Георадар + магнитометр = глубинный металлоискатель с дискриминацией (прибор Itm-1)
Прибор Itm-1 нашей разработки представляет собой комбинацию георадара, магнитометра и лидара. Такой прибор дает наиболее полное представление о подземных заглубленных объектах. По данным георадара определяется наличие и глубина залегания объекта, а по данным магнитометра уточняется наличие магнитной аномалии. По результатам такой обработки можно сделать заключение о материале заглубленного объекта — неметаллический, металлический-магнитный, металлический-немагнитный (цветной металл). Наличие лидара позволяет выполнять взаимную привязку положений подземных и наземных объектов, что может быть полезным при работе в густом лесу, а также в зоне расположения глушилок ГНСС, когда спутниковая навигация становится малопригодной. Такой прибор может применяться в археологических исследованиях, ликвидации минных заграждений, мониторинге и диагностике подземных коммуникаций, кладоискательстве и тд.
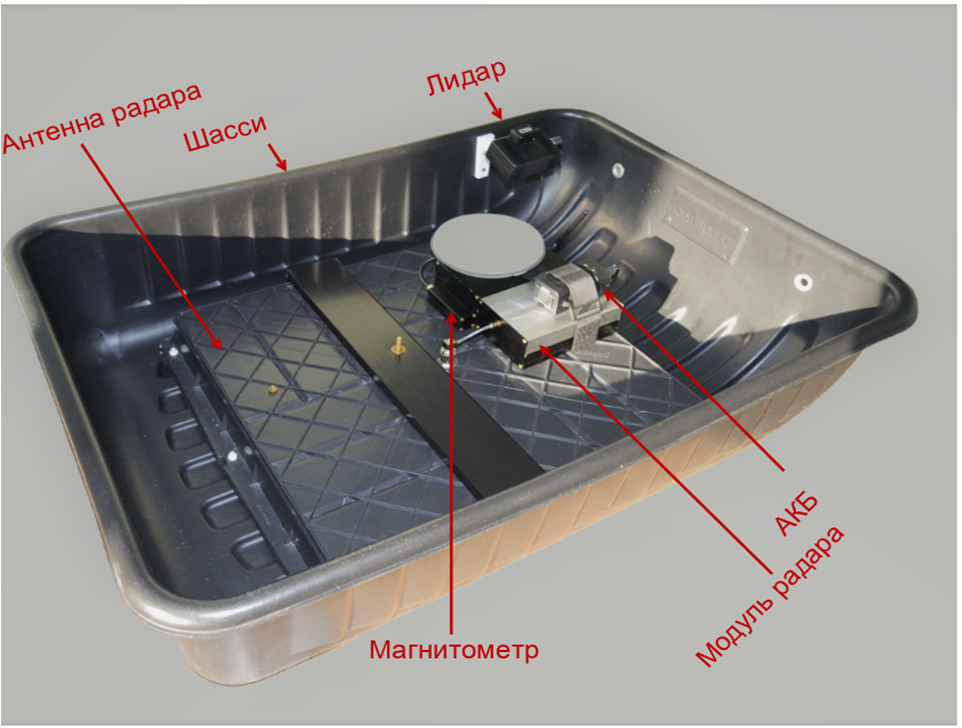
Внешний вид прибора Itm-1 показан на рисунках 1, 2, 3.


Методика поиска таким прибором заключается в перемещении саней-волокуш с прибором (рис. 1) по земле с обычной скоростью пешехода (3–5 км/ч). Характерный вид профилей, получаемых с применением прибора Itm-1, приведены на рисунках 4, 5. Далее будут подробно приведены объяснения по анализу и интерпретации таких данных.


