HD FPV на Raspberry Pi
Малиновый HD FPV пенолет
 Детально ознакомившись со статьей коллег Проба железа для HD FPV было принято решение повторить подвиг на базе Raspberry Pi + Pi Camera.Введение
С главной идеей хабраюзера Gol насчет аналогового FPV, полностью согласен! В цифровой век наслаждаться PAL сигналом, сродни вдыханию аромата цветов в противогазе (ИМХО). Вооружившись малиновым комплектом было решено снять противогаз видео высокого разрешения, транслировать его в реалтайме на землю, а на земле насладиться ароматом цветов полетать глядя в монитор, а в перспективе в HD очки.Raspberry Pi
Детально ознакомившись со статьей коллег Проба железа для HD FPV было принято решение повторить подвиг на базе Raspberry Pi + Pi Camera.Введение
С главной идеей хабраюзера Gol насчет аналогового FPV, полностью согласен! В цифровой век наслаждаться PAL сигналом, сродни вдыханию аромата цветов в противогазе (ИМХО). Вооружившись малиновым комплектом было решено снять противогаз видео высокого разрешения, транслировать его в реалтайме на землю, а на земле насладиться ароматом цветов полетать глядя в монитор, а в перспективе в HD очки.Raspberry Pi Pi Camera
Pi Camera Для вайфай моста использовали проверенные ubiquiti bullet m2 hp.
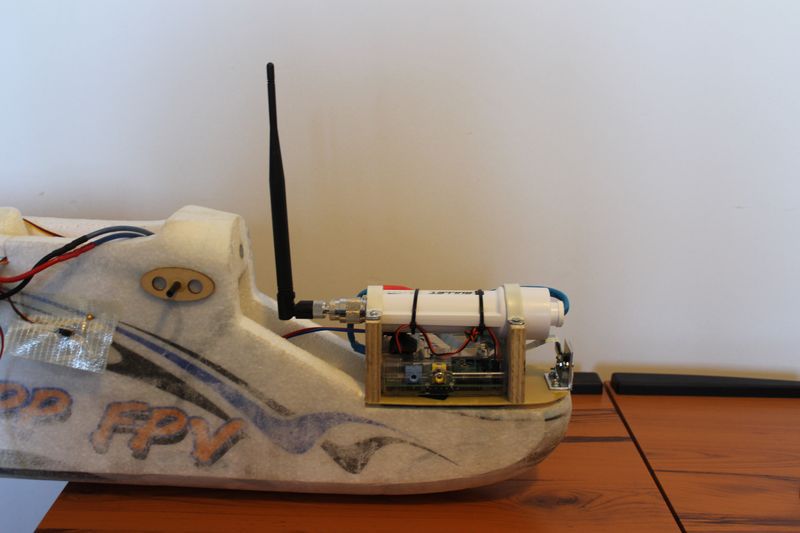
Для вайфай моста использовали проверенные ubiquiti bullet m2 hp. Данный вайфай модуль замечательно подходит для мобильных платформ т.к. легко запитывается с помощью POE от бортовой АКБ, достаточно подать питание на две пары (7–24В, синяя пара+, коричневая пара-), имеет малые размеры, обладает хорошей мощностью и промышленным исполнением. Так же приятным бонусом идет модель на 5.8 ггц в аналогичном форм факторе, что позволяет не меняя конструкцию платформы перейти на другой диапазон частот, просто заменив вайфай модуль и антенну.В качестве экспериментального носителя безумных идей тестируемого оборудования мы давно используем пенолет (пенопласт летающий) приобретенный на хоббикинге. На данном аппарате практически отрабатываются все возникающие идеи связанные с БПЛА.
Данный вайфай модуль замечательно подходит для мобильных платформ т.к. легко запитывается с помощью POE от бортовой АКБ, достаточно подать питание на две пары (7–24В, синяя пара+, коричневая пара-), имеет малые размеры, обладает хорошей мощностью и промышленным исполнением. Так же приятным бонусом идет модель на 5.8 ггц в аналогичном форм факторе, что позволяет не меняя конструкцию платформы перейти на другой диапазон частот, просто заменив вайфай модуль и антенну.В качестве экспериментального носителя безумных идей тестируемого оборудования мы давно используем пенолет (пенопласт летающий) приобретенный на хоббикинге. На данном аппарате практически отрабатываются все возникающие идеи связанные с БПЛА. Достоинства данного аппарата — это легкость установки необходимого оборудования, простота пилотирования, грузоподъемность и колоссальная ремонтопригодность. Последняя особенность не раз выручала после крашей, все собирается на эпоксидном клее и наш бронепоезд пенолет снова готов к краштесту полету.
