Хлопай ресницами и шагай: создание искусственных цилий, движимых магнитным полем
Для многих организмов движение это жизнь. Некоторые, конечно, могут оспорить это выражение, но большинство все же нуждается в перемещении для добычи пищи, поисков партнера, побега от недоброжелателя и т.д. Несмотря на свои миниатюрные габариты, многие микроорганизмы крайне активны. В зависимости от среды обитания и образа жизни их передвижения реализуются по-разному: кто-то машет жгутиком из стороны в сторону, кто-то им вращает по спирали, а у кого-то тело покрыто волоскообразными отростками, движущимися волной, как болельщики на стадионе. Именно о последних и пойдет речь сегодня. Ученые из Американского химического общества (Вашингтон, США) разработали искусственные реснички, имитирующие оные у микроорганизмов, которые можно привести в движение с помощью контролируемого магнитного поля. Из чего сделаны искусственные реснички, какие принципы лежат в основе их движения, и где можно применить столь необычную разработку? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
Реснички (или цилии от cilia) это не только то, чем можно хлопать, выражая полную ошарашенность вопросом на экзамене. На самом деле это лишь термин, обозначающий волоскообразную структуру малых размеров. Реснички являются весьма популярным инструментом для передвижения в микромире. Визуальной особенностью движения таких ресничек является их метахронность, т.е. последовательное движение одной реснички за другой. Подобный эффект можно наблюдать в движении конечностей многоножки или в движении сегментов тела червя. Пример наличия ресничек на теле микроогранизмов (в видео представлены инфузории Paramecium bursaria, P. caudatum и Oxytricia).
Для микромира метахронность ресничек обеспечивает движение в жидкостной среде, что крайне важно, например, для реализации некоторых процессов в теле человека. Вполне ожидаемо, что для ученых это является крайне привлекательным объектом исследований, так как его можно использовать и в создании робототехники, и в микробиологии. Попытки создания искусственных цилий уже были, но не без проблем. В большинстве случаев реснички либо двигались синхронно (что не является самым эффективным), либо для их создания требовались сложные установки и дорогостоящие материалы.
В рассматриваемом нами сегодня труде ученые предлагают новый и крайне простой метод создания метахронных микроскопических магнитных искусственных ресничек (μMAC от microscopic magnetic artificial cilia). Движение μMAC обеспечивается контролируемым распределением парамагнитных частиц в массиве ресничек с последующим применением магнитного поля.
Поскольку парамагнитные частицы имеют тенденцию выравниваться (объединяться) под воздействием магнитного поля, соседствующие реснички будут принимать различные распределения парамагнитных частиц. Ввиду этого они будут иметь разные магнитные свойства. Следовательно, геометрически идентичные μMAC будут демонстрировать неодинаковое поведение при изгибе в статическом однородном магнитном поле и совершать метахронное движение.
Созданные структуры из массивов ресничек обладают рядом преимуществ: простота изготовления, легкость активации (нужно лишь магнитное поле), эффективная перекачка жидкостей, возможность создания мягких роботов. К слову, мягкие роботы с μMAC, по словам ученых, способны переносить массу в 10 раз больше собственной и заползать на поверхности под углом от 0° до 180°.
Результаты исследования
Для создания μMAC (1A) были использованы полидиметилсилоксан (PDMS от polydimethylsiloxane) и парамагнитный порошок карбонильного железа (CIP от carbonyl iron powder).

Изображение №1
Учитывая, что парамагнитные частицы имеют тенденцию образовывать цепочки, которые выровнены с направлением приложенного магнитного поля, в форму был помещен массив стержневых магнитов. Эти магниты расположены так, чтобы иметь чередующуюся дипольную ориентацию между последовательными магнитами (1A (v)). За счет этого в структуре генерируется неоднородное, но периодическое магнитное поле (1B), из-за чего цепочки парамагнитных частиц имеют разную ориентацию в соседствующих ресничках (1A (vi)).