Основные характеристики прибора:
— максимальная глубина обнаружения — более 10 м*;
— точность определения глубины — 5 см для характерного материала с ε=9 (асфальт, бетон, мокрый песок, ε — диэлектрическая проницаемость);
— дискриминация металла по признаку магнитный/немагнитный;
— встроенный лидар для привязки к наземным объектам;
— встроенный барометр-высотомер;
— время непрерывной работы: 3 часа;
— привязка к местности: GPS/GLONASS, лидар;
— температура эксплуатации (градусов по цельсию): минус 30 — плюс 30;
— не требует настройки, работает по принципу «включил и пошел», большинство настроек можно изменить в постобработке;
— отсутствуют провода и кабели, результаты измерений передаются по WiFi на смартфон пользователя;
— частота измерений*
георадара — 15–200 измерений в секунду;
магнитометра и лидара — 10 измерений в секунду;
— Размеры (мм), без шасси — 600×600х200, с шасси (сани-волокуши) — 920×690х240,
— масса (кг), без шасси — 5,5, с шасси — 8,3.
— высокая помехозащищенность: возможность работы в зоне высоковольтных ЛЭП и в густом лесу.
— Собственная аппаратная и программная разработка, что означает возможность доработки аппаратуры под задачи и требования заказчика. Возможность поставки исходных кодов программного обеспечения и обучения работы с ними.
*Некоторые характеристики (например, глубина, частота измерений) требуют уточнения для различных условий применения и будут обсуждены ниже.
Описание составных частей прибора Itm-1. Основные составные части прибора: георадар (нашей разработки), магнитометр (покупной), лидар (покупной).
Георадар. Для начала, немного теории. На георадар возлагаются две основные задачи. Первая задача георадара состоит в том, чтобы сформировать электромагнитную волну и направить ее вглубь земли. Для этого в георадаре имеются передатчик и антенна. Далее, распространяясь в земле, такая электромагнитная волна встречает неоднородности (камни, трубы коммуникаций, воду и тд). Неоднородностями принято обозначать объекты, отличающиеся от земли по величине диэлектрической проницаемости. Встречая на своем пути неоднородности, часть мощности сигнала отражается в сторону георадара и регистрируется приемником, часть мощности проходит далее — вглубь (рис. 6). Причем, доля отраженной энергии ® тем выше, чем выше контраст (разница) в диэлектрической проницаемости земли и неоднородности (K1 и K2).

Так, контраст между землей (К1 ~ 5–50) и металлом (К2 = ∞) является наибольшим, в связи с чем доля энергии сигнала, отраженного от границы раздела двух сред, составит R=100%. Поэтому обнаружение металлических объектов представляет собой относительно простую задачу. При распространении сигнала в сухой земле (К1 = 5), доля энергии сигнала, отраженного от камня (К2 = 6), составит всего R = 5%. Поэтому обнаружение такого сигнала значительно усложняется.
Вторая задача георадара состоит в измерении времени, которое затратил сигнал с момента излучения до момента приема. Георадар не измеряет глубину или расстояние до объекта, измеряет только время. Зная время и скорость распространения сигнала (в корень из K1 раз меньше скорости света в вакууме) исследуемой среды, можно выразить глубину. Диэлектрическая проницаемость оценивается приближенно, исходя из контекста измерений (например, болото, сухой песок, асфальт). При перемещении георадара (сканировании) по поверхности земли, на монитор выводится профиль (совокупность отраженных и обработанных сигналов). Анализ профиля заключается, как правило, в поиске гипербол на профиле. Такие гиперболы образуются при приближении георадара к локализованной подземной неоднородности и удалении от нее — так образуются левый и правый усы гиперболы соответственно (рисунок 2). Форма гиперболы определяется в том числе диэлектрической проницаемостью К1 земли, поэтому по результатам измерения гиперболы можно уточнить величину К1 и, соответственно, глубину залегания неоднородности.

Гипербола — основной элемент, который необходимо найти на радарограмме и проанализировать.
Итак, обнаружение гиперболы означает обнаружение объекта в земле. По виду гиперболы можно отличить металлический объект от неметалла (например, камня).
Для металлических целей выделяют две основные особенности гипербол (рис. 3):
1 мощная яркая гипербола;
2 повторяющаяся гипербола («звон»).

Пример прохода над металлической трубой приведен на рисунке 9. Кроме указанной на рисунке 9 трубы, профиль содержит массу других гипербол, которые представляют собой отдельные неоднородности в грунте (камни или даже исторические артефакты) и которые не видны невооруженным глазом.

