Космонавт с МКС будет управлять вездеходом с манипуляторами на Земле

Европейский космонавт из дани Андреас Могенсен, доставленный в начале месяца на МКС ракетой «Союз», займётся сегодня на борту станции уникальным экспериментом «Interact». Он будет удалённо управлять роботом-вездеходом с обратной связью.
Вездеход будет кататься и орудовать манипуляторами в ангаре технического центра ESTEC (Европейский центр космических исследований и технологий). Это главный центр по разработке и тестированию технологий, находящийся в Нидерландах, и принадлежащий Европейскому космическому агентству ESA.
Тестирование вездехода будет проходить в три этапа. Сначала космонавт в течение получаса проверит связь с роботом. Затем он начнёт управлять его перемещениями и проверит работу манипуляторов, способных работать с субмиллиметровой точностью. На финальном этапе Могенсен попробует при помощи манипуляторов расставить специальные колышки в подготовленные отверстия небольшого верстака.
Эксперимент организован лабораторией удалённого управления роботами и хептики (Telerobotics & Haptics Lab), работающей в рамках ESTEC. Хептика — это разрабатывающаяся в настоящее время технология управления удалёнными роботами, оснащёнными датчиками обратной связи. Эти технологии позволяют хирургу удалённо оперировать пациента, ориентируясь на отдачу тканей, а, например, космонавту с орбитального корабля работать манипуляторами робота, находящегося на поверхности планеты.
Вездеход оснащён высокоточными манипуляторами немецкой фирмы KUKA. Их роборуки трудятся на различных производствах — собирают автомобили, складывают палеты с готовой продукцией, переносят стеклянные заготовки, работают на сталелитейных производствах в условиях высоких температур.
Манипуляторы вездехода оснащены множеством датчиков обратной связи — они способны «мягко» манипулировать различными хрупкими предметами, ограничивая нагрузку на них, и подстраиваться под движения рук оператора.
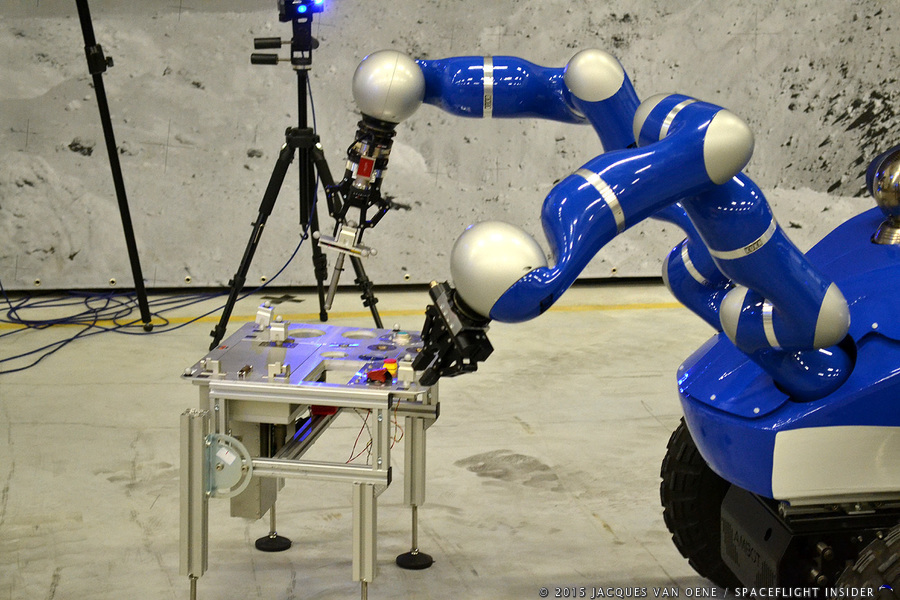
Кроме этого, у вездехода есть четыре камеры. Основная камера наверху позволяет ориентироваться в пространстве, камера на одном из манипуляторов обеспечивает точную работу с объектами, а передняя и задняя камеры увеличивают безопасность при передвижениях вездехода.
Тестируется не только удалённая работа с вездеходом — это можно было бы проделать из из соседнего помещения. Проверяется именно управление роботом с орбиты, с целью найти возможные непредвиденные сложности, связанные с этой операцией. Кроме того, в данном случае сигнал должен будет пройти сложный путь. Он отправится с МКС через систему спутников НАСА TDRSS (Система спутников для отслеживания и передачи данных), затем дойдёт до наземных станций в США, пересечёт Атлантику и дойдёт до Нидерландов. В общей сложности длина пути сигнала может составить 90000 км, в результате чего будут происходить задержки связи длительностью до 1 секунды.
Космический корабль «Союз ТМА-18М» был успешно запущен утром 2 сентября с помощью ракеты-носителя «Союз-ФГ» с космодрома «Байконур». На борту находились датчанин Андреас Могенсен, казахстанец Айдын Аимбетов и командир экипажа россиянин Сергей Волков. Корабль в течение двух дней сближался с Международной космической станцией, по пути успешно увильнул от обломков японской ракеты, и пристыковался к МКС 4 сентября.