Процесс выравнивания парамагнитных частиц, когда к пресс-форме приближается стержнеобразный магнитный массив.Изготовленные μMAC размещались в виде прямоугольной решетки (1C), а каждая ресничка была цилиндрической формы с диаметром 50 мкм и высотой 350 мкм (1D). В основе решетки была немагнитная подложка из PDMS. Поскольку стержневые магниты имеют диаметр 4 мм, период генерируемого магнитного поля также составляет 4 мм (1B). Длина массива μMAC была выбрана примерно равной периоду магнитного поля (4 мм), ширина при этом должна была быть таковой, чтобы включать 10 ресничек. Следовательно, было создано несколько массивов с разным шагом и разным числом ресничек: 350 мкм — 12×10 = 120 ресничек; 450 мкм — 9×10 = 90 ресничек; 550 мкм — 8×10 = 80 ресничек.
Красные стрелки на 1B показывают плотность магнитного потока (B), приложенного к центральной части массива μMAC, которая составляет примерно 700 мкм (половина высоты ресничек (~175 мкм) плюс толщина кремниевой пластины (~525 мкм) над поверхностью магнитной решетки.
На 1E показано ожидаемое выравнивание парамагнитных частиц в одном ряду массива μMAC с шагом 350 мкм, полученное в ходе моделирования. А на 1F показаны уже экспериментальные данные по массиву μMAC, изготовленного из композита PDMS/CIP с массовым соотношением 2:1.
Изображение №2
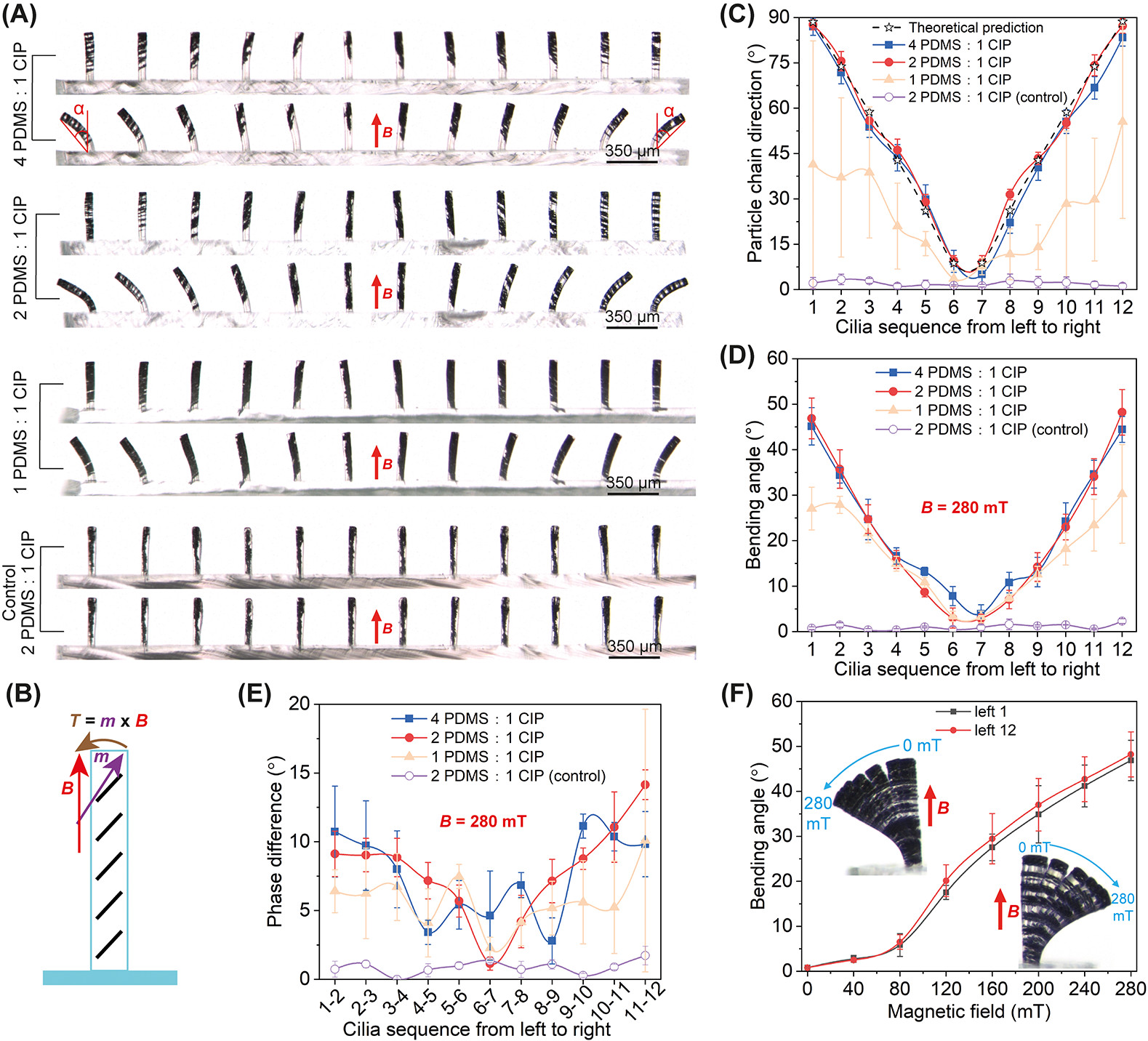
На 2A показано распределение магнитных частиц при различных концентрациях и соответствующее изменение μMAC (изгиб) в статическом вертикальном однородном магнитном поле 280 мТл.
В ходе опытов использовались и контрольные μMAC, в которых распределение парамагнитных частиц было вдоль длинной оси ресничек. В отличие от контрольных μMAC, которые не изгибаются вообще, тестовые μMAC демонстрируют разницу углов изгиба между соседними ресничками для всех трех концентраций магнитных частиц. Это связано с тем, что направление намагничивания каждой реснички близко к направлению ориентации магнитной частицы: магнитная анизотропия μMAC вызвана как анизотропией формы самой реснички, так и анизотропией выравнивания магнитной частицы. Следовательно, из-за возникающего магнитного момента в однородном магнитном поле ресничка изгибается так, чтобы выровнять направление своей цепочки магнитных частиц с приложенным магнитным полем (2B). А степень изгиба зависит от направления и величины намагниченности, а также от жесткости ресничек.
