Эволюция методов mesh denoising: от простых фильтров до 3D глубокого обучения

В этой обзорной статье вы узнаете, что такое mesh denoising, какие методы использовались и используются для устранения шума на полигональных сетках (от классических фильтров до передовых графовых нейронных сетей), и получите общее представление о развитии направления.
Зачем нужен mesh denoising?
С помощью технологии трехмерного сканирования можно получить 3D-модель реального объекта. Но знаете ли вы, что почти всегда такие объекты содержат шумы и неточности? В Twin3d мы сканируем людей (и не только) и с помощью фотограмметрии получаем 3D-модели, которые дальше необходимо обрабатывать в зависимости от конечной цели их использования. Естественно, от шумов надо избавляться, чтобы применять виртуальную модель человека в кино/играх/рекламе. Нужно много чего еще делать, но об этом мы поговорим потом.
Сканирование объектов и получение их 3D-моделей используется не только для создания виртуальных людей. Это популярно в reverse engineering для получения CAD-деталей без чертежей, где нужна большая точность реконструкции и шумы недопустимы. Также как людей и CAD-детали, можно сканировать реальные объекты — одежду, обувь, аксессуары, что сейчас очень распространено в связи с созданием виртуальных примерочных. В таких случаях тоже хочется сделать вещь визуально идеальной, поэтому отсканированный объект необходимо обрабатывать.
Процесс устранения шума с 3D-моделей, полученных после сканирования, получил название mesh denoising. Иногда можно встретить слово smoothing, что означает просто «сглаживание». 3D-моделлеры пользуются профессиональным ПО для решения данной задачи, но при этом они тратят достаточно много времени, чтобы убрать все неровности и шероховатости поверхности вручную. А как это делается без вмешательства 3D-моделлера? С помощью методов, которые мы рассмотрим далее.
С чего все начиналось
Когда-то были фильтры… Просто сглаживающие фильтры, которые берут координаты вершин меша и усредняют по соседним вершинам (Laplacian smoothing, Taubin smoothing).
 Laplacian smoothing
Laplacian smoothingВ 2003 году появляется Bilateral mesh denoising — расширение билатерального фильтра (который использовался для сглаживания шума на 2D картинках) на трехмерные полигональные сетки. Суть остается та же — усредняются координаты вершин, но уже немного умнее: используются при этом как координаты вершин, так и нормали вершин. Еще через 7 лет придумали применять такой билатеральный фильтр не к вершинам, а к нормалям граней (Bilateral normal filtering for mesh denoising), что значительно увеличило качество сглаживания.
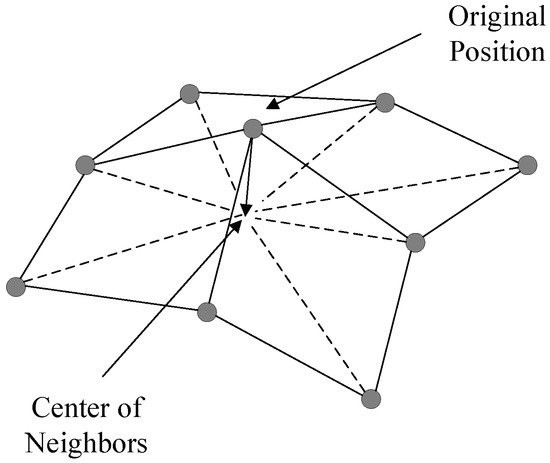
Итеративный процесс вычисления новой нормали с помощью Bilateral Normal Filtering заключается в следующем:

где  — набор соседних граней для грани
— набор соседних граней для грани  ,
,  — нормаль грани
— нормаль грани  ,
,  — площадь грани
— площадь грани  ,
,  — центроид грани
— центроид грани  (точка пересечения медиан треугольника),
(точка пересечения медиан треугольника),  — гауссиана,
— гауссиана,  — оператор нормализации.
— оператор нормализации.
Билатеральный фильтр является средним взвешенным с весом, состоящим из нескольких частей.  — для грани
— для грани  определяет значимость грани
определяет значимость грани  в терминах удаленности друг от друга — чем больше расстояние, тем меньше вес. Аналогично с
в терминах удаленности друг от друга — чем больше расстояние, тем меньше вес. Аналогично с  , только на вес влияет не расстояние между гранями, а разница между векторами нормалей грани. Также учитывается значение площади грани
, только на вес влияет не расстояние между гранями, а разница между векторами нормалей грани. Также учитывается значение площади грани 
В 2015 году улучшают подход с билатеральными фильтрами с появлением Guided Mesh Normal Filtering, где используется направляющая нормаль для сглаживания.