Достоинства данного аппарата — это легкость установки необходимого оборудования, простота пилотирования, грузоподъемность и колоссальная ремонтопригодность. Последняя особенность не раз выручала после крашей, все собирается на эпоксидном клее и наш бронепоезд пенолет снова готов к краштесту полету.
Полезная нагрузка пенолета
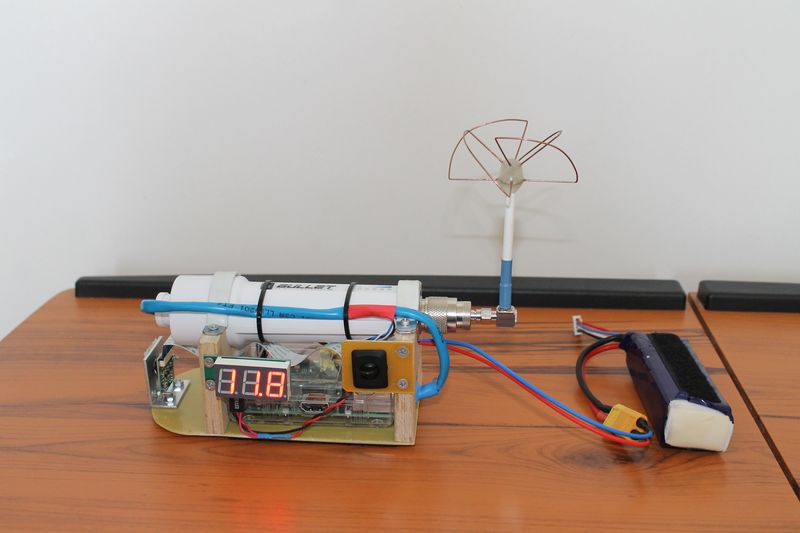
 Камера
Малина под управлением Raspbian
Вайфай модуль с антенной
Индикатор напряжения
Главный тумблер
Блок питания малины
Разъем АКБ
В качестве антенн использовался самодельный клевер на 2.4 ггц от аналогового FPV и обыкновенный вайфай штырь.Земля
Камера
Малина под управлением Raspbian
Вайфай модуль с антенной
Индикатор напряжения
Главный тумблер
Блок питания малины
Разъем АКБ
В качестве антенн использовался самодельный клевер на 2.4 ггц от аналогового FPV и обыкновенный вайфай штырь.Земля



 Ноутбук под управлением Ubuntu 12.04 LTS с солнечным козырьком
Атена D-Link ANT24–0801
Вайфай модуль
АКБ питания модуля
Антенна была выбрана из расчета широкой диаграммы направленности 70 град по вертикали, 70 град по горизонтали.Софт
Трансляция осуществлялась с помощью Gstreamer.Первый важный момент. Настройку софта мне делал коллега, за что ему спасибо. Я просто приведу использованные скрипты для запуска трансляции на малине и приема видеопотока на ноутбук.
Ноутбук под управлением Ubuntu 12.04 LTS с солнечным козырьком
Атена D-Link ANT24–0801
Вайфай модуль
АКБ питания модуля
Антенна была выбрана из расчета широкой диаграммы направленности 70 град по вертикали, 70 град по горизонтали.Софт
Трансляция осуществлялась с помощью Gstreamer.Первый важный момент. Настройку софта мне делал коллега, за что ему спасибо. Я просто приведу использованные скрипты для запуска трансляции на малине и приема видеопотока на ноутбук.
Борт
raspivid -n -w 1280 -h 720 -b 4500000 -fps 30 -vf -hf -t 0 -o — | \ gst-launch-1.0 -v fdsrc! h264parse! rtph264pay config-interval=10 pt=96$ udpsink host=192.168.4.204 port=9000Земля
gst-launch-1.0 -v udpsrc port=9000 caps='application/x-rtp, media=(string)video, clock-rate=(int)90000, encoding-name=(string)H264' ! rtph264depay! avdec_h264! videoconvert! autovideosink sync=falseПоехали…
Второй важный момент. Я не являюсь пилотом. Управлял пенолетом опытный пилот, за что ему отдельная благодарность. Летаем мы давно и успешно на разных аппаратах. На данном этапе я выступал в качестве стартового разгонного блока.


 … Приехали
С полетами сложилось ровно три раза, т.к. все таки, самолет мы перегрузили, запихав в него ну очень большую АКБ в надежде ну очень долго полетать. Из-за этого и так тихоходный аппарат стал совсем неповоротливым. При заходе на посадку не удалось побороть боковой порыв ветра, аппарат завалился на крыло и ткнулся носом в землю. Большой и тяжелый АКБ решил вырваться наружу и таки вырвался, слегка разворотив пенопластовый фюзеляж (про ремонтопригодность я писал, эпоксидка уже высохла, бронепоезд пенолет уже готов к бою полету). В целом оборудование не пострадало. Но нет худа без добра… HD FPV БЫЛО!