Поскольку выравнивание частиц у соседствующих ресничек разное, они демонстрируют разный изгиб, тем самым реализуя метахрональное движение в однородном магнитном поле (т.е. поле одинаково для всех ресничек).
На графике 2C показаны результаты количественного анализа выравнивания частиц. Для массива ресничек с PDMS/CIP 1:1 выравнивание частиц показывает некоторые вариации для ресничек в том же столбце. Это может быть связано с тем, что высокая концентрация частиц приводит к нежелательному соединению цепочки частиц вдоль длинной оси ресничек. Для контрольного μMAC, напротив, направление цепочки частиц почти идеально ориентировано вдоль длинной оси. На 2D показан угол изгиба (α на 2A) этих μMAC в однородном вертикальном магнитном поле 280 мТл. По результатам анализа видно, что μMAC с PDMS/CIP соотношением 2:1 демонстрируют самый плавный переход угла изгиба от реснички к ресничке, т.е. наблюдается метахрония. Попытки использовать соотношение PDMS/CIP 4:1 закончились не очень успешно (2E), так как реснички изгибались непоследовательно. Это связано с неоднородностью смеси, что приводит к относительно большому изменению магнитных свойств μMAC внутри одной колонки ресниц.
На 2F показано поведение ресничек, расположенных на двух конечных сторонах одного ряда μMAC, в ответ на магнитное поле разной силы. Как и ожидалось, обе реснички демонстрируют одинаковое поведение.
Их угол изгиба сначала медленно увеличивается до 80 мТл магнитного поля, затем резко увеличивается, когда поле между 80 и 120 мТл, и снова медленно увеличивается, когда поле выше 120 мТл. Такое поведение является результатом конкуренции между упругой жесткостью реснички и магнитным моментом, действующим на ресничку.
Поведение при изгибе всего ряда μMAC при воздействии магнитного поля.Дабы проверить, будет ли массив метахронно двигаться за счет воздействия магнитного поля, была создана тестовая установка из двух постоянных магнитов (50×50 х 12.5 мм) с противоположными магнитными полюсами, обращенными друг к другу на расстоянии 50 мм (3A).