Чего хотели добиться улучшением билатеральных фильтров? Чтобы не сглаживать все подряд, а оставлять достаточно резкими детали меша, которые должны быть резкими. При этом для каждой 3D-модели пользователю необходимо подбирать параметры алгоритмов, чтобы добиться удовлетворительных результатов.
Наряду с фильтрами развивались подходы mesh denoising, основанные на оптимизации. Так, например, в работе Mesh Denoising via L0 minimization авторы максимизируют плоские поверхности меша и постепенно устраняют шум, не сглаживая при этом углы. Данный подход хорош в случаях, когда все отсканированные объекты — CAD-модели с правильными геометрическими формами.
Первые попытки обучения алгоритмов для mesh denoising
Настоящим прорывом в 2016 году стала работа Mesh Denoising via Cascaded Normal Regression, в которой впервые использовались данные для обучения алгоритма. Прежде всего, авторы создали соответствующий датасет из noisy и ground truth (GT) 3D-моделей с разным шумом (доступен по ссылке проекта).
Датасет состоит из синтетических данных (Synthetic) и полученных с помощью различных сканеров (Kinect v1, Kinect v2, Kinect Fusion). В Synthetic в качестве noisy моделей используются модели с искусственно сгенерированным шумом (используется небольшое случайное смещение координат). Отсканированные данные уже содержат шум, зависящий от параметров сканеров и используемых в них технологий. Для получения GT моделей для реальных сканов использовался сканер Artec Spider c порядком точности, превышающим Microsoft Kinect.
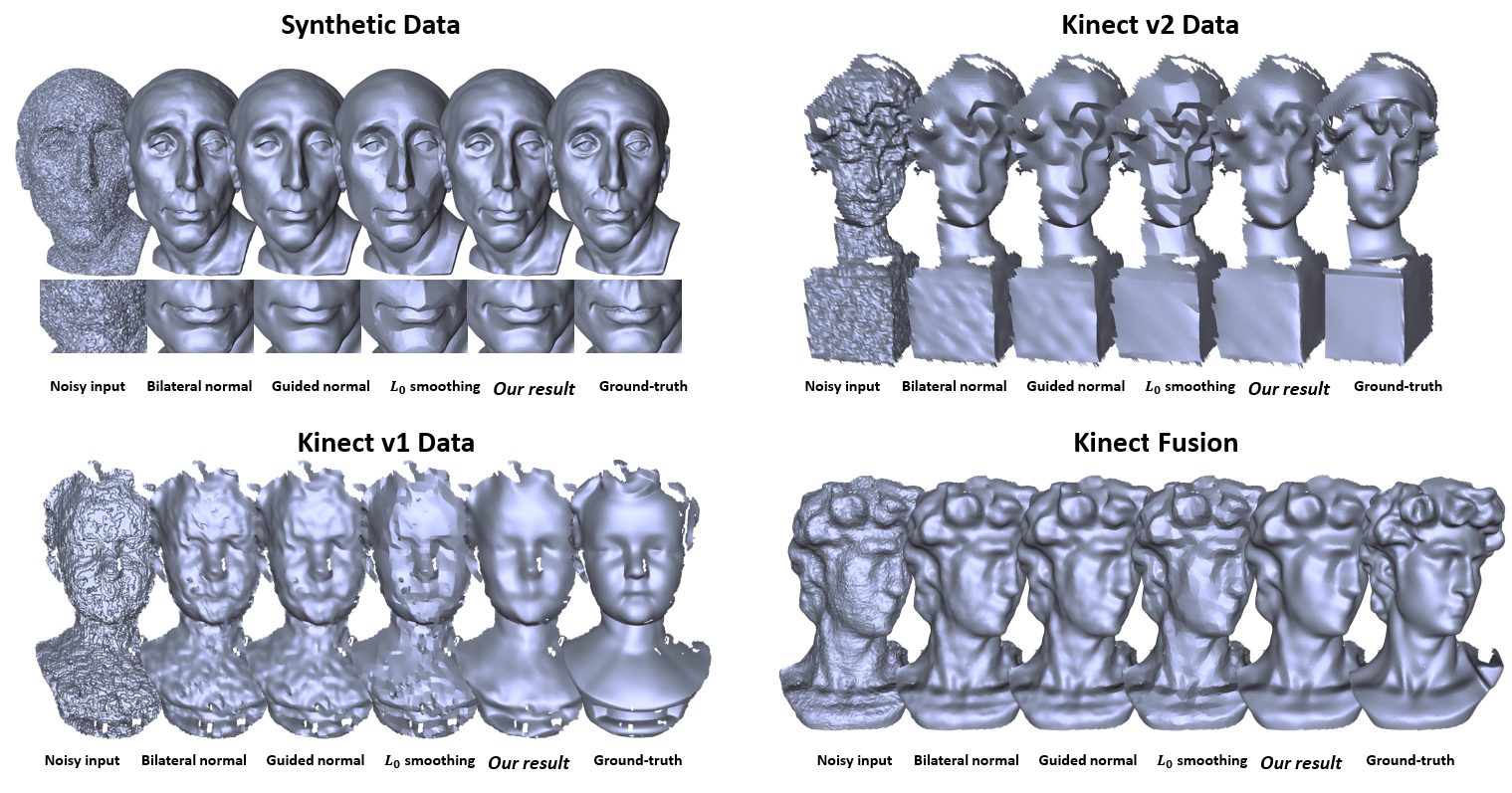 Примеры из датасета
Примеры из датасетаОсновная идея работы — для каждой пары граней noisy и ground truth мешей создать пару дескриптор и GT нормаль. Дескриптор одной грани — это нормаль грани после применения билатеральных фильтров с разными параметрами. Далее такие дескрипторы необходимо разделить на отдельные кластеры, которые определяют принадлежность к той или иной геометрической форме. Для отдельного кластера обучается отдельная регрессия, после которой на выходе получается обновленная нормаль грани. Весь описанный процесс повторяется несколько раз, каскадами.
