назад.
Немного теории о полётах на квадрокоптере
Коптер мы будем собирать на классической раме формы «X». Управлять коптером не так просто, как может показаться с первого взгляда, у него нет переда и зада как в радиоуправляемых автомобилях. При команде «вперед» квадрокоптер летит не туда, куда смотрит пилот, а туда, куда направлен нос квадрокоптера (на полётном контроллере есть соответствующая стрелка), это для новичков таит в себе большую опасность, т.к. с земли бывает трудно определить где нос у коптера, так что при постройке его нужно как-то пометить, например лучами другого цвета или размещением светодиодов. Управлять коптером, т.е. определять и задавать его ориентацию в пространстве мы будем углами тангажа, крена и рыскания + набор высоты. Полёт коптера в необходимом направлении достигается изменением этих трех углов. Например, чтобы полететь вперед, коптер должен наклониться носом к земле (тангаж).
Throttle — газ, набор высоты
Aileron — руль крена, элерон (roll)
Elevator — руль высоты, тангаж (pitch)
Rudder — руль направления, рыскание (yaw)
Моторы:
LFW — левый передний, вращение по часовой стрелке
RFC — правый передний, вращение против часовой стрелки
LBC — левый задний, вращение против часовой стрелки
RBW — правый задний, вращение по часовой стрелке

Необходимые комплектующие:
Полётный контроллер CRIUS MultiWii SE v2.5
Программатор FTDI
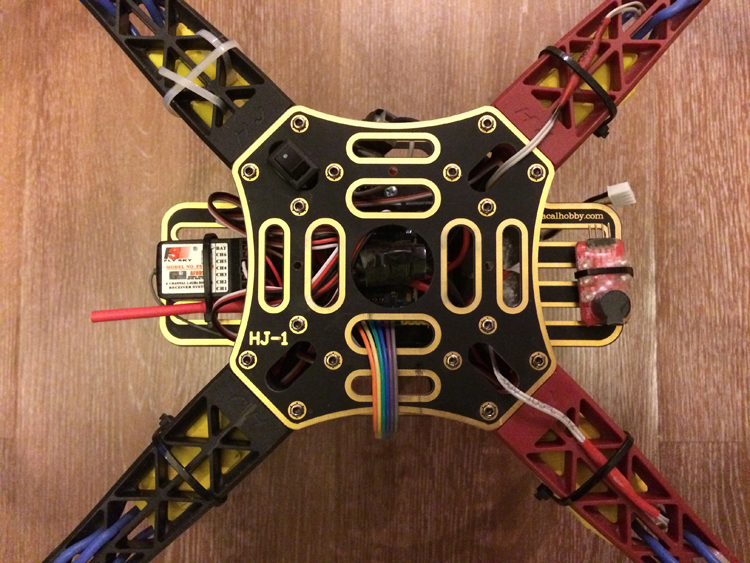
Рама HJ450
Моторы 2212–1000KV — 4шт.
Регуляторы скорости ESC 30A — 4шт.