Стоит отметить, что повторяющаяся гипербола может также появиться, например, от воды, скопившейся в подземной полости, или линзы из мокрой глины. В этой ситуации решающую роль играет профессионализм оператора и контекст ситуации (например, при сильных заморозках такую ситуацию можно исключить).
Георадар из состава прибора Itm-1 имеет следующие основные характеристики:
— тип сигнала — непрерывный ЛЧМ, период свипирования — 1 мс;
— частотный диапазон: (50 — 1050) МГц, полоса сигнала (девиация частоты);
— частота измерений: до 200 раз в секунду при временной развертке 500 нс;
— разрешение по глубине: 5 см для характерного материала с ε=9 (асфальт, бетон, мокрый песок);
— мощность передатчика: 0 dBm;
— температура эксплуатации: минус 300c — плюс 300c;
— температура хранения: минус 500c — плюс 500c;
— время непрерывной работы: 3 часа;
— тип антенны — экранированная. Экран почти полностью подавляет излучение в верхнюю полусферу и к наземным объектам. Примененная конструкция приводит к превосходной (по сравнению с другими радарами) помехозащищенности: высоковольтные ЛЭП и деревья не оказывают влияния на работу георадара.
Георадар работает в двух основных режимах:
— 1-й режим: наблюдение профиля в реальном времени и запись результатов в файл. В этом режиме частота измерений составляет примерно 15 раз в секунду. Обновление профиля на экране происходит 1 раз в секунду.
— 2-режим: запись в файл без наблюдения в реальном времени. В этом режиме частота измерений составляет от 40 (по умолчанию) до 200 раз в секунду.
Мы работаем как правило во втором режиме (без наблюдения в реальном времени), поскольку длина профилей обычно составляет несколько километров. Наблюдение таких длинных профилей в реальном времени утомляет, и анализ лучше проводить за компьютером с большим монитором.
Георадар разработан на основе технических решений, описанных мной ранее в статьях: статья 1, статья 2.
Определить тип металла по данным георадара нельзя. Для устранения этого недостатка в прибор Itm-1 установлен магнитометр, по данным которого уточняется наличие магнитной аномалии. При отсутствии магнитной аномалии выдвигается предположение о немагнитном характере металла (с высокой долей вероятности — цветной металл).
Магнитометр. В качествемагнитометра используется трехкомпонентный феррозонд со следующими характеристиками:
— чувствительность по каждому направлению — 15 нТл;
— частота измерения — 10 Гц;
— высокая температурная стабильность (как от самонагрева, так и от солнца);
— независимость результатов измерений от направления движения (например, результаты измерений в точке не должны зависеть от направления прохода юг-север или восток-запад, не должны зависеть от поворота магнитометра вокруг вертикальной оси).
Навигация. Для определения ГНСС координат применяем популярные приемникиNeo-m8t или ZED-F9P с антенной BT-800D. Такая комбинация обеспечивает неплохую точность определения координат, в том числе в лесу.
Особенностью приемников является возможность выдачи сырых RAW данных, которые можно использовать в режиме PPK (post processing kinematic) для получения сантиметровой точности в постобработке. Для режима PPK в настоящее время разрабатывается своя базовая станция. А сам режим PPK будет введен позднее при заинтересованности заказчиков.
Сейчас основной упор в навигации сделан на совместное использование приемника ГНСС (без поправок) и лидара. Используемый лидар позволяет определять дальности от 0,1 м до 10 м с точностью около 1 см. Частота измерения — 10 Гц. Режим работы лидара можно регулировать наклоном лидара. Так, можно отслеживать рельеф дороги (ямки и камни на дороге), а можно отслеживать только высокие наземные объекты (деревья, столбы и тд).
Пример такой обработки (съемка проводилась в лесу) приведен на рисунке ниже, где каждая черная отметка означает отдельное дерево.

Испытания прибора Itm-1.Испытания прибора на известных инженерных коммуникациях в лесу показали следующие результаты:
1отсутствуют каких-либо отметки на радаре от деревьев (отсутствуют воздушные помехи).
2 Все инженерные коммуникации найдены, характерный получаемый профиль, без какой-либо обработки (только вычитание среднего), приведен на рисунках ниже.


Также имеется возможность размещать траектории движения и результаты измерений на спутниковых снимках в Google Earth. На рисунках ниже приведены примеры данных магнитометра и радара.