 Cascaded Normal Regression Pipeline
Cascaded Normal Regression PipelineПочему эта работа является важной? Во-первых, был создан хороший датасет для обучения с синтетическими и отсканированными данными. Во-вторых, авторы наконец ушли от подбора параметров алгоритмов сглаживания для фильтров и позволили выбирать такие параметры нейронной сети. При этом вручную составленные признаки для обучения основываются лишь на билатеральных фильтрах, что значительно ограничивает возможности метода. Несмотря на это, данная работа запустила волну применения обучающих подходов для mesh denoising.
После этого появилась работа NormalNet: Learning based Guided Normal Filtering for Mesh Denoising. Основная идея — обучать сверточную нейронную сеть для определения направляющей нормали, после применять Guided Mesh Normal Filtering. Для определения направляющей нормали происходит вокселизация локальной структуры каждой грани меша (voxel — объемный пиксель), чтобы привести его к упорядоченному представлению и иметь возможность использовать CNN. Общий пайплайн работы представлен на картинке ниже.
 NormalNet pipeline
NormalNet pipelineСледующий рисунок иллюстрирует архитектуру сетки в NormalNet. На вход каждой CNN подаются 4-мерные массивы, полученные после вокселизации, содержащие информацию о координатах вершин набора граней и усредненной нормали этого набора. Наборы граней (патчи) в терминах данной работы — это некоторое количество соседних граней для одной грани. При создании нейронной сети авторы вдохновлялись архитектурой ResNet, которая позволяет учитывать информацию, полученную с предыдущих слоев сетки. Для составления карты признаков для каждого патча входные данные обрабатываются тремя блоками с конволюциями. Выходные полносвязные слои преобразовывают карту признаков к трехмерному вектору, который является направляющей нормалью для одного патча.
 Архитектура CNN в NormalNet
Архитектура CNN в NormalNetТаким образом, итеративно получая с помощью вокселизации и CNN направляющие нормали, а после применяя Guided Normal Filtering, авторы строят процесс устранения шума. Грубо говоря, в данном подходе происходит очередное улучшение качества сглаживающего фильтра Guided Normal Filtering.
Наконец, от использования билатеральных фильтров решили отказаться в работе DNF-Net: a Deep Normal Filtering Network for Mesh Denoising и предоставили полное управление процессом фильтрации шума нейронным сетям. Это первая работа, которая делает end-to-end процесс фильтрации без ручного составления признаков. С помощью отдельных логических частей нейронной сетки на основе ResNet авторы формируют карты признаков для всего меша с шумом и отдельно для шума, а после их обработки получают обновленные нормали граней.
 Архитектура DNF-Net
Архитектура DNF-NetНа вход DNF-Net принимает патчи граней: нормали и индексы соседних граней. С помощью блока multi-scale feature embedding unit составляется карта признаков для каждого патча. В этом блоке анализируется локальная геометрическая структура меша на разных масштабах. На трех уровнях (см. картинку ниже) составляются три разные локальные карты признаков , которые учитывают разное количество соседних граней (по возрастанию). После их конкатенации и прогона через полносвязные слои нейронной сети получается глобальная карта признаков F для каждой грани меша.
 Multi-scale Feature Embedding Unit
Multi-scale Feature Embedding UnitВпоследствии с помощью residual learning unit аналогичным образом извлекается карта признаков для шума. С помощью KNN (K-Nearest Neighbors) происходит поиск k похожих граней в представлении созданных признаков. Из продублированной k раз исходной карты признаков вычитаются карты признаков похожих граней. Аналогично используются полносвязные слои нейронной сетки формирования «шумной» карты признаков.