Аккум 11.1V 2200Mah 3S 40C Li-Po (пример)
Зарядка для аккума B3 AC 2S-3S 7.4V 11.1V Li-Po Battery Balancer
Провод для аккума T-Plug
Пластиковые хомуты
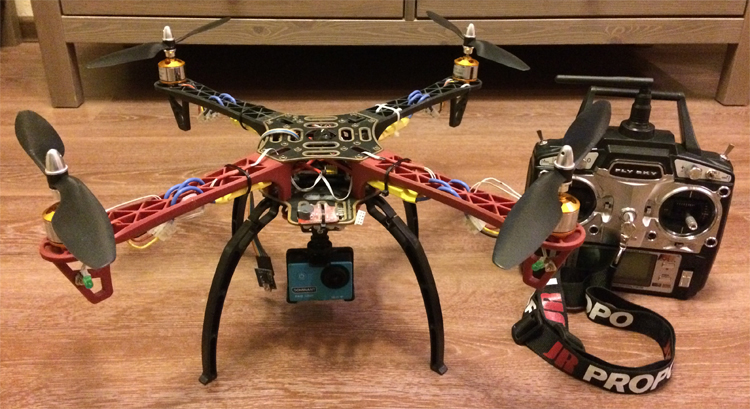
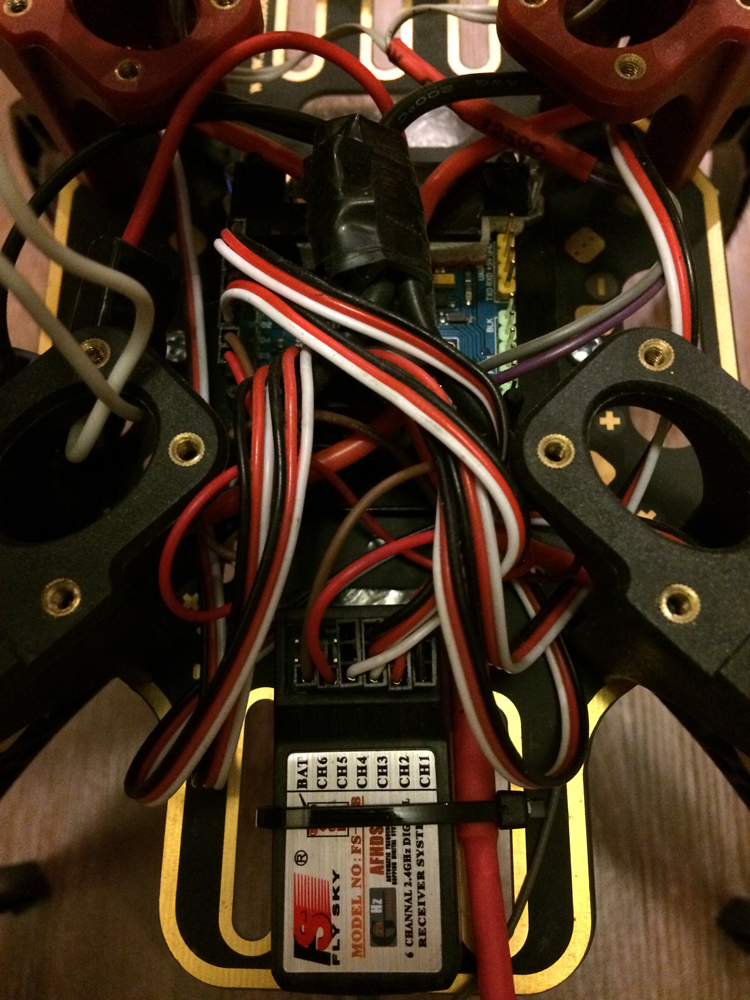
Аппаратура управления FlySky FS-T6 2.4G 6CH в комплекте с приёмником
Пропеллеры 1045 (10×4.5) CW/CCW — 2шт. вращение по часовой стрелке + 2шт. вращение против часовой стрелки; пропеллеров берите побольше, т.к. пока научитесь управлять коптером, при падениях они будут ломаться на раз
Опционально:
Ножки для посадки
Тестер для аккума Li-Po Battery Voltage Indicator Tester Low Voltage (будет сигнализировать при разряде аккума)
Схема сборки:

Перед сборкой необходимо откалибровать регуляторы ESC, процесс следующий: подключаем мотор к регулю, регуль подключаем к каналу газа на приёмнике (CH3) и к аккуму, поднимаем стик газа на аппаратуре управления вверх до упора, включаем аппу — издаётся характерный звук, опускаем стик газа вниз до упора — издаётся характерный звук, далее тестируем — поднимаем/опускаем стик газа — проверяем работу, выключаем аппу — регулятор откалиброван; по такой аналогии калибруем все ESC (подходящее видео для наглядности).