Особенности применения. Прибор Itm-1 прост в освоении. Для начала работы достаточно нажатия одной кнопки. Все трудности начинаются при анализе записанных данных. Так, область видимости магнитометра значительно шире области видимости георадара. Простыми словами: георадар «видит» только под собой, магнитометр «видит» и под собой, и по бокам, и сверху. Поэтому очень часто возникают ситуации, когда магнитная аномалия не подтверждается радаром. Также может возникнуть обратная ситуация: объект, обнаруженный радаром, не определяется магнитометром из-за металлического забора (столба) поблизости.
Обнаружение и интерпретация гипербол георадара также представляет собой отдельную область знаний геофизики. Качество интерпретаций гипербол также приходит только с опытом.
Такие частные тонкости возникают на каждом объекте. Всегда нужно учитывать контекст работ (время года, влажность и тип почвы и тд). Учет контекста работы приходит только с опытом. Поэтому часто можно услышать от поисковиков «ищет не прибор, а человек». Задача прибора — добыть максимум информации о подземном объекте для анализа человеком. Прибор Itm-1 не дает 100% понимания подземной картины, а лишь представляет собой расширенный набор датчиков для последующего анализа человеком. А основной принцип поисковиков «не выкопаешь — не узнаешь» остается классикой и вряд ли потеряет актуальность в ближайшие десятилетия.
Ответы на часто задаваемые вопросы.
1 Вопрос: какая глубина обнаружения прибора Itm-1?
Ответ: глубина обнаружения определяется глубиной обнаружения георадара из состава прибора и зависит от размеров обнаруживаемого объекта и грунта. Максимальная глубина обнаружения — более 10 метров — в сухом песке, снегу. Наихудшие условия для работы георадара — мокрая глина и морская вода, где глубина обнаружения будет не больше 0,1 м. Георадары не работают в мокрой глине и морской воде из-за высокой концентрации ионов. Для остальных типов грунтов максимальная глубина обнаружения лежит в пределах от 0,1 до 10 м. Причем повышение влажности грунта приводит к снижению глубины обнаружения. По этой причине идеальное время года для работы с радаром в средней полосе России — зима после сильных заморозков.
Минимальный размер объекта, который можно обнаружить георадаром составляет около 10% от глубины залегания. То есть на глубине 2 метра можно обнаружить горшок с золотом диаметром не менее 20 см.
2 Вопрос: можно ли обнаружить монету?
Ответ: монету обнаружить нельзя, только россыпь (горсть) монет. Для поиска монет лучше воспользоваться металлоискателем.
3 Вопрос: Можно ли установить другой магнитометр или лидар?
вет: можно установить любой магнитометр или лидар с UART интерфейсом.
4 Позволяет ли прибор выполнять площадную съемку?
Ответ: площадную съемку можно выполнять только для данных радара. Пример трубы на глубине 1,5 м приведен на рисунке… Площадную съемку для совмещенных данных магнитометра и радара планируем реализовать в ближайшее время.

5 Вопрос: в каком формате сохраняются данные?
Ответ: в формате «HDF5». В поставляемой программе обработки имеется конвертор в формат «CSV».
6 Вопрос: Если прибор отечественный, почему программное меню на английском языке?
Ответ: прибор отечественной разработки, но ориентирован на широкий рынок сбыта. При желании заказчика интерфейс может быть русифицирован за пару дней.
7 Вопрос: при изготовлении прибора применяется отечественная элементная база?
Ответ: вся элементная база импортная, даже латунные винты заказываются в КНР. Наиболее ответственные компоненты (DSP, ADC, СВЧ смесители, СВЧ усилители и т.д.) — Analog Devices и Mini-Circuits. Проблем с поставками пока не было, хоть и сроки возросли после 2022 г.
8 Вопрос: можно ли комплексировать георадар и металлоискатель? Комплексировать георадар, металлоискатель и магнитометр?
Ответ: георадар и металлоискатель можно комплексировать. У нас даже готов прибор, в котором проведено комплексирование георадара и импульсного металлоискателя, но пока не нашлось подходящей практической задачи, чтобы протестировать. Металлоискатель, кстати, тоже нашей разработки.
Комплексировать георадар, металлоискатель и магнитометр нельзя. Металлоискатель и магнитометр не могут работать одновременно, так как металлоискатель создает магнитный шум, и нужная ЭМС не обеспечивается.

9 Вопрос: достаточно ли чувствительности магнитометра 15 нТл?
Ответ: современные магнитометры могут обеспечить чувствительность ниже 0,1 нТл. Насколько мне известно, такая чувствительность необходима археологам для обнаружения, например, нарушения целостности грунта (то есть определить, копался ли грунт в прошлом). С такой задачей лучше всего справится георадар, а не магнитометр. Поэтому, полагаю, что чувствительности магнитометра будет достаточно для большинства поисковых задач.
8 Вопрос: можно ли для отчета совместить наземную и подземную картины для удобного восприятия?
Ответ: Можно. Программное обеспечение позволяет накладывать результаты измерений на фотографии местности, как это показано на рисунке ниже.

PS: Демо-версию программного обеспечения по обработке данных и примеры сырых исходных данных можно скачать: https://disk.yandex.ru/d/rLla808JOeSUCw