… Приехали
С полетами сложилось ровно три раза, т.к. все таки, самолет мы перегрузили, запихав в него ну очень большую АКБ в надежде ну очень долго полетать. Из-за этого и так тихоходный аппарат стал совсем неповоротливым. При заходе на посадку не удалось побороть боковой порыв ветра, аппарат завалился на крыло и ткнулся носом в землю. Большой и тяжелый АКБ решил вырваться наружу и таки вырвался, слегка разворотив пенопластовый фюзеляж (про ремонтопригодность я писал, эпоксидка уже высохла, бронепоезд пенолет уже готов к бою полету). В целом оборудование не пострадало. Но нет худа без добра… HD FPV БЫЛО! 

Вот ради чего все затевалось! 
HD FPV было… только вот не далеко. Реально удавалось получить видео без лагов на очень малом участке поля.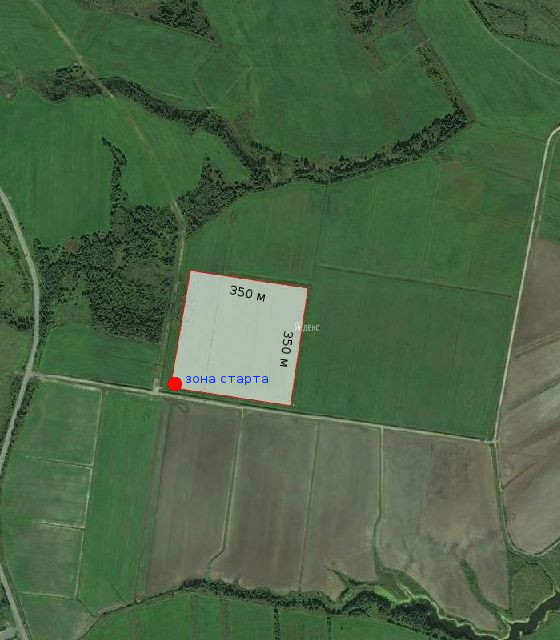
Штыревая антенна согласно своей диаграмме направленности (горизонтальный бублик) ведет себя… как штыревая антенна, т.е. на высоте и при сильных наклонах/виражах, когда лепесток не попадает в приемную антенну начинаются лаги.Видео со штыревой антенны, писал с экрана монитора 15 fps… некоторую картину происходящего дает.[embedded content]
В дальнейшем будет настроена прямая запись принимаемого потока.
Антенна «клевер» имеет шарообразную диаграмму направленности, но не очень высокую дальность для нашего канала, поэтому при «дальних» пролетах также вылезали грабли на изображении. Видео к сожалению нет.
После краша были проведены два похода пешком по полю с разными антеннами и как говорится, результат немного предсказуем: дальность оставляет желать лучшего, штыревая антенна работает чуть дальше 300–400 метров, если плоскость лепестка (бублика) попадает в приемную антенну, «клевер» можно вертеть как угодно, но т.к. вещает он во все стороны одинаково дальность еще меньше чем у «штыря» до 300 метров.
Выводы Полеты HD FPV — это реальность! РАБОТАЕТ! В остальном выводы такие же как и у Gol. Слабое место вайфай, точнее бортовая антенна, если на земле можно развернуть поворотную станцию слежения за БПЛА с узконаправленной антенной, то вот с бортом надо изобретать что то еще. Оптимизировать работу вайфай канала, используемые модули имеют много настроек, надо более детально покопать там. Оптимизировать (минимизировать) поток с борта. И естественно продумать решение с бортовой антенной.
P.S. Обнаружил в настройках вайфай модуля «Земля», что была выставлена малая мощность сигнала 10dBm вместо положенных 28dBm. Это провалЕсть над чем работать.
Планы на ближайшее будущее Поставить на борт высокоинтеллектуальные мозги Ardupilot 2.0 (ссылка на немного позднюю модель), благо они есть и на данном пенолете уже давно обкатаны — это позволит не нервничать пилоту и улетать далеко, т.к. мозги по команде возвращают на автопилоте пенолет в место старта и, что важно, стабилизируют планер в горизонтальной плоскости даже при разворотах — это позволит более эффективно протестировать штыревую антеннy. Установить (уже в пути из Китая) и протестировать потолочную антенну 2.4 ггц. У неё диаграмма направленности полусфера обращенная вниз, как говорится будем посмотреть. Протестировать модули на 5.8 ггц. Организовать на земле запись потока в файл, а то как то не по человечески получается. P.S. И таки включить выжигатель мозга излучатор на полную мощность! Третий важный момент и благодарность моей супруге за моральную поддержку и умелое владение фотоаппаратом, без чего не получились бы отличные фотки всего процесса.