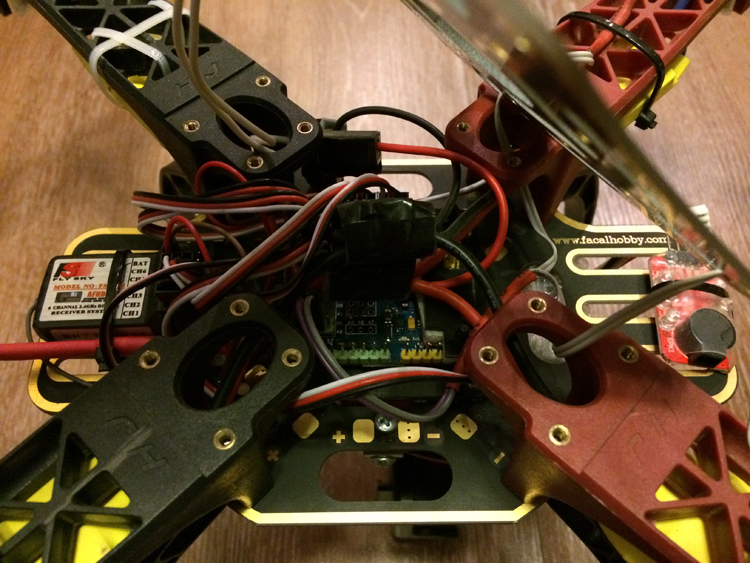
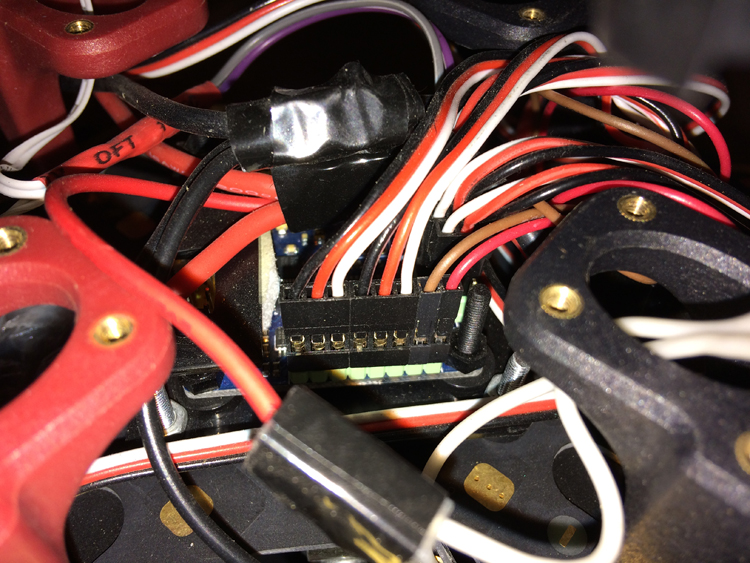
Собираем раму, устанавливаем MultiWii, крепим моторы, подключаем регуляторы ESC: к моторам, к MultiWii и к аккуму («плюсы» и «минусы» от регулей соединяем между собой и подключаем соответственно к »+» и »-» аккума). Внимание, для изменения направления вращения мотора, необходимо просто поменять местами два любых провода из трёх идущих от мотора к ESC. Устанавливать MultiWii на раму желательно через площадку (я делал сам, но можно и купить) во избежании замыканий на корпус и для точности данных; так же я сделал небольшой «колхоз» для барометра — закрыл его поролоном для уменьшения погрешности в данных.
| Моторы | MultiWii | Приёмник | MultiWii |
| П.Л. | D3 | CH1 | D4 |
| П.П. | D10 | CH2 | D5 |
| З.Л. | D11 | Ch3 | D2 |
| З.П. | D9 | CH4 | D6 |
| CH5 (доп. канал) | D8 | ||
| CH6 (доп. канал) | D7 |
Дополнительные каналы CH5 и CH6 можно использовать для включения функций: удержание высоты, возврат домой, управление подвесом камеры и т.п., более подробно можно почитать в этой статье. Диоды у меня подключены к »+» и »-» на A2. Программатор FTDI подключается в соответствующий разъём FTDI на плате.






После того, как мы всё собрали и подключили, необходимо залить прошивку в MultiWii, делать это нужно через программу Arduino IDE (скачать текущую версию можно здесь). Подключаем MultiWii к PC через программатор FTDI, запускаем Arduino IDE, в меню выбираем COM порт, к которому подключена плата, так же в меню выбираем тип платы, открываем прошивку (ссылка в конце статьи), открывать нужно файл MultiWii.ino, сверху вы увидите несколько вкладок, нас будет интересовать только config.h, в ней и нужно настраивать прошивку — в зависимости от необходимых настроек нужно раскомментировать (удалить »//») одну из строк в нужном разделе (ссылка на файл config.h с моими настройками в конце статьи), после настройки заливаем прошивку в MultiWii.