Изображение №3
Магниты установлены в раме с приводом от электродвигателя. Таким образом, двумерное вращающееся квазиоднородное магнитное поле силой приблизительно 150 мТл создается в центральном пространстве между двумя магнитами, где расположен массив μMAC.
На поверхности массива μMAC расположен микрожидкостный чип (3В), а сам массив расположен внутри квадратного циркуляционного канала с прямоугольным поперечным сечением (высота 2 мм и ширина 6 мм). Камера, установленная на микроскопе, использовалась для наблюдения за движением массива во вращающемся однородном магнитном поле и за генерируемым потоком жидкости (3А).
На 3C показано движение одного ряда μMAC (шаг 550 мкм) во вращающемся однородном магнитном поле с частотой 1 Гц в воде.
Движение одного ряда μMAC (шаг 550 мкм) во вращающемся однородном магнитном поле.Стоит отметить, что частота μMAC в два раза превышает частоту вращения магнитов, что вызвано симметрией генерируемого магнитного поля в первой и второй половинах одного цикла вращения двигателя. Также на 3C отчетливо видно, что массив μMAC совершает волнообразное движение, т.е. демонстрирует метахронию.
В отличие от тестируемых μMAC, контрольные μMAC демонстрируют синхронное движение ресничек.Шаг в 550 мкм между ресничками был выбран, так как при меньшем шаге недостаточно пространства для совершения движения ресничек без их соприкасания, как при шаге в 350 мкм.На 3D видно, что каждая ресничка выполняет двумерное симметричное движение, состоящее из двух «рывков»:
- магнитный удар, когда ресничка в основном следует за приложенным магнитным полем и изгибается влево, тем самым накапливая упругую энергию;
- упругий ход, когда кончик реснички начинает двигаться вверх и возвращается в исходное положение, высвобождая накопленную упругую энергию.
Демонстрация движения реснички в воде и в глицерине.
В видео выше видно, что ресничка колеблется в течение определенного времени в конце упругого удара, прежде чем она достигнет состояния равновесия в воде, но не в глицерине. Это результат конкуренции между силами упругости, магнитными силами и вязким сопротивлением жидкости, последнее примерно в 1000 раз больше в глицерине, чем в воде.
Также видно, что соседние реснички совершают движения с разными углами раскрытия. В частности, движение ресничек 4, 5 и 6 имеет больший угол раскрытия, чем у других. Это вызвано тем фактом, что реснички в центральной части массива μMAC (реснички 4, 5 и 6) содержат более длинные цепочки магнитных частиц и, следовательно, более сильную намагниченность, чем реснички на обоих концах массива (реснички 1, 2, 3, 7 и 8). Кроме того, левая часть массива μMAC выполняет почти точно такое же движение, что и правая часть массива μMAC, то есть поведение симметрично относительно центра массива. Это связано с одинаковым распределением магнитных частиц в противоположных ресничках.
Метахронное движение μMAC приводило к генерации жидкостного потока воды (3E) и глицерина (3F) в микрофлюидном чипе. Максимальная скорость потока воды составила 220 мкм/с, которая создается метахрональным μMAC с шагом 350 мкм при 10 Гц. Это соответствует объемному расходу 85 мкл/мин и локальному падению давления 0.027 Па в микрофлюидном канале.
Максимальная скорость потока глицерина составляет 5.5 мкм/с, что также была получена при использовании μMAC с шагом 350 мкм и 10 Гц. Это соответствует объемному расходу 2.1 мкл/мин и локальному падению давления 1 Па в микрофлюидном канале.
Ученые заявляют, если детальнее рассмотреть графики 3E и 3F, то можно установить следующее:
- генерируемый поток воды имеет то же направление, что и направление распространения метахрональной волны, и направление упругого хода, а поток глицерина противоположен направлению распространения метахрональной волны;
- контрольный μMAC не приводил к возникновению потоков глицерина;
- массив μMAC с меньшим шагом, т.е. с большим числом ресничек, генерирует более сильный поток воды, но это не всегда так для глицерина;
- скорость воды линейно увеличивается с частотой «взмахов» μMAC, а скорость глицерина имеет менее линейную зависимость от частоты «взмахов» ресничек;
- поток воды, создаваемый метахрональным μMAC, примерно в два раза больше потока, создаваемого контрольным μMAC.

