Экскаватор превратили в автономного робота, способного копать траншеи самостоятельно

Объединенная команда швейцарских и немецких инженеров преобразовала обычный шагающий экскаватор в автономного робота, который умеет рыть траншеи определенной конфигурации. При этом точность рытья траншей достаточно высокая — 3 сантиметра.
По словам разработчиков проекта, такие устройства нужны строителям, поскольку они позволяют ускорить процесс компания траншей на строительной площадке. Кроме того, робот может выкопать траншею точнее, чем человек (если не считать, конечно, специалистов высокого класса). Но здесь есть проблема — например, сложность отображения карты окружающего пространства для робота. Еще одна проблема — определение роботом собственного местоположения в условиях быстро меняющейся конфигурации площадки. 
Но все получилось — инженеры под руководством ученого Марко Хюттера (Marco Hutter) все же разработали автономный экскаватор, который может рыть траншеи разных конфигураций с высокой точностью и скоростью. Базой для создания робота послужил шагающий экскаватор Menzi Muck M545. Разработчики робота приняли решение заменить гидроузлы экскаватора на «умные», в которых установлены разного рода сенсоры и датчики.
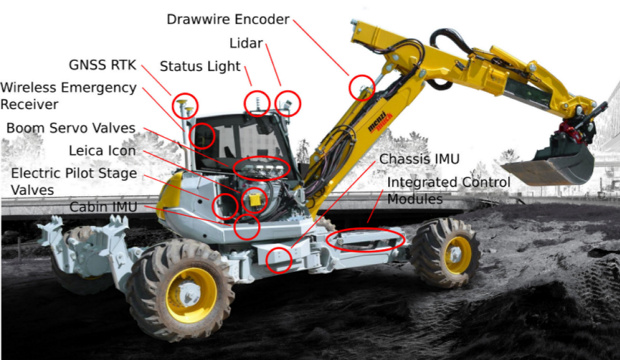
Они дают возможность системе «понимать» и отслеживать силу взаимодействия с грунтом. Экскаватор также оснащен датчиками GPS и RTK-приемниками, что увеличивает точность определения местоположения системы, плюс лидары и инерциальные блоки. Благодаря доработке экскаватор научился точно определять свое местоположение, заодно хорошо «представляя», что за грунт предстоит рыть.
Для робота были созданы специальные алгоритмы, которые позволили составлять модель окружения, точно рассчитав систему движений ковша, необходимых для создания траншеи нужной формы. Одна из сложностей, стоявших перед учеными, в том, что грунт после того, как ковш выходит из траншеи, осыпается вниз. Т.е. определенный объем грунта возвращается в место его выемки. Алгоритмы предусматривают такую возможность и экскаватор «знает», что делать.
Робота затем протестировали на одной из строительных площадок, ему нужно было выкопать траншею с профилем в виде трапеции. После завершения работы оказалось, что точность работы системы составляет около 3 сантиметров. А это значительно выше точности, полученной другими разработчиками.
В дальнейшем этот экскаватор-робот будет протестирован и в других условиях. В итоге должен получиться робот, который умеет работать сам, без наблюдения и поддержки со стороны. Такой робот будет эффективно помогать строителям, ускоряя процесс выкапывания траншей.
Это не единственный проект команды ученых, о которой говорилось выше. Она уже несколько лет работает над роботизацией экскаваторов и других систем, которые работают на стройке. Так, аналогичный шагающий экскаватор был превращен в управляемый удаленным оператором агрегат.