Теперь нужно продолжить настройку коптера через GUI, для этого будем использовать программу MultiWiiConf (ссылка в конце статьи). Подключаем MultiWii к PC через программатор FTDI, запускаем MultiWiiConf, в меню выбираем COM порт, к которому подключена плата, нажимаем кнопку START (на графике должны появится значения), перед редактированием параметров — нажимаем READ, для сохранения параметров — нажимаем WRITE. После того как Вы выбрали порт и нажали START (увидели, что график ожил, данные поступают), необходимо откалибровать датчики: для калибровки акселерометра — выставите коптер параллельно горизонту и нажмите кнопку CALIB_ACC, GUI ненадолго подвиснет, после этого убедитесь что оси ROLL и PITCH параллельны; для калибровки магнитометра (компаса) — нажмите на кнопку CALIB_MAG и вращайте коптер по всем осям или поочередно ставьте коптер на ребра в течении 30 сек. Так же после успешного соединения программы конфигуратора с вашим коптером, справа сверху Вы увидите голубые полоски, показывающие каналы вашего пульта, подвигайте стиками, чтобы убедится, что все работает верно. Стик в min положении должен показывать значение 1000, по центру 1500 и в max 2000; если это не так — отриммируйте пульт согласно инструкции к нему (ссылка в конце статьи). Помните, что полоски должны двигаться в соответствии с движениями стиков, т.е. если Вы поднимаете ручку газа вверх, то и полоска должна идти вверх (аналогично для других каналов), если это не так — сделайте реверс каналов вашего пульта. Так же в GUI можете выставить функции на доп. каналы, например удержание высоты (BARO). Функция выравнивание в горизонт (LEVEL) должна быть включена постоянно! Вот подходящее видео для наглядности работы программы MultiWiiConf.
Несколько отступлений по теме
Не ждите от функции удержание высоты (BARO) жёсткого висения в точке, т.к. для этого используется барометр — коптер конечно будет пытаться держать высоту, на которой Вы активировали функцию, но будет плавать в радиусе ± пару метров, как раз для точности данных с барометра и для его защиты от внешних воздействий я и делал «колхоз» с поролоном. Помните, удержание высоты нужно активировать на газу висения, т.е. тогда, когда Вы стиком газа добились того, что коптер ± держится на одной высоте и после активации функции не желательно трогать газ. Для более точного зависания в точке — лучше использовать дополнительный модуль GPS.
Функция удержания курса (MAG) очень капризная и её использование для меня закончилось плачевно, после активации и взлёта, коптер стал вращаться как волчок и стремительно от меня улетал, попытки определить нос коптера и вернуть его на курс не увенчались успехом, мне ничего другого не оставалось как бросить газ и бежать по направлению к падающей с неба точке. Вот небольшое видео и фото после падения. Может к такому поведению привёл не точно откалиброванный компас или магнитные помехи, или ещё что-то; в общем перед использованием почитайте инфу в интернете и будьте осторожны.
На будущее, может Вам пригодится, чтобы не таскать с собой на полёты ноут с программой MultiWiiConf — можно к контроллеру MultiWii подключить Bluetooth модуль HC-05 (подключается в разъём UART) и через приложения на Android (MultiWii Configuration и EZ-GUI Ground Station) по Bluetooth коннектится к коптеру, и производить необходимые настройки, аналогичные как в MultiWiiConf.
Процедура запуска моторов следующая: включаете питание на коптере (попищал), включаете аппу, стик газа из нижнего положения отводите вправо — моторы запустились (разармили) и вращаются на холостом ходу, теперь чтобы взлететь плавно прибавляйте газ; чтобы остановить моторы, стик газа из нижнего положения отводите влево — моторы остановились, выключаете питание на коптере, выключаете аппу.
На этом всё, надеюсь моя статья будет Вам полезна, а теперь можно устанавливать пропеллеры и вперёд, в нашем случае вверх, удачи Вам и меньше падений.
Небольшое видео моих полётов
Ссылки для скачивания:
Архив — прошивка MultiWii + программа MultiWiiConf
Файл config.h с моими настройками
Мануал по FlySky FS-T6