Изображение №4
В основе происходящего лежат инерционные эффекты, асимметричное движение и, естественно, метахрония. На 4A видно, что максимальная скорость внешнего кончика реснички во время упругого удара в воде находится в пределах нескольких м/с, что приводит к максимальному локальному числу Рейнольдса* (Remax) в пределах сотен, независимо от частоты взмахов (4B). Среднее значение Re составляет 0.1 при 1 Гц и 1 при 10 Гц.
Число Рейнольдса* — величина, описывающая отношение инерционных сил к силам вязкого трения в вязких жидкостях и газах.Из этого следует, что инерционные эффекты преобладают над вязкими эффектами в воде во время упругого хода, но не во время магнитного. В глицерине, с другой стороны, реснички движутся намного медленнее, а Remax намного меньше 1 в течение всего цикла, т.е. преобладают вязкие эффекты.
На 4C видно, что каждая ресничка соприкасается с той же областью во время магнитного хода и во время упругого. Это означает, что движение μMAC является симметричным как в воде, так и в глицерине.
За счет вышеописанных данных можно объяснить разницу в направлении потоков воды и глицерина. В глицерине работает только метахрония, и противофазное движение массива μMAC создает чистый градиент давления, который приводит к потоку, противоположному направлению метахрональной волны.
Если же говорить о воде, то тут действует не только метахрония, но и инерционные эффекты. Последние приводят к формированию потока в направлении упругого удара, то есть в направлении распространения метахронной волны.
Важно отметить, что любые эффекты, воздействующие на μMAC и на потоки жидкости, поддаются не только численной оценке, но и манипуляции, за счет чего можно менять свойства массива и, как следствие, его функционал.
Одним из самых очевидных вариантов применения μMAC являются мягкие роботы, интерес к которым за последние годы растет в геометрической прогрессии. Создатели μMAC решили продемонстрировать, что их разработка отлично подходит для создания роботов, способных за счет метахронального движения ресничек перемещаться как по плоской поверхности, так и взбираться на склоны с углом до 180° (в воздушной, не в жидкостной среде).