 Residual learning unit
Residual learning unitФинальная карта признаков, которая содержит в себе информацию о грани без шума, получается с помощью вычитания «шумной» карты признаков из исходной. Опять же, с помощью полносвязных слоев результат приводят к виду трехмерного вектора, который уже является окончательной нормалью грани без шума.
С таким подходом есть возможность использовать для обучения нейронной сети не только нормали граней и индексы соседей, а еще и другие пространственные признаки — центроиды граней, координаты вершин граней и т.д. Но здесь все еще не учитывается глобальная топологическая структура меша, а понятие «глобальности» ограничивается лишь количеством соседей при изначальном преобразовании данных.
Deep learning и свертки на графах
Чтобы избавиться от ограничений в виде числа параметров и соседей, необходимо работать с целым мешем, а не отдельно составленными патчами. А для построения сложных архитектур нейронных сетей с хорошей обобщающей способностью, надо как-то привести нерегулярное представление меша к регулярному. Во всей области 3D DL существует несколько популярных подходов для этого: вокселизация меша и представление меша как графа.
Так, в работе Mesh Denoising with Facet Graph Convolutions был предложен еще один end-to-end pipeline для устранения шума с помощью представления мешей как графов, только вместо натурального представления графа полигональной сетки (вершины, связанные с вершинами) используется другое — грани, связанные с гранями. Основная идея — сгенерировать граф и запустить на нем сверточную нейронную сеть.
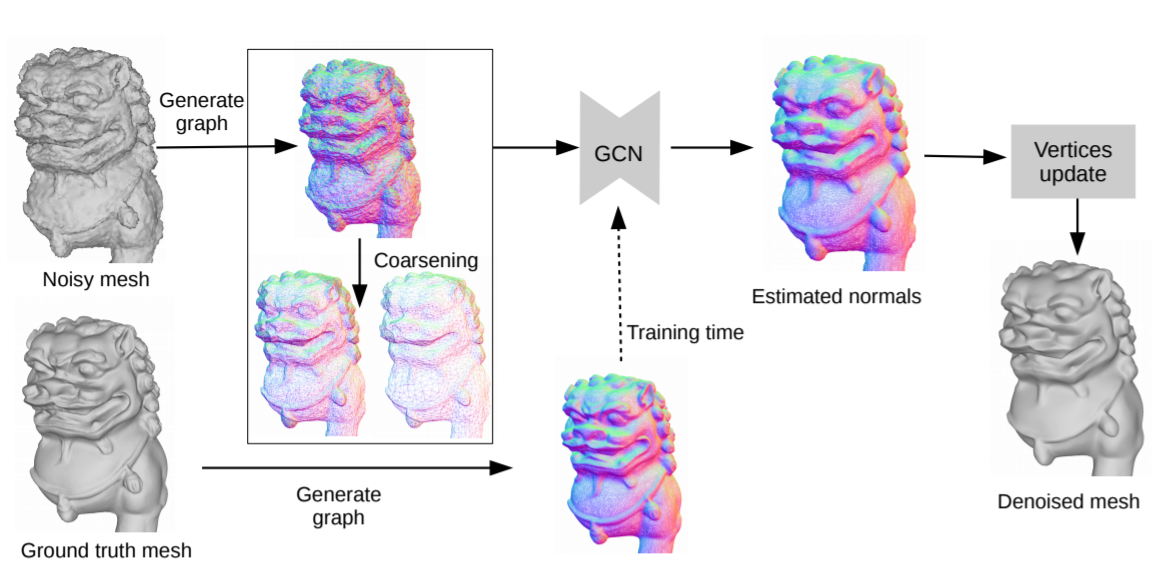 Facet Graph Convolution pipeline
Facet Graph Convolution pipelineВ основе этого метода лежит архитектура U-Net, которой на вход подаются координаты граней и соответствующих нормалей созданного графа, а на выходе получаются скорректированные нормали граней.
 Архитектура Graph Convolution Network
Архитектура Graph Convolution Network Свертка графа
Свертка графаГрафовое представление и U-Net позволяют учитывать геометрические особенности меша как в локальной структуре (как в предыдущих методах), так и в глобальной.
Заключение
Интересно наблюдать, как эволюционируют подходы обработки 3D моделей с развитием технологий. Когда-то обычные сглаживающие фильтры были пиком совершенства, сейчас же все по-другому: появляются интересные статьи, в которых ручная обработка мешей заменяется автоматической с помощью нейронных сетей и глубокого обучения.
На данный момент в задаче mesh denoising, и, в общем, в задачах обработки полигональных сеток, все большую популярность приобретают подходы с графовым представлением мешей, с помощью которого можно учитывать как локальную (в пределах одной грани), так и глобальную структуру меша.
В Twin3d мы занимаемся разными задачами, и mesh denoising входит в их число. В будущих статьях будем рассказывать уже о своих разработках, не пропустите;)