В качестве испытуемого робота выступил массив μMAC с шагом 350 мкм (т.е. 12×10 = 120 ресничек), длина которого составила 4 мм, а ширина 3.5 мм. В опытах было задействовано два типа роботов: метахронные — из метахрональных μMAC; контрольные — из синхронно движущихся μMAC.
Демонстрация движение метахронного робота (соответствует снимкам на 5A).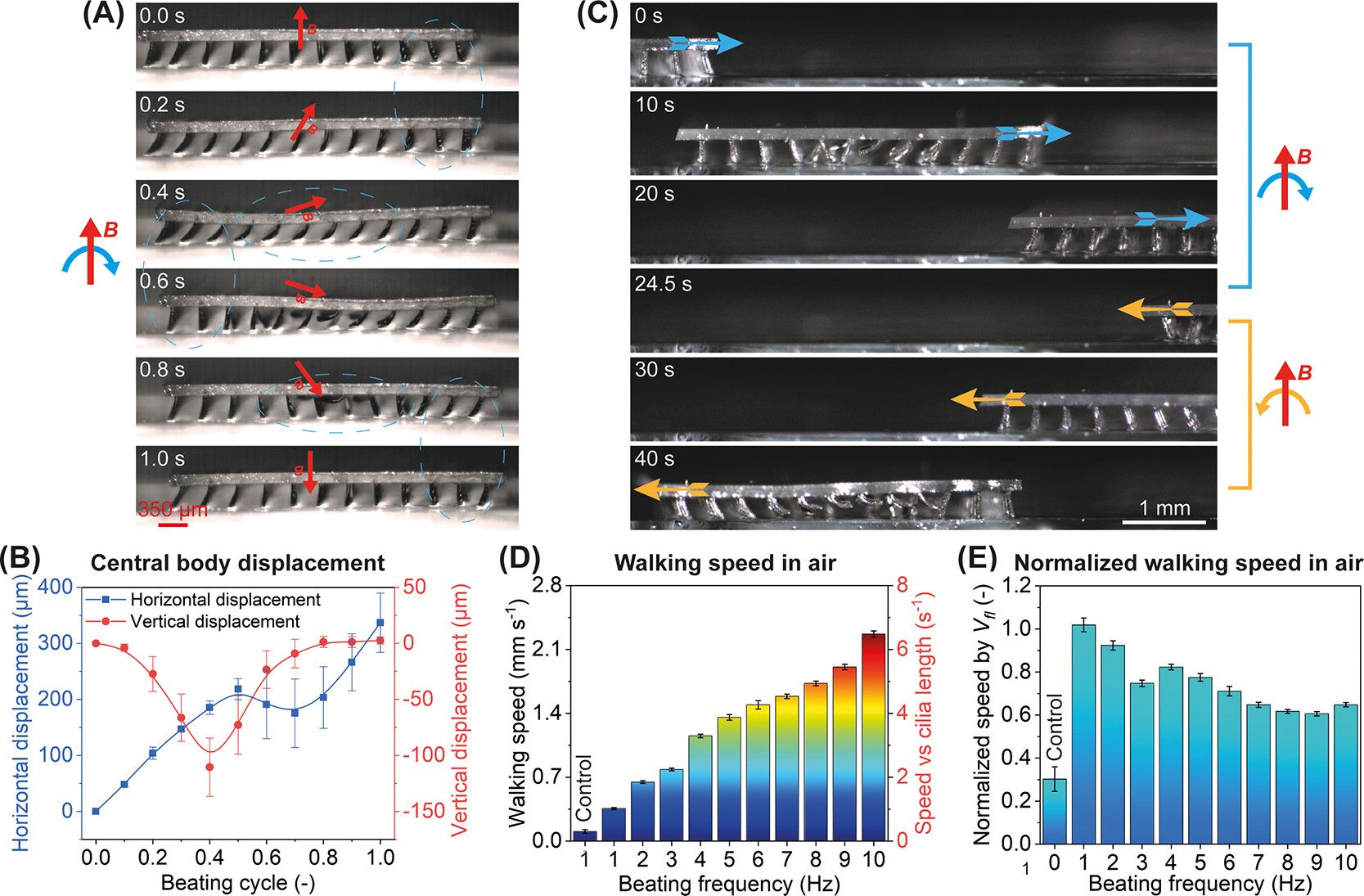
Изображение №5
Стоит отметить, что все поверхности (стекло), по которым роботы должны были перемещаться, были покрыты тонким слоем смазочного материала, чтобы обеспечить нужную адгезию между μMAC и поверхностью. Из-за слишком низкой адгезии (слишком много смазки) реснитчатый робот останется прилипшим к поверхности, не двигаясь вперед, а из-за слишком высокой адгезии (отсутствует или мало смазки) робот вообще не сможет двигаться. На 5В количественно показано смещение центральной точки тела робота как в горизонтальном, так и в вертикальном направлении.
В начале опыта магнитное поле перпендикулярно поверхности стекла, а μMAC изгибаются в направлении, которое зависит от их расположения в массиве. Когда магнитное поле начинает вращаться по часовой стрелке передние μMAC (справа) начинают изгибаться влево. Из-за адгезии между ресничками и поверхностью это движение заставляет тело метахрональных мягких роботов (толщиной 150 мкм) двигаться вперед. При этом задние μMAC пытаются изгибаться вправо, но из-за трения они остаются более изогнутыми влево и перемещаются вперед вместе со всем телом робота. С течением времени, когда магнитное поле продолжает вращаться, центральная часть тела робота перемещается вниз вместе с изгибом μMAC в средней части массива, что толкает робота вперед. На 0.6–0.8 секунде вращения магнитного поля массив μMAC метахронно изгибается вправо, что поднимает робота вверх и толкает его немного назад в результате конкуренции между силами трения и сцепления, действующими на передние и задние μMAC, соответственно. В завершение цикла (на 0.8–1.0 секунде вращения поля) передние μMAC возвращается в исходное положение, чем еще раз толкают робота вперед. В результате за один цикл вращения поля метахрональный робот продвинулся вперед примерно на 0.35 мм. Стоит отметить, что направление движения робота можно изменить на противоположное, если просто изменить направление вращения магнитного поля также на противоположное (5C).
Демонстрация двунаправленного движения робота.Метахронные роботы двигались в три раза быстрее роботов из контрольной группы (5D). Отличие было и в форме тела роботов: у метахронного оно изгибалось в ходе движения, а у контрольно оставалось неизменным.
Демонстрация робота из контрольной группы, движение ресничек которого было синхронным, а не последовательным.Максимальная скорость движения робота составила 2.3 м/с при 10 Гц (5E), что соответствует примерно 7-кратной длине ресничек в секунду, а это можно сравнить со скоростью бега у человека.
В заключение ученые показали, насколько эффективно их роботы преодолевают препятствия, и какие грузы могут при этом переносить.

Изображение №6
На 6A показано, что робот может преодолевать небольшой холм с уклоном в 45°. Основные проблемы возникают в точке образования склона, так как лишь часть массива μMAC может касаться поверхности в этих местах.
Демонстрация способности робота взбираться на склон.На 6B показаны результаты тестов, в ходе которых на роботов помещали различный груз, а они должны были преодолеть склон разного наклона так в воздушной, так и в жидкостной среде. Прежде всего видно, что роботы могут преодолевать склоны до 180° в воздухе. Это возможно за счет адгезии ресничек к поверхности, преодолевающей силу тяжести. При этом силы сцепления, управляющие движением, остаются одинаковыми для всех склонов.
Демонстрация способности робота преодолевать склоны с разным углом наклона (от 0 до 180°).На 6C показано, что метахронный робот весом 2 мг может нести стеклянное зерно весом 25 мг в воде со скоростью 0.2 длины ресничек за цикл и в этаноле со скоростью 0.3 длины ресничек за цикл.
Демонстрация способности робота двигаться с грузом.Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В данном исследовании ученые в очередной раз обратились за вдохновением к самому известному его источнику — к природе. Многие микроскопические организмы, некоторые виды клеток и даже целые биологические системы оснащены мелкими цилиями (ресничками), с помощью которых они осуществляют движение (себя либо чего-то другого). Важной особенностью этих ресничек является их последовательное движение, т.е. метахрония.
Ученые создали массив, состоящий из одинаковых искусственных ресничек, расположенных на определенном расстоянии друг от друга. В каждой из них содержалось определенное число парамагнитных частиц, реагирующий на воздействие магнитного поля. Когда массив помещали внутрь установки, состоящей из двух противоположно расположенных вращающихся магнитов, реснички начали реагировать на вращающееся магнитное поле.
За счет этого массив двигался вперед (или назад, если магнитное поле вращалось в обратную сторону) как в воздушной среде, так и в жидкостной (вода или глицерин). По мнению ученых их разработка отлично подойдет для создания мягких роботов, что они и продемонстрировали на практике. Созданный робот мог двигаться и на плоской поверхности, и взбираться на крутые склоны, и даже переносить груз, значительно превышающий массу его тела. Максимальная скорость движения робота составила 2.3 м/с, что сравнимо со скоростью бега человека.
Данная разработка, как и любое новое творение, требует совершенствования, чем ученые и намерены заняться в будущем. Однако уже сейчас они с уверенностью заявляют, что их детище отлично подойдет для создания микрофлюидных насосов и гибких мягких роботов для биомедицины.
Благодарю за внимание, оставайтесь любопытствующими и хорошей всем рабочей недели, ребята. :)
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5–2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5–2697v3 2.6GHz 14C 64GB DDR4 4×960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5–2430 2.2Ghz 6C 128GB DDR3 2×960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5–2650 v4 стоимостью 9000 евро за копейки?
